基于无线网络的集群航天器控制系统重构技术研究
2015-11-02 03:36:42王训王兆魁张育林
指挥与控制学报 2015年3期
王训 王兆魁 张育林
1.国防科学技术大学航天科学与工程学院 湖南 长沙410073 2.清华大学航天航空学院北京100084
集群航天器由数量众多的微小航天器构成,成员航天器彼此间协同工作,共同执行设定的任务[1−3].与传统单个大卫星相比,集群航天器具有可执行任务广泛多样、布置灵活以及成本低等优点,具有广阔的发展前景.
目前的集群航天器中,成员航天器之间主要采用无线通信方式,然而,成员航天器内部的各个单元部件,例如,各执行器和各敏感器,与星载计算机之间主要采用CAN总线通信方式,因此,在开发成员航天器时,需要通过接口器件和电缆线,将各个单元部件挂接到CAN总线上.这种通信方式存在局限性:1)当总线上挂接的某个单元部件出现故障时,有可能导致整个成员航天器均无法正常执行任务;2)使用接口器件和电缆线,一方面,增加了成员航天器的尺寸和重量,另一方面,也增加了结构设计的复杂性;3)当某个单元部件出现故障后,难以进行在轨的替换和升级,导致航天器控制系统的柔性和可重构性能力有限[4−6].
针对现有技术存在的缺陷,本文提出了一种基于航天器无线网络的多线程控制方法,首先分析了成员航天器内部的各个单元部件与星载计算机之间无线通信方式,然后重点对多线程控制方法进行分析与设计,最后设计实验系统,验证提出的方案对集群航天器系统重构功能增强的有效性.
1 基于无线网络的航天器控制系统
航天器控制系统主要由星载计算机、传感器、执行器及有效载荷构成,现有的航天器控制系统主要通过CAN总线连接,进行数据的传输,本文采用无线网络的数据传输,取代传统的总线连接,设计了一种基于无线网络的航天器控制系统[7−8],如图1所示.
基于无线网络的航天器控制系统包括:星载计算机和多个单元部件.成员航天器搭载星载计算机和多台单元部件,星载计算机包括星载计算机本体以及与星载计算机本体连接的第一无线网络节点机,
通过第一无线网络节点机,星载计算机本体具有无线通信能力.单元部件是指各敏感器部件、执行器部件和载荷部件,单元部件包括单元部件本体以及与单元部件本体连接的第二无线网络节点机,通过第二无线网络节点机,单元部件具有无线通信能力.
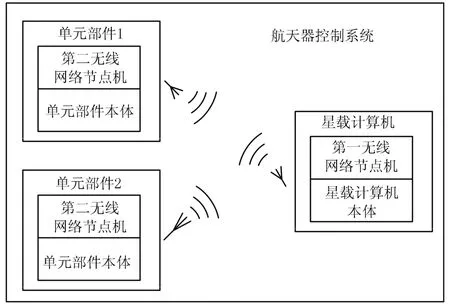
图1 基于无线网络的航天器控制系统
集群航天器由多个成员航天器组成,以单个成员航天器的无线网络控制系统为基础,进行整个网络系统的设计.每个成员航天器均设置一个无线控制网络,初始时,为每个成员航天器的无线控制网络分配全局唯一的网络ID号,对应唯一的网络工作频道,同时分配公共网络ID号,公共网络ID号对应唯一的网络公共申请频道,同时为每个星载计算机设置全局唯一的星载计算机ID,为每个单元部件设置全局唯一的单元部件ID.
2 系统重构的多线程设计
可重构性是实现集群航天器资源在轨优化配置和高效利用的必备要素,能够提高集群航天器执行任务的效率、拓展集群在轨应用的范围,本文进行航天器的多线程设计,旨在解决集群航天器系统在轨控制系统重构过程的可行性与安全性.
基于航天器无线网络的多线程控制方法如图2所示,主要由星载计算机启动响应部件入网请求线程、主动断开部件连接线程、部件故障检测线程、星载计算机自诊断线程和与部件传输有效数据线程5个线程构成,通过线程的合理调度与使用,实现集群航天器系统重构.
2.1 星载计算机响应部件入网请求线程
初始时刻,成员航天器根据任务需求,通过自身的星载计算机存储可信部件列表,可信部件列表由星载计算机需要进行无线通信的多个单元部件ID组成.星载计算机通过响应部件入网请求线程,将单元部件加入自身所在的无线网络.
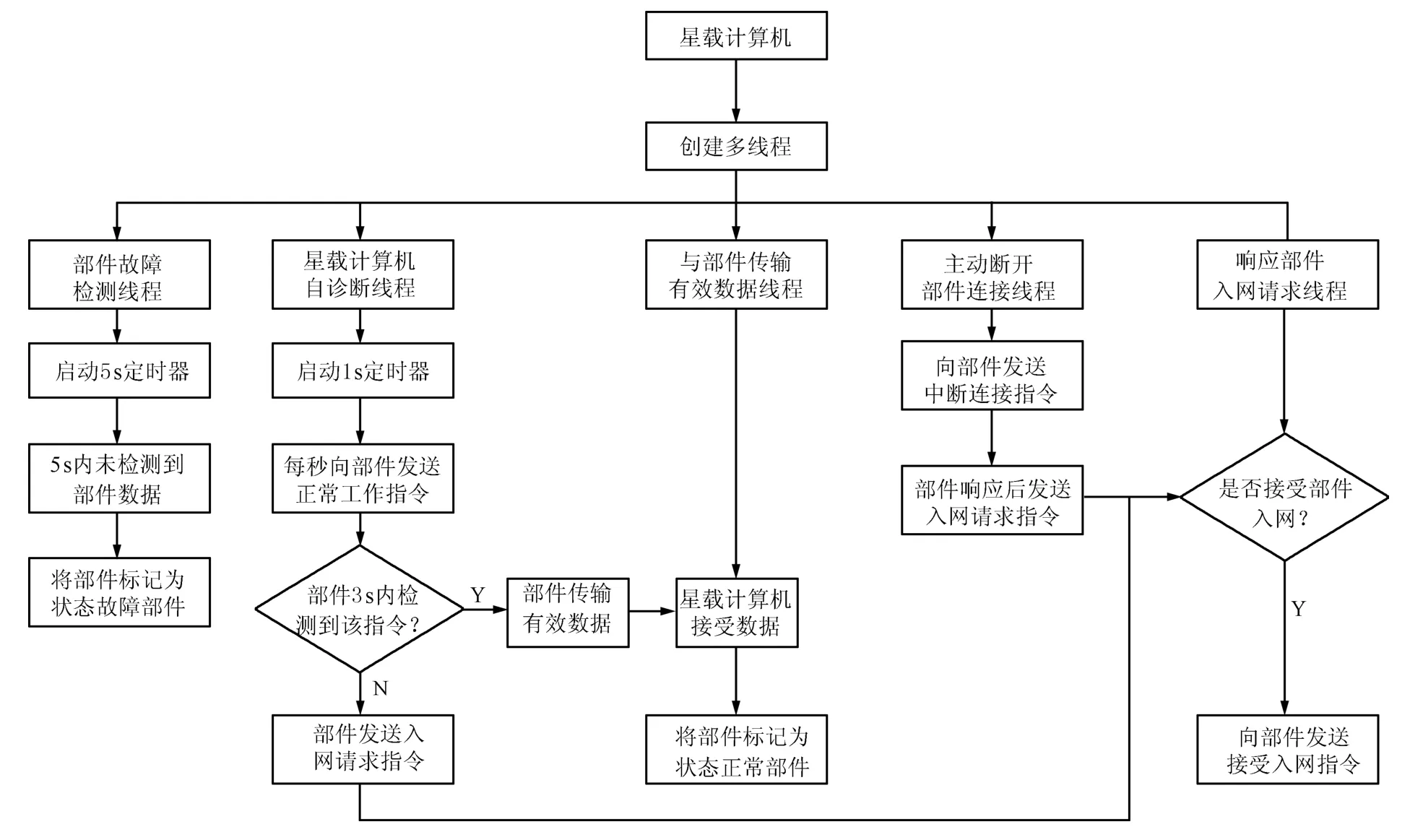
图2 基于航天器无线网络的多线程控制
星载计算机启动响应部件入网请求线程,监听网络公共申请频道,判断是否存在单元部件在公共网络以广播的形式发送入网请求指令,其中,入网请求指令携带有单元部件ID,如果有星载计算机对入网请求指令进行解析,获得单元部件ID,然后,判断单元部件ID是否位于自身存储的可信部件列表,如果不位于,则屏蔽入网请求指令;如果位于,星载计算机向单元部件ID发送接受入网的通知消息,其中,通知消息携带有星载计算机当前所处的网络ID号以及目的节点;目的节点为单元部件ID.
单元部件ID在广播入网请求指令后,即进入监听状态,当单元部件ID在接收到某条接受入网的通知消息时,对通知消息进行解析,获得网络ID号以及目的节点,并判断目的节点是否为自身ID,如果是,则将自身工作频道调整到与网络ID号相匹配的网络工作频道,至此,单元部件ID成功加入认为其可信的星载计算机所处的无线控制网络,星载计算机可与单元部件ID进行正常无线通信.
2.2 主动断开部件连接线程
当星载计算机接收到对其存储的可信部件列表中的某一个单元部件ID进行删除的通知消息时,星载计算机运行主动断开部件连接线程,主动断开与该单元部件ID的无线通信链路,将单元部件从自身所在的无线网络断开,具体实现方式如图4所示.
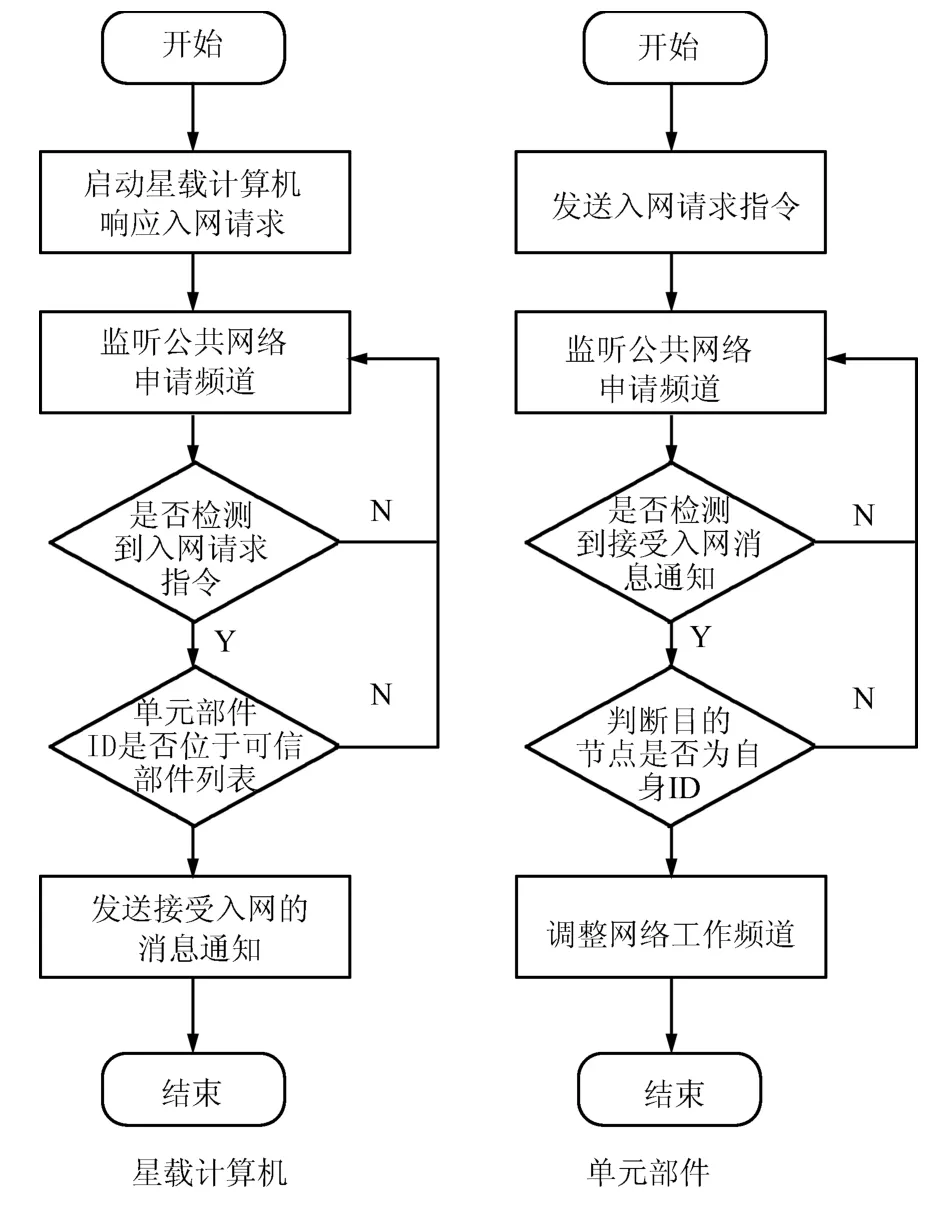
图3 星载计算机响应部件入网请求线程
星载计算机向单元部件ID发送中断连接指令,其中,中断连接指令携带有需要中断连接的单元部件ID;单元部件ID接收到中断连接指令后,对中断连接指令进行解析,判断是否为对自身发出的中断连接指令,如果是,单元部件ID将自身工作频道调整到网络公共申请频道,并在公共网络以广播的形式发送入网请求指令,等待认为其可信的星载计算机将其加入到对应的无线控制网络.
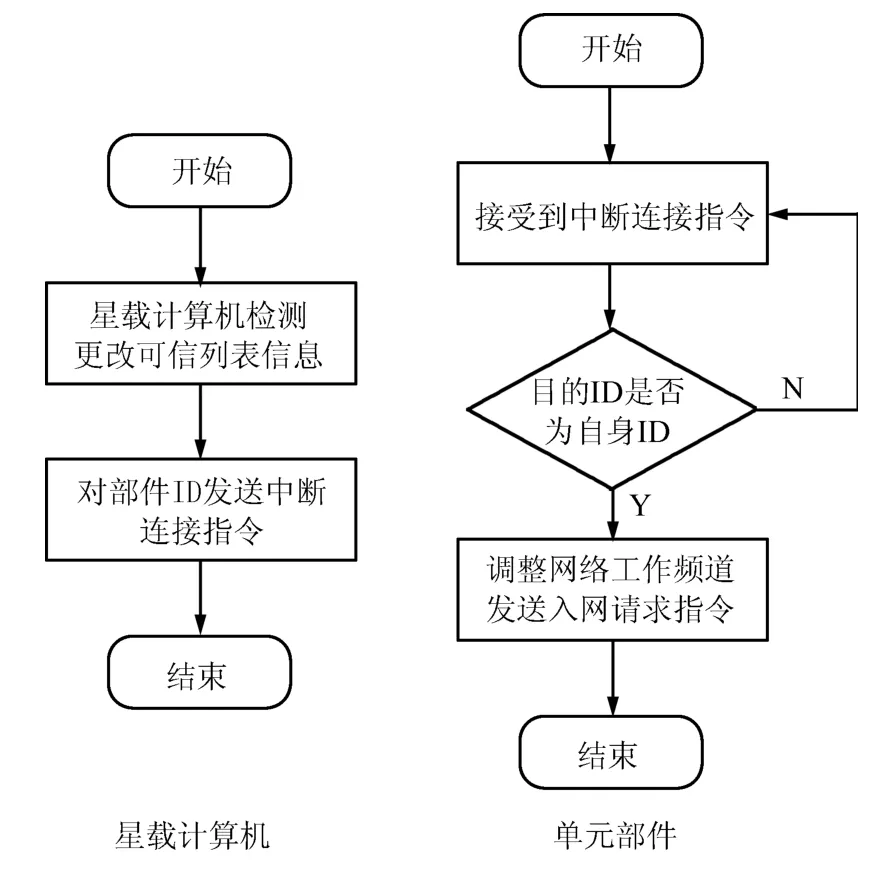
图4 星载计算机主动断开部件连接线程
2.3 部件故障检测线程
在星载计算机与其存储的可信部件列表中各单元部件ID均加入无线控制网络之后,星载计算机运行部件故障检测线程,对与其连接的各单元部件ID是否发生故障进行检测.

图5 部件故障检测线程
如图5所示,各单元部件ID每隔第1设定时间间隔,即向星载计算机发送自身状态正常的通知消息;星载计算机每隔第2设定时间间隔,判断是否接收到单元部件ID发送的自身状态正常的通知消息,如果接收到,则星载计算机得出单元部件ID为正常状态的结论,继续与单元部件ID进行无线通信;如果未接收到,则星载计算机得出单元部件ID为故障状态的结论.
2.4 星载计算机自诊断线程
在星载计算机与其存储的可信部件列表中各单元部件ID均加入无线控制网络之后,星载计算机运行星载计算机自诊断线程,检测自身是否发生故障.
如图6所示星载计算机每隔第3设定时间间隔,向各个单元部件ID广播自身状态正常的通知消息;单元部件ID每隔第4设定时间间隔,判断是否接收到星载计算机广播的状态正常的通知消息,如果接收到,则单元部件ID得出星载计算机为正常状态的结论,继续与星载计算机进行无线通信;如果未接收到,则单元部件ID得出星载计算机为故障状态结论.
2.5 部件传输有效数据线程
当单元部件成功加入到星载计算机所属的无线控制网络后,星载计算机运行部件传输有效数据线程,通过部件传输有效数据线程,与单元部件进行有效数据传输.
3 系统设计
进行任务响应设计,包括控制系统重构和导航系统重构,然后构建实验系统进行验证.导航系统重构时,其中一航天器通过部件级无线网络节点接管另一个航天器的敏感器单元实现对后者导航系统的管理与控制,从而加强前者的导航能力,并辅助后者完成基本导航数据的获取.
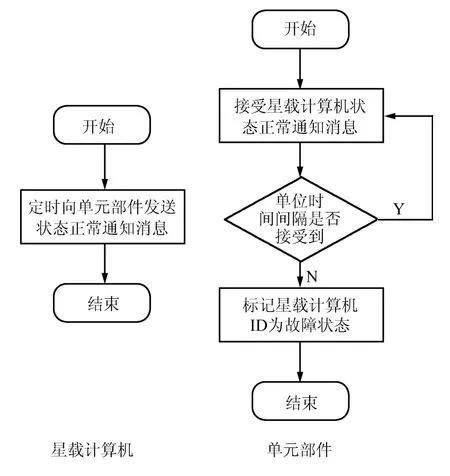
图6 星载计算机自诊断线程
控制系统重构时,其中一航天器通过部件级无线网络节点接管另一个航天器的执行器单元实现对后者控制系统的管理与控制,从而辅助后者完成控制操作,保证后者基本生存.当两卫星通过机械接口进行固联后,控制系统重构可以增强主控卫星的控制执行能力.
构建系统重构演示验证系统,如图7所示.
系统重构演示验证系统由两部分构成:第1部分是1号成员航天器,包括1号成员航天器星载计算机,1号GPS接收机,2号GPS接受机,3号星敏感器模拟器,4号推力器模拟器;第2部分是2号成员航天器,包括2号成员航天器星载计算机,5号GPS接收机,6号IMU,7号星敏感器模拟器,8号力矩陀螺模拟器.
在1号和2号星载计算机上运行系统重构演示验证软件,图8为执行系统重构演示验证的软件界面.
初始时刻,1号成员航天器连接1号GPS接收机、2号GPS接受机、3号星敏感器模拟器、4号推力器模拟器;2号成员航天器连接5号GPS接收机、6号IMU、7号星敏感器模拟器、8号力矩陀螺模拟器,通过采用上述的多线程算法的设计,演示验证系统的导航重构,得到实验结果如图9所示.
图9的1号成员航天器的“已连接设备”窗口中,显示1号成员航天器已经连接2号成员航天器的5号GPS接收机,且在“成员航天器星载计算机接收到的数据”窗口中,已经显示了5号GPS接受机数据,证明导航重够成功,1号成员航天器可以共享2号成员航天器的GPS接收机.
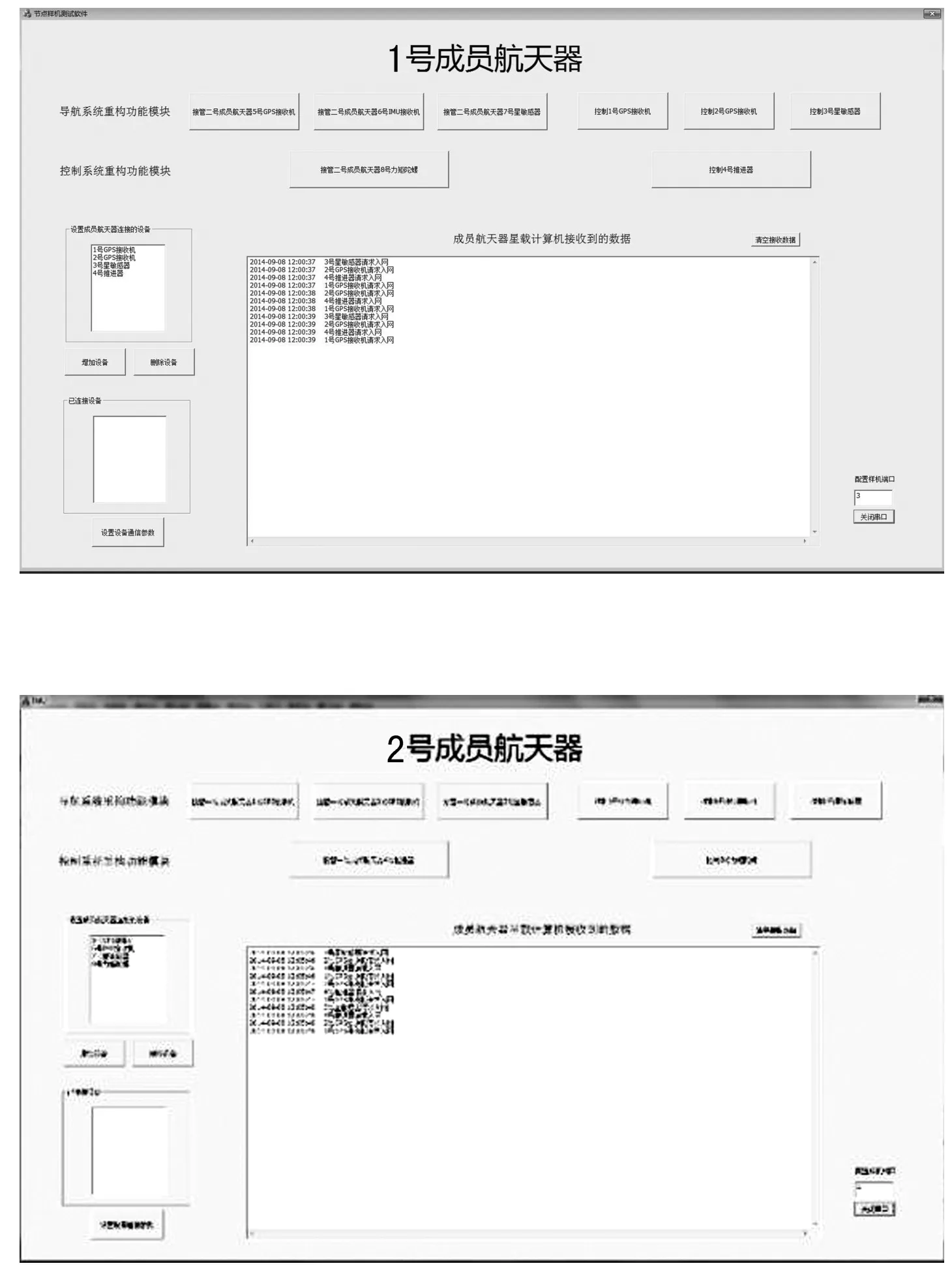
图8 系统重构演示验证软件界面
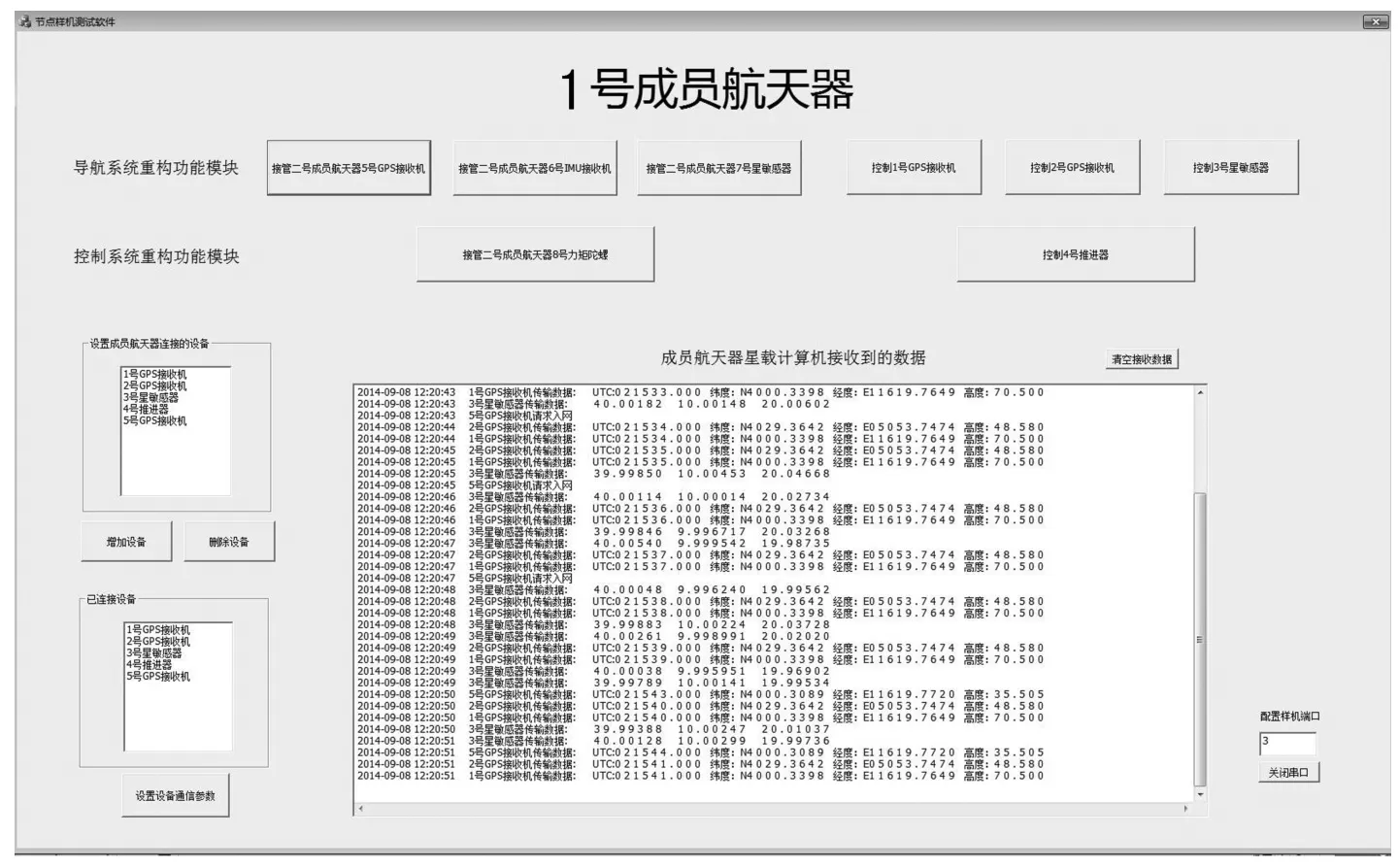
图9 导航重构演示结果
4 结论
本文针对目前集群航天器系统中成员航天器组件通过CAN总线连接存在的问题,设计成员航天器内部的各个单元部件与星载计算机之间采用无线通信方式,既不需要在成员航天器上进行复杂的布线设计,也减少了成员航天器的尺寸和重量,降低了结构设计的复杂性;通过对每个成员航天器的无线通信机制的设计,可以有效提高航天器控制系统的柔性和可重构性,有利于航天器部件的升级或替换,增强集群航天器功能.
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
铁道通信信号(2020年12期)2020-03-29 06:22:16
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
环球市场(2017年36期)2017-03-09 15:48:21
信息安全研究(2016年4期)2016-12-01 06:07:04
移动通信(2015年17期)2015-08-24 08:13:12
吉林建筑大学学报(2012年3期)2012-08-15 00:54:52
通信世界(2012年36期)2012-07-16 08:51:46