某轻型客车高速时方向盘摆振原因分析及处理
2015-11-01 06:42:25钱友军张奇奇张享享
汽车科技 2015年3期
钱友军,张奇奇,张享享
(1.安徽江淮汽车股份有限公司 技术中心 合肥 230022;2.武汉理工大学 现代汽车零部件技术湖北省重点实验室 武汉 430070;武汉理工大学 汽车零部件技术湖北省协同创新中心 武汉430070)
某轻型客车高速时方向盘摆振原因分析及处理
钱友军1,张奇奇1,张享享2
(1.安徽江淮汽车股份有限公司 技术中心 合肥 230022;2.武汉理工大学 现代汽车零部件技术湖北省重点实验室 武汉 430070;武汉理工大学 汽车零部件技术湖北省协同创新中心 武汉430070)
为了消除某轻型客车在高速时产生的方向盘摆振现象,提高车辆的操纵稳定性和行驶安全性,本文通过理论分析和试验验证的方法对该款轻型客车的方向盘摆振现象的产生机理及其振源进行了分析。试验和分析的结果表明高速时方向盘的摆振现象是由车辆前轴各旋转部件动不平衡所引起的,通过控制相关部件的端面跳动和动不平衡量可以消除或明显减弱高速时的方向盘摆振问题。
方向盘摆振;端面跳动;动不平衡量
钱友军
毕业于武汉汽车工业大学,现任安徽江淮汽车股份有限公司技术中心商用车研究院开发管理部平台总监,研究方向:轻卡平台产品开发。
1 引言
汽车在行驶时始终处于振动状态,由于路面不平,车速和运动方向的改变,发动机工作激励以及车轮和传动系统的不平衡质量,产生整车和局部的强烈振动[1]。方向盘是驾驶员直接操纵汽车的主要器件,汽车在行驶过程中产生的各种振动会经转向系统传到方向盘上,即产生相应的“路感”。有时由于某种原因产生的振动会过于强烈,导致驾驶员有一种抓不住方向盘的感觉(剧烈摆振),进而影响到驾驶员对汽车的正常操控,使汽车的安全性、平稳性及舒适性严重下降,因此需要将方向盘的摆振水平严格控制在一定的范围内。我国对汽车转向轮摆振问题的研究始于上世纪60年代,经过对有关车型的研究,国产汽车的转向轮摆振现象得到了有效的控制[2-3]。
汽车的摆振易发生在直线行驶时,直线稳速行驶距离越长,摆振现象越容易出现[4]。江淮某轻型客车在行驶到100Km/h-120Km/h速度区间时,方向盘出现剧烈摆振,并整车伴随有轻微振动,严重地影响了驾驶员的操纵稳定性。本文将对该问题进行理论影响因素的分析、具体故障的定位与排查以及整车改进验证,最终达到消除剧烈摆振的目的。
2 摆振影响因素
针对该车型在100km/h-120km/h速度区间时出现摆振现象进行理论分析有如下几方面的影响因素:
2.1前轮定位参数设计不合理或失常
车辆前轮定位参数由主销内倾角、主销后倾角、前轮外倾角及前轮前束四个要素组成,且不同型号的车辆定位参数也不相同[5]。通过四轮定位使汽车保持稳定的直线行驶和转向轻便, 并减少汽车在行驶中轮胎和转向器件的磨损[6]。当车辆前轮参数不合理或失准时,转向轮的稳定效应就会被破坏,出现左右摆动现象,进而发生方向盘摆振。
2.2振动源的传递路径存在结构强度偏弱问题
在相同的激振力作用下,通过适当提高机械结构的静刚度来提高其抗振能力。如果振动源的传递路径存在结构偏弱或安装部件的紧固力不足就会使振幅增大,进而使振动加剧[7]。
2.3转向系统结构在激励范围内存在共振
一般来说转向柱的一阶固有频率在30Hz以上,当主要激励频率与结构的固有频率相等或接近时,结构的动刚度显著下降,响应振幅急剧变大,激起部件强烈振动[8],即发生共振。此时可以通过改变共振件的固有频率来有效地减少部件的振动及噪声。
2.4车轮、轮毂带制动盘总成动不平衡量偏大
车轮是由轮胎、轮毂组成的一个整体,但在制造中由于某些原因,这两部分的质量不能保证非常均匀地分布。因此当车轮高速回转时,就会出现不平衡状态。由于动不平衡将产生沿车轮半径方向的离心惯性力Pg,如下图1所示:
式中:Pg—为惯性力(N),
Mg—为力矩(N·m),
e—为离心力到车轮主销的距离,
M—为车轮(kg),
V—为车辆行驶速度(m/s),
R—为车轮半径(m),
t—为行驶时间(s)
此力矩将使车轮绕主销回转,且是周期性变换的,其频率 f取决与车速 v :
式中:v—为车辆行驶速度( m / s ) ,
s —为行驶时轮胎周长( m )。
从上式可以看出, 该激励频率随着车速的增加而增加。当离心惯性力的频率与转向轮绕主销振动的固有频率相近时,就会发生强烈的摆振。方向盘摆振问题一般发生在十几赫兹左右,而人手敏感的频率一般在8 Hz —16 Hz[9],因此,方向盘摆振对手臂还是很敏感的。
以上影响因素均有可能造成汽车行驶过程中出现方向盘摆振,接下来就该微型客车在开发过程中出现的方向盘摆振问题进行排查。
3 故障排查
3.1检查车辆四轮定位参数
通过检查故障车辆的四轮定位参数发现,其定位参数值与设计值基本保持一致,由此我们可以确定出现的方向盘摆振问题不是由车轮定位参数所引起。
3.2对转向系统固定安装处结构进行CAE分析
通过CAE分析表明,转向系统固定安装处的结构强度符合要求且安装部件的紧固力达到标准范围,因此振源在传递路径上不存在结构偏弱问题,其不是导致方向盘产生摆振的原因。
3.3故障车辆振动传递路径检测及频率分析
对故障车辆进行振动传递路径检测,在转向系统的4个点上(a.方向盘12点位置 b.转向机壳体侧 c转向横拉杆球销固定螺母左端 d 转向横拉杆球销固定螺母右端)布置传感器如图2所示:
又根据高速时方向盘的摆振情况,主要考虑Y向(见图2)的振动情况,对检测到的信号进行梳理,并对产生方向盘摆振的一定范围的频域信号进行分析如图3所示:
观察图3得出:方向盘在10~15Hz、25~35Hz两频率范围内振幅较大,转向器在35~45Hz、60~65Hz、100~105Hz范围内振幅出现峰值,左右横拉杆球头在整个频率范围内振幅变化不是很大。且整车方向盘摆振现象发生时,车速表显示车速为110km/h(30.6m/s)。车轮规格为185R15LT-8PR,理论计算出车轮与地面相互作用产生激励频率为:
由此可知车轮的一阶激励频率与转向柱固有频率相差甚远,其转向系统结构在激励范围内不存在共振。但车轮的激励频率却又与方向盘振动产生的频率基本一致,故可以判断摆振的主要原因是由于前轮旋转部件的动不平衡产生了绕主销的角振动通过转向系统传递到方向盘所致。
由以上分析可以找出故障车辆的原因,下面以国标和行业执行标准为参照对故障车辆进行相关部件的改进与验证。
4 整车试验验证及改进
4.1动不平衡量计算标准
按照目前我国乘用车的执行标准:车轮总成进行动平衡实验后,其单面剩余动不平衡量不应大于10g。又参照国标GB/T 9234 机械振动恒态(刚性)转子平衡品质的要求,其许用剩余不平衡量的计算公式如下:
平衡品质级别的设定:
参照国标中的等级定义,以及同类产品相关企业的执行标准,平衡品质级别的设定参见表1:
表1 乘用车、轻型客车在100-120km/h范围内的平衡品质列表
对回转体部件用动平衡机进行检测时,动平衡机显示的动不平衡量 P 的单位为g,与公式(3)中许用剩余不平衡量的换算如下:
Uper— 许用剩余不平衡量的数值,单位用克毫米(g·mm);
R— 回转体的标定半径,单位(mm)。
针对本车型的参数情况,按照公式(3)计算轮毂、制动盘总成的动不平衡量,工作转速以110 km/h进行计算,轮胎滚动半径设为325 mm,各相关参数及计算结果见表2、表3:
表2 车速在100~120km/h范围内的轮毂动不平衡量
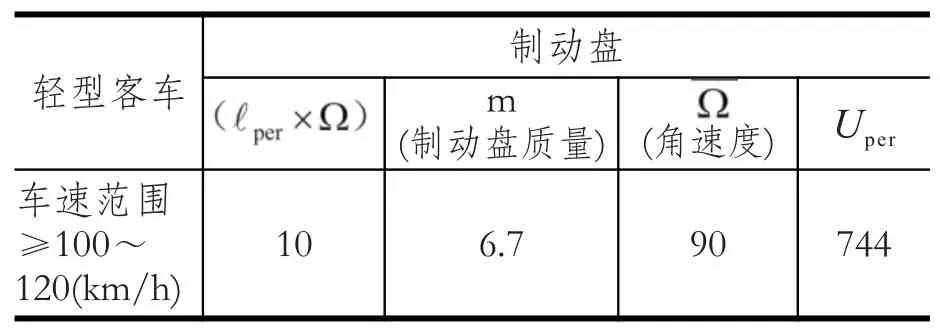
表3 车速在100~120km/h范围内的制动盘总成动不平衡量
如以上计算所示,本车轮毂带制动盘总成的许用动不平衡量为 Uper≤ 1244+744=1988 (g·mm)。

4.2轮毂带制动盘总成的动不平衡试验
将回转体安装在动平衡机的支撑位置上,使回转体转动。根据支撑的情况不同,测量支撑处的振动和支反力,然后用分离解算电路计算出回转体的不平衡量,以及找出相对应的位置。再对回转体进行加重或去重处理,直至达到平衡量的要求。
针对本轻型客车进行试验后,检查车轮总成单面剩余动不平衡量,发现其均满足小于10g的要求。
考虑到仪器误差,测量10组轮毂制动盘合件的动不平衡量测量进行比较,其结果如表4、表5所示:

表4 左轮动不平衡量及不平衡点角度列表

表5 右轮动不平衡量及不平衡点角度列表
如表4、表5所示,左、右车轮出现较大动不平衡量的角度区域都很集中,其中左轮角度主要集中在259 ~ 273°,右轮主要在227 ~ 231°。而且随着角度的增加其各自动不平衡量的波动变化无规律可言,左轮动不平衡量主要集中在38.9~40.74g之间、右轮在45.7 ~ 47.17g之间。由于部件供应厂家未对部件进行动不平衡量检测及相应的去重处理,导致部件的动不平衡量均远大于许用动不平衡量19g。
4.3整车改进及批量装车验证
按照本车轮毂带制动盘合件的许用动不平衡量19g的要求,对相应部件进行去重处理。然后将此两盘毂合件装配到故障车辆中,安装先前轮胎进行整车验证,抖动故障消失。因此根据以上验证,对影响方向盘高速时摆振的轮毂、制动盘合件和轮胎总成的动平衡重新制定技术要求。并对市场上的3辆故障车辆,进行安装动不平衡量满足要求的轮胎总成和前轮毂合盘总成,有效地消除了高速时方向盘的摆振现象。
统计各月份下线车辆方向盘高速抖动台数及其故障率统计如图4所示,其中从2011年9月开始用整改后的部件进行装车。
由图4可以看出,未用整改后部件装车的月份其下线故障率较高,而从9月份开始用整改后的部件进行装车后,其9、10两个月份的下线故障率显著下降,并保持在一个较低的故障率水平上。对于9、10月份总共出现的5台故障车辆进行分析,根据相关部件检测结果,更换标准轮胎或轮毂后道路试验状态良好;为保证方向盘抖动出厂故障率为0,因此生产过程中需要对轮胎、轮毂等来件的品质进行严厉管控。
5 结束语
通过以上理论分析和试验论证,可明确得出该车型高速时方向盘摆振是由轮毂、制动盘总成及轮胎总成的动不平衡量偏大引起的,车轮等旋转部件高速时较大的力矩波动是产生方向盘摆振的振源。本文验证了对相应部件进行去重处理可以很好地消除方向盘摆振现象的方法,得出通过控制轮毂、制动盘总成的动不平衡量和车轮总成的动不平衡量是控制高速时方向盘摆振的一种经济而又有效的措施。
参考资料:
[1]刘岩 汽车高速振动仿真与试验研究[J]公路交通科技,2000(3):21-22.
[2]管迪华 汽车转向轮摆振的仿真计算研究[J]汽车工程,1982(2):18-19.
[3].郭孔辉、刘青 轮胎动态侧偏特性对汽车摆振的影响[J]汽车技术,1995(4):36-37.
[4]刘宏飞、许洪国、关志伟等 半挂汽车列车直线行驶横向摆振研究[J]汽车技术,2005,(1):11-14.
[5]陈家瑞 汽车构造.下册(第五版)[M]北京:人民交通出版社,2005(9):194-196.
[6]郭孔辉 汽车操纵动力学原理[M]南京:江苏科学技术出版社,2011(2):145-147.
[7]崔华阁、郑中旭、徐新民 第十届河南省汽车工程技木研讨会[C],2013.
[8]付怀波、王德成 电动机噪声的分析及抑制[J]防爆电机,2010:15-17.
[9]余志生 汽车理论(第五版)[M]北京:机械工业出版社,2009(3):203-206.
专家推荐
田哲文:
本文在找寻方向盘高速摆振原因方面具有较为重要的应用价值,文章实验充分分析合理,表述清楚简洁,参考文献引用恰当,总体评价为优,建议发表。
Analysis&Processing on Steering Wheel Shimmy of the Light Bus at High Speed
QIAN You-jun1, ZHANG Qi-qi1, ZHANG Xiang-xiang2
(1 Technique Center,Anhui Jianghuai Automobile CO.LTD,Hefei 230022,China; 2 Hubei Key Laboratory of Advanced Technology for Automotive Components,Wuhan University of Technology,Wuhan 430070,China;Hubei Collaborative Innovation Center for Automotive Components Technology,Wuhan University of Technology,Wuhan 430070,China)
In order to eliminate one kind of Steering Wheel Shimmy of the Light Bus at high speed, and improve the steering stability and running safety of a vehicle. This paper analyzes the shimmy’s mechanism and source of vibration through the theoretical analysis method and testing validation method. The results of experiments and analysis indicated that the steering wheel shimmy is generated by great imbalance of circumrotatory components. It can be eliminated or reduced effectively by controlling circumrotatory components’ Surface Flounce and Imbalance of Act.
Steering Wheel Shimmy; Surface Flounce; Imbalance of Act
U469.11
A
1005-2550(2015)03-0048-05
10.3969/j.issn.1005-2550.2015.03.010
2015-01-20
猜你喜欢
上海涂料(2021年5期)2022-01-15 06:09:26
考试与评价·高二版(2021年4期)2021-09-10 07:22:44
今日农业(2020年16期)2020-12-14 15:04:59
艺术品鉴(2020年3期)2020-07-25 01:53:42
学生天地(2020年22期)2020-06-09 03:07:40
东坡赤壁诗词(2019年5期)2019-11-14 10:36:10
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
制造技术与机床(2017年10期)2017-11-28 05:24:18
传媒评论(2017年8期)2017-11-08 01:47:36
制造业自动化(2017年2期)2017-03-20 14:26:14