
机载导弹一控四电动舵机控制器研究与设计
2015-10-31 02:12:00张驰
电子设计工程 2015年20期
张驰
(中国科学院长春光学精密机械与物理研究所吉林长春130033)
机载导弹一控四电动舵机控制器研究与设计
张驰
(中国科学院长春光学精密机械与物理研究所吉林长春130033)
电动舵机作为导弹飞行的执行机构,其体积重量的减少有利于导弹性能的提升。为了减小体积重量和节约成本,电动舵机采用三相无刷直流电机+滚珠丝杠直连式结构,采用一个控制器来控制四路舵机。介绍了控制器的硬件结构方案和控制策略,控制器以DSP+CPLD为核心架构,采用位置、速度双闭环PI控制,实现单一控制器同时控制四套电动舵机相互独立工作。实验结果表明,控制器可以正常工作,舵机带宽可达到25Hz。
电动舵机;DSP;CPLD;三相无刷直流电机
舵机系统是导弹控制系统的执行机构,在导弹飞行过程中舵机控制器接收弹载计算机的舵偏角信号,控制电机旋转,从而驱动舵面偏转,产生弹体所需要的控制力矩控制弹体飞行。随着导弹性能要求不断提升,人们对于电动舵机系统的整体要求向着体积不断减小,承载能力不断增强,控制性能不断提高的方向发展。稀土永磁材料和新型大功率电子器件使电动舵机的小型化成为可能。本文舵机系统采用三相无刷直流电机+滚珠丝杠直连式结构。为了减小舵机的体积和重量,舵机系统采用一个舵机控制器控制四套舵机。控制器以DSP+CPLD为核心架构,DSP作为主控CPU,CPLD用于做接口处理,采用位置环和速度环进行双闭环控制[1]。
1 舵机控制器硬件设计
舵机控制器硬件结构如图1所示。舵机控制器以DSP为核心控制器,用CPLD做逻辑处理,DSP和CPLD之间通过数据线、地址线和控制线相连。外部电路包括电源转换电路,电位计的AD采集电路,串口和CAN总线接口电路,霍尔信号和编码器信号接口电路,隔离驱动电路,三相桥式功率主电路。
舵机控制器分为功率电路、数字电路、模拟电路3部分。图1中虚框1为数字电路部分,虚框2中为模拟电路部分,虚框3中为功率电路部分。舵机控制器的功率地和弹上热电池的地是共在一起的,通过两个隔离的DC-DC模块分别将数字地和模拟地与功率地进行隔离,数字地和模拟地通过磁珠单点连接在一起。

图1 舵机控制器硬件结构图Fig.1Block diagram of the structure of rudder controller
电源转换电路将弹上热电池的28 V电压转换成舵机控制器上数字电路部分所需的+5 V、+3.3 V和+1.9 V,模拟电路部分所需的±15 V,功率电路部分所需的+5 V和+15 V。
DSP为整个控制系统的核心,完成电位器AD采样的控制,系统保护、控制算法的实现和通信等任务。TMS320 F28335高速计算能力及丰富的内部集成模块,不仅简化了系统外围模块的设计,也降低了对这些模块支持的应用程序的编写难度,从而使系统的集成度、可靠性得到提高。由于整个系统多达4个舵机,有12路霍尔信号和12路编码器脉冲信号,因此外加逻辑器件来实现逻辑仲裁和脉冲信号的采样,CPLD型号为Altera公司的EPM1270,CPLD主要完成速度环的采样和PWM控制信号的生成。编码器输出信号为差分信号,通过TI公司的芯片SN65175D转换为单端信号,再通过电平转换芯片SN74LVC4245与CPLD相连,在CPLD内完成对编码器输出脉冲个数的计数,通过数据线、地址线和控制线与DSP进行通信,完成系统对电机速度信号的采集。三路霍尔信号与DSP输出的PWM信号以及方向信号在CPLD内进行逻辑组合,得到驱动舵机电机所需的六路驱动信号。
舵机系统采用电位器检测位置信号,与舵机输出轴相连的电位器由电压基准芯片MAX6176提供+10 V的压基准,电位器输出抽头部分的电压经由运算放大器INA128构成的射极跟随器后通过AD转换与DSP相连。DSP自带的12位的AD无法满足系统位置分辨率小于0.001°的要求,所以外扩一个16位的AD转换器,型号为AD公司的AD7606。
主电路与控制电路之间通过磁耦进行隔离,隔离芯片型号为ADUM1401,驱动芯片采用IR公司的IR2136,它由单电源供电,工作频率可达十万赫兹以上,具有强大的欠压和过流保护功能。
舵机控制器的通信接口包括CAN总线接口和隔离式RS-422串口。CAN总线接口用于调试使用,驱动芯片选择TI公司的SN65HVD230。隔离式RS-422串口用于与弹上其他设备进行通信,驱动芯片选择AD公司的ADM2582。为了能够在线配置系统参数,利用DSP的SPI接口外扩了EEPROM芯片。
通过以上设计,控制器可实现舵机的自动控制与对外通信等功能。
2 舵机控制器软件设计
舵机控制器能够实现位置外环和速度内环双闭环控制,舵机的控制系统框图如图2所示。

图2 系统控制框图Fig.2Block diagram of control system
舵机控制器软件包括DSP部分的程序和CPLD部分的程序。控制主程序在DSP完成,CPLD完成编码器脉冲的计数和PWM控制波的生成。DSP内程序主要完成以下工作:
1)通过RS-422总线接收并解码弹载计算机发出的控制指令,并发送舵偏角反馈指令给弹载计算机;
2)对位置、速度传感器数据的采集与处理;
3)控制律计算;
4)生成PWM波。
根据、DSP内程序的主要功能,DSP内程序由以下几部分组成:
1)初始化模块;
2)数据采集与处理模块;
3)控制律计算模块;
4)PWM波生成模块;
5)串口通信模块。
舵机控制器的软件流程图如图3所示。

图3 控制系统软件设计流程图Fig.3Flow chart of program
3 实验结果
根据导弹技术指标要求,电动舵机技术指标如表1所示。

表1 舵机系统技术指标Tab.1The technology requirements of rudder
舵机系统采用三相无刷直流电机+滚珠丝杠直连式结构,减速比为143。舵机跟踪20°阶跃信号结果如图4所示,超调量小于5%。舵机跟踪1°25 Hz正弦信号结果如图5所示,跟踪幅值衰减到0.8°,大于0.707°,延迟时间为8 ms,小于12 ms。图4和图5中虚线为位置指令,实线为舵机实际跟踪曲线。
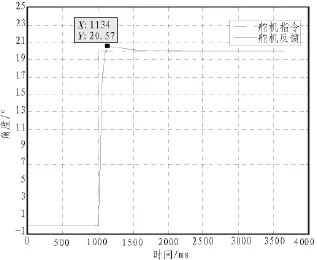
图4 舵机20°阶跃跟踪测试图Fig.4The trail curve of 20°
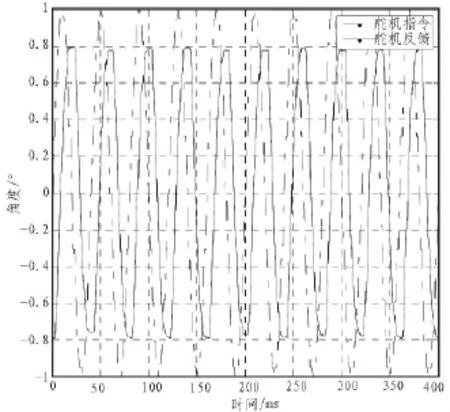
图5 舵机带宽测试图Fig.5The trail curve of bandwidth
4 结论
实验结果表明,电动舵机系统的性能指标达到技术指标要求,本文所设计的以DSP+FPGA为核心的一控四舵机控制器设计合理,工作可靠,减小了舵机系统的体积和重量,可以应用于导弹舵机系统当中。
[1]李志,齐蓉,戴志勇.一控四电动舵机控制器设计[J].微电机,2013,46(4):49-52. LI Zhi,QI Rong,DAI Zhi-yong.Design of electric rudder controller which one drive four[J].Micromotors,2013,46(4):49-52.
[2]景涛.基于DSP的电动舵机伺服与控制[J].信息技术,2013,42(5):12-15. JING Tao.The control of electric rudder based on DSP[J]. Information Technology,2013,42(5):12-15.
[3]范启富,张文锋,温超.基于FPGA的多功能多路舵机控制器的实现[J].控制工程,2008,15(6):696-698. FAN Qi-fu,ZHANG Wen-feng,WEN Chao.Design of multichannel servo-motor controller based on FPGA[J].Control Engineering of China,2008,15(6):696-698.
[4]魏林,陈欣,吕迅竑.无人机无刷直流数字式舵机控制器设计[J].微电机,2008,41(5):46-49. WEI Lin,CHEN Xin,LV Xun-hong.Design of brushless direct current numerical rudder controller for UAV[J].Micromotors,2008,41(5):46-49.
[5]刘涛,吕迅竑,黄一敏.基于DSP的数字舵机控制器设计[J].沈阳航空工业学院学报,2006,23(1):8-11. LIU Tao,LV Xun-hong,HUANG Yi-min.The design of numerical rudder ccontroller base on DSP[J].Joumal of Shenyang Institute of Aeronautical Engineering,2006,23(1):8-11.
[6]范心明.基于SIMULINK的SVPWM仿真[J].电气传动自动化,2009,31(3):19-21. FAN Xin-ming.Simulation of SVPWM based on SIMULINK[J]. Electric Drive Automation,2009,31(3):19-21.
[7]朱信舜,林明耀,刘文勇.无刷直流电动机的正弦波电流驱动方法[J].微电机,2011,44(11):51-55. ZHU Xin-shun,LIN Ming-yao,LIU Wen-yong.Sine-wave current drive method for brushless DC motors[J].Micromotors,2011,44(11):51-55.
The study and design of one-to-four electric rudder controller of the missile with plane
ZHANG Chi
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
As the actuator of the missile,the reduction of volume and weight of electric rudder can improve the performance of the missile.In order to reduce the volume and cost of the rudder in the missile,the electric rudder made the combination of BLDC directed by ball screw,four rudder can be controlled by one controller in the paper.The paper introduced the structure solution and control strategy of the controller,the controller used the DSP and FPGA as the core,consists of DSP+FPGA,the system adopted the double close-loop,it contained speed loop and position loop with PI control strategy.At last,the controller can work for four independent electric rudder at the same time.The experiment results show that the controller can work and the bandwidth of system can reach 25Hz.
electric rudder;DSP;FPGA;BLDC
TN7
A
1674-6236(2015)20-0117-03
2015-03-23稿件编号:201503303
张驰(1986—),男,吉林吉林人,助理研究员。研究方向:电动舵机。
猜你喜欢
小读者(2021年2期)2021-03-29 05:03:20
自动化学报(2019年6期)2019-07-23 01:18:36
汽车观察(2018年10期)2018-11-06 07:05:28
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
电子制作(2018年1期)2018-04-04 01:48:14
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
制造业自动化(2017年2期)2017-03-20 14:26:08
电子设计工程(2017年20期)2017-02-10 03:39:29
电子器件(2015年5期)2015-12-29 08:42:24
