无人机
2015-10-31 07:51编者按
中国学术期刊文摘 2015年13期
·编者按·
无人驾驶飞机(Unmanned Aerial Vehicle,UAV),简称“无人机”,是具有自主程序控制、可进行无线遥控飞行的空中飞行器,可与遥控人员协作完成半自主控制,也可在无人驾驶、控制的状态下自主操作.无人机主要包括飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等,其相关技术涉及隐身、飞行控制、动力、数据链、发射与回收等方面.无人机系统的主要特点有:(1)机体灵活性好,体积小、重量轻.(2)可担负多载荷任务并进行远距离、长时间续航.(3)隐身性能好,生存能力强,费用低廉.(4)安全系数高,自主控制能力强.
第一架无人机是1917年由英国研制成功的.早期的无人机是在退役飞机基础上改装而来的,只能设置固定航线,无法人工干预和自主反应,主要用于炮兵辅助靶标演练.20世纪60年代以后,随着无线电、自动控制、计算机等技术的发展,无人机不再完全依赖地面控制,可以灵活执行多种任务,并应用于战争行动中.到20世纪90年代以来,信息化技术、卫星通信技术、高效空气动力技术等相关技术迅猛发展,无人机的性能不断提升、功能不断扩展,应用领域也越来越广泛.目前,全世界范围内已掀起了无人机研制的热潮,共有57个国家研制和发展无人机,种类多达1000多种,其中,己成为无人机产品的有400多种,这些无人机主要应用于军事领域,并逐步向民用领域扩展.
有关无人机的研究,美国占据了制高点.迄今为止,美国己开发出高、中、低空,大、中、小型上百种无人机,覆盖了情报/监视/侦察、电子对抗、通信中继、攻击作战等任务领域,其无人机产品在研制水平、性能指标、技术成熟度方面都居于世界前列.我国无人机的研究起步于20世纪50年代,在90年代取得实质性进展,经过不懈努力,其性能不断提高,现己形成较为完善的无人机体系,各种类型、各种功能的无人机己投入使用.但从整体水平来看,我国无人机研究水平与美国和以色列等无人机强国相比差距比较明显.存在的问题主要有:(1)虽然我国无人机种类多,但重复投资、低水平重复、高端无人机发展依然较落后.(2)我国发动机研制基础较为薄弱,无人机在特定的高空低雷诺、大过载等飞行条件下,对发动机也提出了特殊的要求.(3)网络化通信问题.
战争对武器装备的高射程、高精度、零伤亡、高重复利用率以及隐蔽性等特征提出更高要求,无人机成为不可或缺的主战装备.随着无人机飞行平台和载荷设备的逐步完善,无人机在军事和民用领域的运用越来越多,特别是在军事领域中,无人机的起到的作用越来越大.随着科技的不断发展,现代化的战争环境日益复杂,仅仅依靠单架无人机将无法完成任务,多无人机在协同目标搜索、目标打击等方面具有单个无人机无可比拟的高效性和实时性,在信息化、网络化、体系化背景下,多机协同作战必将是未来战争中一种主要的作战方式,成为无人机发展的主流和趋势.
本专题得到了段海滨教授(北京航空航天大学自动化科学与电气工程学院)的大力支持.
·热点数据排行·
截至2015年5月25日,中国知网(CNKI)和Web of Science(WOS)的数据报告显示,以“无人驾驶飞机或无人机(Unmanned Aerial Vehicle,UAV)”为词条可以检索到的期刊文献分别为1565与2976条,本专题将相关数据按照:研究机构发文数、作者发文数、期刊发文数、被引用频次进行排行,结果如下.
无人机
·编者按·
无人驾驶飞机(Unmanned Aerial Vehicle,UAV),简称“无人机”,是具有自主程序控制、可进行无线遥控飞行的空中飞行器,可与遥控人员协作完成半自主控制,也可在无人驾驶、控制的状态下自主操作.无人机主要包括飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等,其相关技术涉及隐身、飞行控制、动力、数据链、发射与回收等方面.无人机系统的主要特点有:(1)机体灵活性好,体积小、重量轻.(2)可担负多载荷任务并进行远距离、长时间续航.(3)隐身性能好,生存能力强,费用低廉.(4)安全系数高,自主控制能力强.
第一架无人机是1917年由英国研制成功的.早期的无人机是在退役飞机基础上改装而来的,只能设置固定航线,无法人工干预和自主反应,主要用于炮兵辅助靶标演练.20世纪60年代以后,随着无线电、自动控制、计算机等技术的发展,无人机不再完全依赖地面控制,可以灵活执行多种任务,并应用于战争行动中.到20世纪90年代以来,信息化技术、卫星通信技术、高效空气动力技术等相关技术迅猛发展,无人机的性能不断提升、功能不断扩展,应用领域也越来越广泛.目前,全世界范围内已掀起了无人机研制的热潮,共有57个国家研制和发展无人机,种类多达1000多种,其中,己成为无人机产品的有400多种,这些无人机主要应用于军事领域,并逐步向民用领域扩展.
有关无人机的研究,美国占据了制高点.迄今为止,美国己开发出高、中、低空,大、中、小型上百种无人机,覆盖了情报/监视/侦察、电子对抗、通信中继、攻击作战等任务领域,其无人机产品在研制水平、性能指标、技术成熟度方面都居于世界前列.我国无人机的研究起步于20世纪50年代,在90年代取得实质性进展,经过不懈努力,其性能不断提高,现己形成较为完善的无人机体系,各种类型、各种功能的无人机己投入使用.但从整体水平来看,我国无人机研究水平与美国和以色列等无人机强国相比差距比较明显.存在的问题主要有:(1)虽然我国无人机种类多,但重复投资、低水平重复、高端无人机发展依然较落后.(2)我国发动机研制基础较为薄弱,无人机在特定的高空低雷诺、大过载等飞行条件下,对发动机也提出了特殊的要求.(3)网络化通信问题.
战争对武器装备的高射程、高精度、零伤亡、高重复利用率以及隐蔽性等特征提出更高要求,无人机成为不可或缺的主战装备.随着无人机飞行平台和载荷设备的逐步完善,无人机在军事和民用领域的运用越来越多,特别是在军事领域中,无人机的起到的作用越来越大.随着科技的不断发展,现代化的战争环境日益复杂,仅仅依靠单架无人机将无法完成任务,多无人机在协同目标搜索、目标打击等方面具有单个无人机无可比拟的高效性和实时性,在信息化、网络化、体系化背景下,多机协同作战必将是未来战争中一种主要的作战方式,成为无人机发展的主流和趋势.
本专题得到了段海滨教授(北京航空航天大学自动化科学与电气工程学院)的大力支持.
·热点数据排行·
截至2015年5月25日,中国知网(CNKI)和Web of Science(WOS)的数据报告显示,以“无人驾驶飞机或无人机(Unmanned Aerial Vehicle,UAV)”为词条可以检索到的期刊文献分别为1565与2976条,本专题将相关数据按照:研究机构发文数、作者发文数、期刊发文数、被引用频次进行排行,结果如下.

研究机构发文数量排名(CNKI)
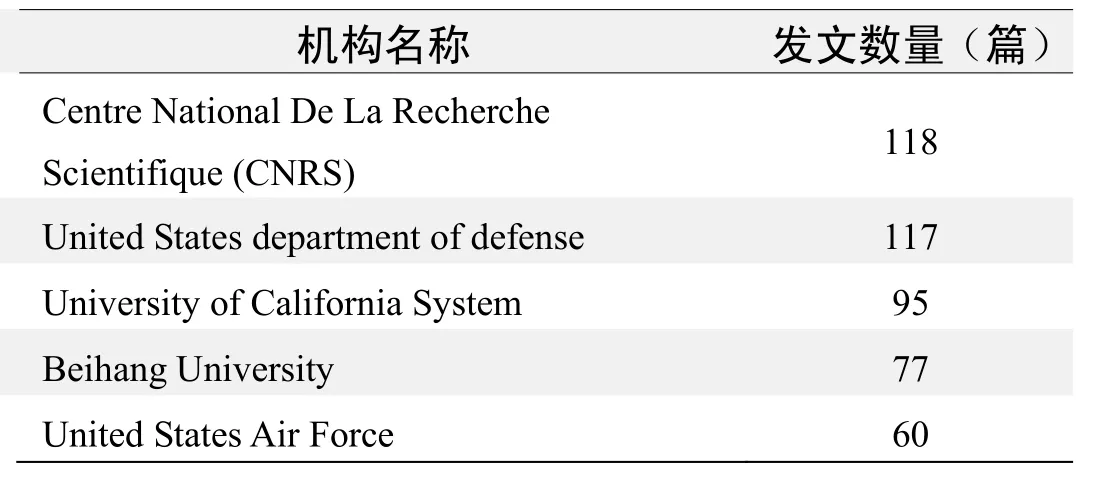
研究机构发文数量排名(WOS)
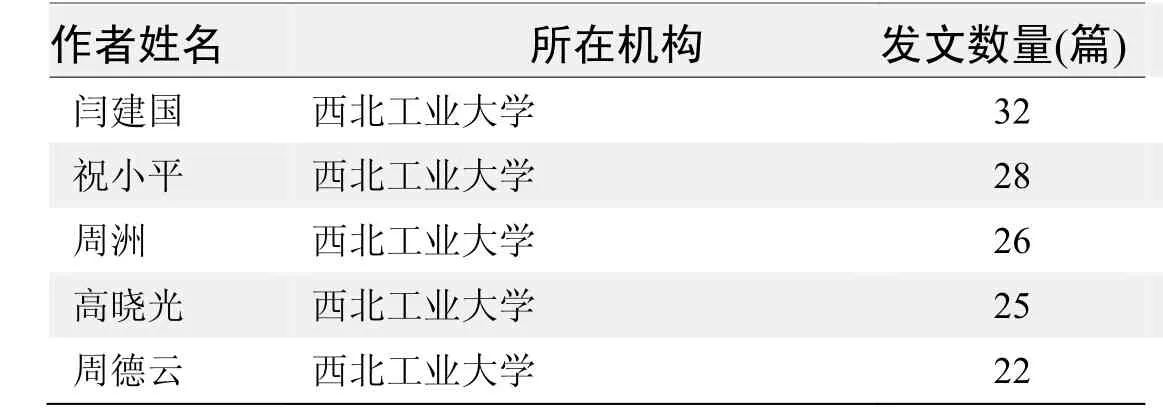
作者发文数量排名(CNKI)
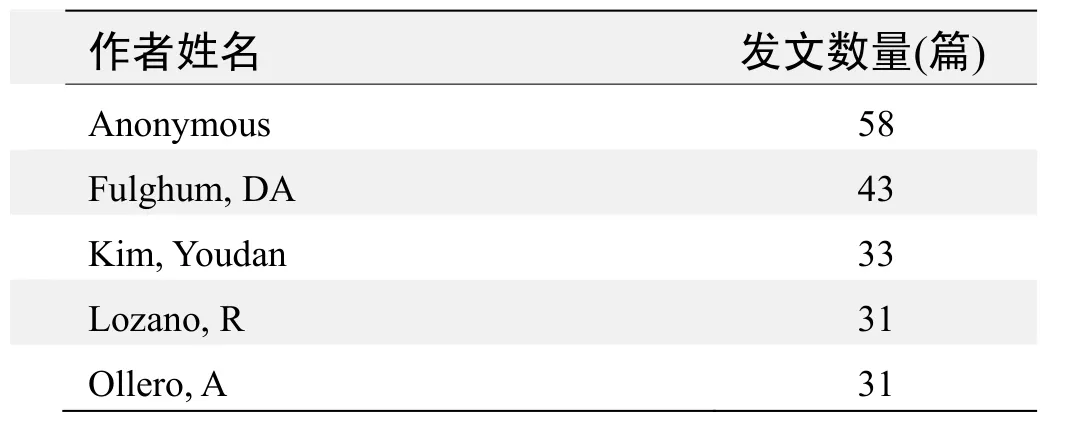
作者发文数量排名(WOS)
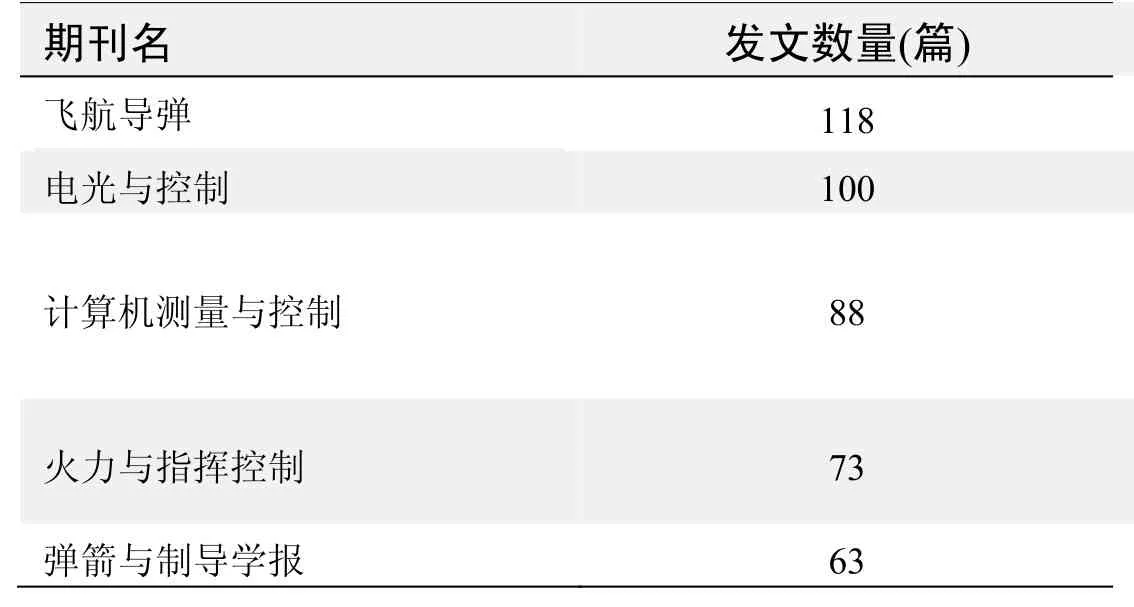
期刊发文数量排名(CNKI)
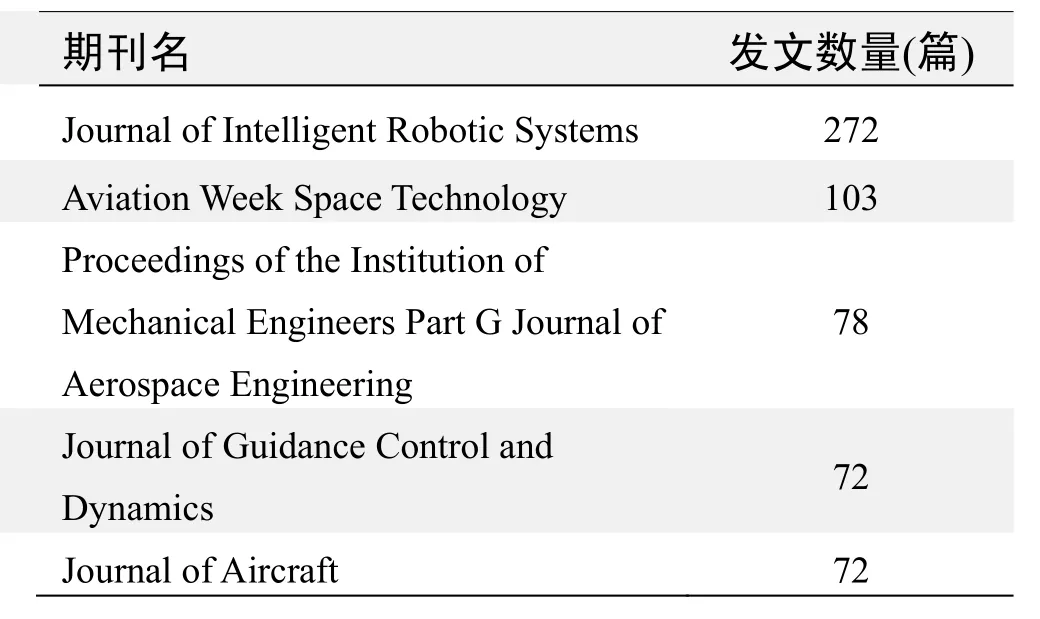
期刊发文数量排名(WOS)
根据中国知网(CNKI)数据报告,以无人机和无人驾驶飞机为词条可以检索到的高被引论文排行结果如下.
根据Web of Science统计数据,以无人机或无人驾驶飞机(Unmanned Aerial Vehicle,UAV)为词条可以检索到的高被引论文排行结果如下.

国外数据库高被引论文排行
·经典文献推荐·
基于Web of Science检索结果,利用Histcite软件选取LCS(Local Citation Score,本地引用次数)TOP 30文献作为节点进行分析,得到本领域推荐的经典文献如下.
Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring From an Unmanned Aerial Vehicle
Berni,Jose A.J; Zarco-Tejada,Pablo J; Suarez,Lola; et al.
来源出版物:IEEE Transactions on Geoscience and Remote Sensing,2009,47(3): 722-738
Assessment of unmanned aerial vehicles imagery for quantitative monitoring of wheat crop in small plots
Lelong,Camille C.D; Burger,Philippe; Jubelin,Guillaume; et al.
来源出版物:SENSORS,2008,8(5): 3557-3585联系邮箱:Lelong,Camille C.D; camille.lelong@cirad.fr
An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle(UAV)Imagery,Based on Structure from Motion(SfM)Point Clouds
Turner,Darren; Lucieer,Arko; Watson,Christopher
来源出版物:Remote Sensing,2012,4(5): 1392-1410
Acquisition,Orthorectification,and Object-based Classification of Unmanned Aerial Vehicle(UAV)Imagery for Rangeland Monitoring
Laliberte,Andrea S; Herrick,Jeffrey E; Rango,Albert; et al.
来源出版物:Photogrammetric Engineering and Remote Sensing,2010,76(6): 661-672
联系邮箱:Laliberte,Andrea S; alaliber@nmsu.edu
Point Cloud Generation from Aerial Image Data Acquired by a Quadrocopter Type Micro Unmanned Aerial Vehicle and a Digital Still Camera
Rosnell,Tomi; Honkavaara,Eija
来源出版物:SENSORS,2012,12(1): 453-480联系邮箱:Rosnell,Tomi; tomi.rosnell@fgi.fi
·推荐综述·
基于仿生智能的无人作战飞机控制技术发展新思路*
段海滨1,邵山2,苏丙未3,张雷4
1. 北京航空航天大学自动化科学与电气工程学院,飞行器控制一体化技术国防科技重点实验室,北京 100191
2. 沈阳飞机设计研究所,飞行控制部,沈阳 110035
3. 北京临近空间飞行器系统工程研究所,总体二室,北京 100076
4. 空军装备研究院,综合计划处,北京 100085
1引言
未来信息技术的一个必然发展趋势是智能化,而这种智能化实现的有效途径应是向自然界中多种形式的智能行为学习和模拟.自然界中的许多自适应优化现象不断给人以启示:生物体和自然生态系统可通过自身的演化就使许多在人类看起来高度复杂的优化问题得到完美的解决[1].近些年来,一些与经典的数学规划原理截然不同的、试图通过模拟自然生态系统机制以求解复杂问题的仿生智能(bio-inspired intelligence,BI)方法相继出现(如遗传算法、蚁群优化、微粒群优化、人工免疫、人工蜂群优化、文化进化、情感计算、DNA计算等),大大丰富了现代优化技术,也为那些传统最优化技术难以处理的组合优化问题提供了切实可行的解决方案[2].伴随着模拟自然与生物机理为特征的仿生智能计算时代的悄然兴起,一些仿生智能技术已在经典NP-C问题的求解和实际应用中显示出强大的生命力和进一步发展的潜力.
仿生智能技术具有较强的鲁棒性、优良的分布式计算机制、易于与其它方法相结合等优点.尽管大部分算法的严格理论基础尚未奠定[3],国内外的有关研究还处于实验探索和初步应用阶段,但是目前人们对仿生智能的研究已经拓展到了多个应用领域,由解决一维静态优化问题发展到解决多维动态组合优化问题,而且在仿生智能的硬件实现上也取得了很多突破性进展,从而使仿生智能展现出勃勃生机和广阔的发展前景.
无人作战飞机(unmanned combat aerial vehicle,UCAV)是一种有动力、可控制、能携带多种任务设备、执行多种任务,并能重复使用的无人作战飞行器,也是一种充分利用信息技术革命成果而发展的高性能信息化武器装备平台.无人作战飞机不仅可广泛用于通讯、气象、灾害监测、农业、地质、交通等多个民用领域,而且还可应用于智能监控和侦察、人工干扰、诱饵、网点通信、对敌防空压制、攻击机/巡航导弹防御、目标攻击、空空作战、边境巡逻等军事领域.
无人作战飞机系统的每个组成部分都是一个高技术的复杂子系统,而且各个组成部分相互之间具有很强的依赖性和协调性.因此,高技术密集性和“系统之系统(system of systems)”是无人作战飞机系统的两个重要特征.无人作战飞机不仅在民用方面大显身手,而其所具有的重量轻、低成本、零伤亡、机动性高、隐蔽性好和适应性强等特点,使其可适应长时间、大纵深作战,甚至可成为空中作战武器平台,支持海、陆、空、天、电五维一体的未来高技术战争.因此,由于无人作战飞机在未来军事斗争中具有突出的地位和作用,近几年来各军兵种对无人机系统的需求十分旺盛,目前已有多种型号的无人作战飞机列入了“杀手锏”装备发展计划.当前,以美国为首的西方各国都投入大量的人力、财力和物力进行无人作战飞机的研究,美、英、法、德等国相继抛出其无人机研究方案和技术验证报告.美国国防高级研究计划局分别与空军、海军联合研制X-45A空军无人作战飞机和X-47A海军无人作战飞机.美国国防部在2005年8月8日发布的无人机路线图《无人飞行器系统路线图2005—2030》中,把无人作战飞机置于优先发展的位置(图1)[4].2007年12月18日,美国国防部又发布了《无人飞行器系统路线图2007—2032》[5],与2005版的主要区别是对无人系统收集的数据进行更加完善的标记来改进作战指挥员之间侦查、监视和情报任务的传播方式.
瑞典、意大利、西班牙、希腊、瑞士、比利时和法国联合开发“神经元”无人机原型机.俄罗斯正加大无人作战飞机的投资和研发力度,在高空长航时战略侦察无人机、无人作战飞机和先进旋翼无人机等技术领域努力追赶美国.除了军事强国以外,一些第三世界国家和军事不发达国家也纷纷涉足无人机领域,在全球兴起一股研制无人作战飞机的热潮.但是我国目前现有的无人作战飞机装备和技术能力与世界先进国家相比在许多方面还有很大差距,以其军事应用为目的的新思想、新概念、新原理等基础性研究和应用研究还比较薄弱.
多无人作战飞机协同控制是无人作战飞机系统的核心内容和关键技术之一,其内容主要包括多机协同编队飞行及编队重构、态势评估及定位、任务分配、航路规划及重规划、通信问题、信息融合等方面[6].西方国家虽然在无人作战飞机的控制与实现技术上处于国际领先地位,但是他们在多无人作战飞机协同控制技术方面仍然存在很多研究空白,特别是采用仿生智能技术对多无人作战飞机协同控制问题进行研究,目前还处于起步阶段,因此,我们国家在这个时候对这一新兴的多学科交叉领域进行立项并深入研究显得十分必要.
目前在高智能化自主无人作战飞机控制方面存在的主要问题就是无人作战飞机的自主控制性问题,这也是目前困扰各国军工科研人员的头等难题,目前的芯片处理速度还不够快,软件尤其是高度自适应的软件也没有,导致目前无人作战飞机的智能化存在处理速度慢、可靠性低等瓶颈问题[7],总的来说,无人战机的高智能自主控制是一项艰巨的工程,只有在容错技术、行为智能和自适应推理系统(如神经网络)取得突破的前提下,无人作战飞机的智能化才能成为现实.而人工脑(artificial brain)、群体智能、仿生硬件等交叉学科领域的仿生智能新技术为无人作战飞机的高度智能化工程实现提供了可行的技术途径.此外,多无人作战飞机/无人作战车异构分布协同控制也是一个新兴的战略性研究领域.
仿生智能涌现过程中所体现出的动态性、自组织性、协同性、强鲁棒性等特点与复杂战场环境下对无人作战飞机控制的许多要求是相符的.本文在阐述仿生智能和无人作战飞机基本概念原理的基础上,从基于人工脑的无人作战飞机高智能化自主控制技术、基于群体智能理论的多无人作战飞机协同控制技术、基于群智能-Bayesian网络的复杂作战态势评估技术、基于仿生硬件的无人作战飞机高智能化自主控制技术、网络环境下基于元启发式(meta-heuristic)智能的多无人作战飞机/无人作战车异构分布协同控制等方面提出了无人作战飞机控制技术发展的新思路,这些技术对于极大提高作战任务的有效性以及无人作战飞机的生存概率具有重要的意义,同时也为无人作战平台的智能化、综合化和先进化提供新的突破方向和切实可行的技术途径.
2发展思路
图2给出了本论文所提出的基于仿生智能的无人作战飞机控制技术发展新思路框.
2.1基于人工脑的无人作战飞机高智能化自主控制技术
自主控制领域的人工脑主要是指发展类似人脑有认知能力的硬件的研究[8].人工脑融入了进化的思想,通过学习具有前期记忆的能力,可以对外界环境“认知”、“思考”、“决定”,形成对外界环境进行反应的“行为”,如图3所示.
人工脑结合人工智能及控制工程理论,从人工生命的观点,用计算机作为手段再现脑的思维决策过程,用“人工脑”控制器能够使无人作战飞机具有更高的智能化.人工脑采取了两方面的实现方式:类似生命的模型(life-like modeling)和社会模型(social modeling),包括传统的用于神经系统的学习模型,如人工神经网络.人工脑控制器主要完成两方面的功能:一是控制的功能,它控制无人作战飞机的各种动作;另一个是学习的功能,首先掌握基本的生存知识和技能,然后从外界环境中学习到相关的具体知识.当然,在控制无人作战飞机飞行运动过程中也要学习和获得知识.
人工脑无人作战飞机是在无人作战飞机控制系统中应用人工生命方面的理论、方法.这里所谓的“人工生命”的理论、方法和技术包括有关“人工脑”、“人工感官”、“人工器官”、“人工人”及“人工动物”的理论、方法和技术.人工脑无人作战飞机控制系统的基本体系结构见图4所示.
(1)基于人工脑的“智能控制器”:用计算机软、硬件或光机电材料研究、开发的各种模拟“自然脑”的脑模型作为未来无人作战飞机的控制核心.由于人工脑具有高水平的“人工思维智能”,所以基于人工脑的智能控制器的无人作战飞机具有很强的自主性.
(2)基于人工感官的反馈测量装置:人工感官是指模拟人或动物感觉器官的技术模型,基于人工感官的反馈装置是由多种智能传感器形成多媒体集成的人工感官系统,使得无人作战飞机具有相应的视觉、听觉,以及多感官信息融合、多模式数据挖掘等功能.
(3)基于人工器官的控制执行机构:人工器官是指模拟人体或动物的效应器官的技术模型,如人工手臂、人工腿脚、人工心脏等.无人作战飞机上安装上基于人工器官的执行机构,可以模拟人体的手脚、心脏的控制机理和调节功能,在执行人工脑控制器下达的命令过程中实现双向调节、协调控制.
2.2基于群体智能理论的多无人作战飞机协同控制技术
群体智能起源于科学家对群体性昆虫的观察和研究.从蜜蜂、蚂蚁等昆虫的成虫来看,它们的智商并不高,也没有谁在指挥,但它们却能协同工作,建起坚固、漂亮的巢穴,集中食物、抚养子女,依靠群体的能力,发挥了超出个体的智能,这就叫群体智能.在计算智能领域,群体智能是指任何启发于群居性昆虫群体和其它动物群体的集体行为而设计的算法和分布式问题解决装置.群体智能包括基于群体的智能进化算法,如遗传算法、蚁群优化法、粒子群优化等.如果把这种理论应用到无人驾驶飞机方面,比如每架无人作战飞机和导弹差不多,只装备低性能传感器和简单程序,但是让这种简易的无人作战飞机大量出动,相互协作,攻击目标.尽管每个传感器的探测能力比较低,但是群体最前面的无人作战飞机会近距离地探测目标,并立刻把探测到的信息传递给后面的无人作战飞机,后面的无人作战飞机就会对目标群起而攻之.对于有人机来说,这是极难对付的.人的头脑再机敏也无法同时对付10架、20架无人作战飞机的攻击,图5给出了群体智能的一般流程[1].
群体智能的特点和优点主要有[1]:
(1)群体中相互合作的个体是分布式的,这样更能够适应当前网络环境下的工作状态;
(2)没有中心的控制与数据,这样的系统更具有鲁棒性,不会由于某一个或者某几个个体的故障而影响整个问题的求解;
(3)可以不通过个体之间直接通信而是通过非直接通信进行合作,这样的系统具有更好的可扩充性;
(4)由于系统中个体的增加而增加的系统的通信开销在这里十分小.系统中每个个体的能力十分简单,这样每个个体的执行时间比较短,并且实现也比较简单,具有简单性.
群体智能的上述优点已使其成为信息处理领域的一个重要研究方向.群体智能以其分布性、简单性、灵活性和健壮性在组合优化问题、知识发现、通信网络、机器人等研究领域显示出的潜力和优势,使得群体智能成为无人作战飞机控制领域一个研究新热点.据媒体报道,美国五角大楼正在资助一个称为虫群战略(swarm strategy)的群体智能研究项目,研究内容主要涉及用群体智能等技术来指挥协调无人飞行器和地面车辆的运动.
群体智能理论在未来多无人作战飞机领域的研究和应用可主要集中在下述几个方面:
(1)基于分布式多智能体(agent)的多无人作战飞机协同控制;
(2)基于群体智能的多无人作战飞机的协同航路规划及其重规划;
(3)基于群体智能的多无人作战飞机编队控制及其重构;
(4)基于群体智能的多无人作战飞机对地攻击态势评估及协同目标分配;
(5)基于群体智能的多无人作战飞机协同目标攻击.
2.3基于群智能-Bayesian网络的复杂作战态势评估技术
由于复杂作战态势评估的输入数据和知识库数据都含有不确定性,解决它需要从不完全、不确定的或者不精确的知识和信息中做出推理,完成对当前战场态势的解释,所以,不确定、不完全的知识如何表示,如何推理是实现态势评估所必须完成的关键所在.基于概率知识表达的Bayesian网络成为人工智能中非精确知识表达与推理领域近十几年来研究的热点,Bayesian网络(bayesian network,BN)是一种用网络拓扑来表示客观随机事件的因果关系,以Bayesian概率理论为推理基础的处理不确定性因素的工具[9].Bayesian网络具有很严密的数学依据和理论基础,其思想符合人类思考、理解、学习和抽象的过程,而且其网络结构能够很好的响应结构的改变.在不确定性问题的处理上,Bayesian网络显得非常可靠和有效.Bayesian网络的计算模型化已经成为建设决策知识系统的一个重要部分,并被称为智能软件,广泛应用于“诊断与故障检测、医疗诊断、交通管理、军事目标自动识别、数据挖掘、作战意图自动估计、信息融合”等方面.在使用Bayesian网络进行事件推理之前,首先应确定Bayesian网络结构,即根据数据进行Bayesian网络学习.而Bayesian网络结构的确定是一个被证明了的NP-hard问题,使用启发式算法是解决NP-hard问题很好的途径.可将Bayesian算法和群智能优化结合,使用群智能元启发方式指导了搜索过程.
每群智能个体使用增量式的方法构筑网络,如图6所示,定义G0为初始状态,下标0表示G为空图[10],Gh表示当前状态有h条边,智能个体每一步就是从当前某状态Gh增加一条有向边 xi←xj到新的状态Gh+1,即Gh+1= Gh∪{xi←xj},在终止状态时,已找不到新的边使G所对应的Bayesian网络打分值更高.
上述思路有效地利用了问题域的启发信息,同时很好地发挥了智能群之间简单却有效的相互协作作用,适合解决大规模的Bayesian网络学习问题,从而实现无人作战飞机对复杂作战态势的有效评估.
2.4基于仿生硬件的无人作战飞机高智能化自主控制技术
仿生硬件早期也称为演化硬件(evolvable hardware,EHW)[3],是一种能根据外部环境的变化而自主地、动态地改变自身的结构和行为以适应其生存环境的硬件电路,它可以像生物一样具有硬件自适应、自组织和自修复特性.早在20世纪60年代,计算机之父Neumann[11]就提出了研制具有自繁殖与自修复能力通用机器的伟大构想.1992年,日本学者Garis[12]和瑞士联邦工学院的科学家们同时提出了将FPGA的结构可重配置特性与进化算法相结合的方案,标志着仿生硬件这一新兴研究领域的正式诞生.随后仿生硬件的研究得到了迅猛发展,很多国内外学者投身其中.同时,鉴于这一新兴研究领域可望在空间探索和国防应用中产生巨大影响,美国航空航天局(national aeronautics and space administration,NASA)和国防部(department of defense,DoD)对仿生硬件也表现出极大的兴趣[13],并于1999年召开了首届NASA/DoD仿生硬件专题讨论会,之后每年都要举行一次类似的讨论会,以促进仿生硬件的理论研究和应用开发,其研究目标是研制用于航天飞机、宇宙飞船、空间探测器、人造卫星、战略飞机、核潜艇的自适应与自修复电子系统和测控系统.
仿生群体智能在无人作战飞机控制方面的硬件实现需要应用到仿生硬件.仿生硬件模拟自然进化过程,将仿生优化算法的思想用于硬件物理结构的设计,特别是电子系统的设计.仿生硬件的硬件基础是可编程逻辑器件,可用如下公式来描述该定义[14]:仿生硬件(EHW)=仿生算法+可编程逻辑器件(FPGA).
通过对交替逻辑与路由结构之间的选择,可将FPGA视为软件与硬件系统之间联系的桥梁.利用目前流行的专业软件可快速地完成许多传统电路的设计,从而避免了传统电路设计中一些不必要的开支,并能快速纠正设计中所出现的一些错误.将电路配置到FPGA芯片上并切换到运行模式,而该模式的内在并行性可保证其高效的快速性能.FPGA技术加速了系统的开发研制进程,这项技术不仅适合于快速成型,而且还可替代中小规模生产中的逻辑门阵列.基于仿生智能的FPGA设计结构如图7所示[15].
由图7可见,该仿生硬件结构主要包括三个基本模块,即群体模块、发生器模块和评价模块.基于群体智能的无人作战飞机仿生硬件主要有如下特点.
(1)硬件自组织
基于仿生进化机理的仿生硬件无须人员干预,可实现硬件的自组织、自动化设计[16],能通过硬件自身的在线进化过程来获得具备预期功能的电路和无人作战飞机系统结构.利用仿生硬件能实现无人作战飞机硬件的标准化、可重用性、多用途以及通用化.
(2)硬件自适应
仿生硬件能满足复杂空战环境变化对硬件所要求的结构与功能自适应性,而目前传统的硬件电路无法实现这种结构自适应.无人作战飞机仿生硬件通过电路结构与参数的在线自适应调整,可有效解决如因作战损失、空战环境改变而引起无人作战飞机控制电路性能变化的问题,也可组成高速并行信息处理的自适应控制硬件系统.
(3)硬件自修复
目前无人作战飞机电子系统的结构越来越复杂,系统集成化是必然趋势.若高度集成化的无人作战飞机嵌入式电子系统在运行中出现故障,传统的容错与系统功能恢复方法难以实现,而且这种板级部件冗余容错系统结构复杂,其重构算法繁琐,硬件体积较大,成本较高,容错能力与系统可靠性有限;而仿生硬件可以弥补这些不足.
(4)执行速度快
无人作战飞机仿生硬件自适应的结果是新的硬件结构自身,因此,与其它基于软件的自适应系统相比,仿生硬件能得到显著的加速,而这一优点正是复杂作战环境下无人作战飞机控制系统所需要的.
2.5网络环境下基于元启发式智能的多无人作战飞机/无人作战车异构分布协同控制技术
元启发式智能主要是指一类通用型的启发式智能方法,这类方法的优化机理不过分依赖待解问题的结构信息,并可与各类控制方法进行有效结合,还可应用到众多类别的复杂组合优化问题中.目前元启发式智能已成为仿生智能交叉学科中一个非常活跃的前沿性研究领域.
无人作战车是一种有动力、可控制、能携带多种任务设备、执行多种任务,并能重复使用的地面移动式武装机器人[17].网络环境下多无人作战飞机/无人作战车异构分布协同控制技术是一个新的研究领域,该技术可以拓宽无人作战飞机和无人作战车的应用范围,提高其侦察、搜救及执行其它任务的效率.但是其在自主性、动态性、协同性等方面所表现出的高要求使得常规的协同控制方法已显得无能为力,而且该技术中渗透着许多强耦合、多约束的复杂控制与决策问题,而这些问题通常具有组合爆炸的搜索空间[18].常规的基于数学规划方法已显得无能为力,而基于元启发式智能的分布式协同控制方法则是一种有前途的发展方向和主要技术途径.
Chaimowicz等人[19]把多无人机/无人车异构协同形象地比喻成“空中牧羊犬”,并提出了一种基于机器视觉的“空中牧羊犬”分层递阶框架.图8给出了由美国海军研究院McCook[20]所绘制的一种多无人作战飞机/无人作战车异构协同掩护军队自动运输的任务想定.
由图8可见,多无人作战飞机/无人作战车异构分布协同控制的目的是控制和协调一组或几组无人作战飞机及无人作战车之间的行为,以执行和完成相互协调的特定任务.西方国家(特别是美国)虽然在多无人作战飞机/无人作战车异构分布协同控制与实现技术上处于国际领先地位,但他们在该领域仍然存在很多研究空白,特别是采用元启发式智能对多无人作战飞机/无人作战车异构分布协同控制问题进行研究,目前还处于起步阶段.
网络环境下多无人作战飞机/无人作战车异构分布协同控制中将利用元启发式智能的如下特点:
(1)在元启发式智能涌现的过程中,新的信息会很快被加入到环境中,而由于启发式信息更新机制的存在,旧的信息会不断被丢失,体现出一种动态特性;
(2)群体所表现出来的复杂行为是通过简单个体的交互表现出高度的智能,因此具有自组织性;
(3)由于许多元启发智能体在环境中感受散布的信息同时,没有中心的控制与数据,这使得不同的智能体会有不同的选择策略,具有分布并行性;
(4)最优方案是通过众多智能体的群体合作被搜索得到的,这一过程具有协同性;
(5)元启发式智能中的每个个体只能感知局部信息,个体的能力所遵循的规则非常简单,同时系统用于通信的开销较少,所以元启发式智能的实现简单,易于扩充;
(6)单个智能个体之间、群体之间以及与环境之间的相互作用、相互影响、相互协作,使智能群体可以完成非常复杂的任务,不会由于某一个或几个智能个体的故障而影响对整个问题的求解,这种适应性表现为元启发式智能的鲁棒性.
元启发式智能在网络环境下多无人作战飞机/无人作战车异构分布协同控制领域的研究和应用可主要集中在下述几个方面:
(1)基于元启发式智能的多无人作战飞机/无人作战车异构群集运动技术;
(2)基于元启发式智能的多无人作战飞机/无人作战车可视化导航技术;
(3)基于元启发式智能的多无人作战飞机/无人作战车“追逃”技术;
(4)基于元启发式智能的多无人作战飞机/无人作战车异构任务链技术.
3结束语
近年来,仿生智能技术有了惊人的快速发展,而无人作战飞机控制技术的设计与实现基本上仍遵循一种固定的模式.今天,当大家争相研制高性能无人作战飞机的时候,就感到常规的设计与实现技术难以满足新型无人作战飞机的发展需求.新型无人作战飞机强调要高、精、尖,特别在智能化方面有很高的要求,各种技术上也要创新,从而带来研制上的高难度和高风险.目前由于受到固有的技术思想的羁绊,使得研制出来的新型无人作战飞机中智能的成份并不多,难以实现跨越式发展.而仿生智能技术则可极大提高无人作战飞机的智能性、作战任务的有效性以及无人机的生存概率.本文所提出的发展思路可为新型无人作战飞机的智能化、综合化和先进化提供新的突破方向和可行的技术途径.
·高被引论文摘要·
被引频次:106
无人机航空遥感系统关键技术研究
晏磊,吕书强,赵红颖,等
简要分析了在我国发展无人机航空遥感系统的必要性和可行性,针对我国某型民用无人机,设计了无人机航空遥感信息平台的总体技术框架.在此基础上,对构建无人机航空遥感信息平台所涉及的关键技术进行了分析.指出高精度的组合导航、不同遥感传感器设备的集成、遥感数据机上处理与压缩以及遥感数据近实时传输等是实现无人机航空遥感信息平台的关键技术.
航空遥感;无人机;信息平台
来源出版物:武汉大学学报(工学版),2004,37(6): 67-70
被引频次:101
无人机遥感监测系统研究
崔红霞,林宗坚,孙杰
为了满足遥感应用对大比例尺、高分辨率的低空数字航空影像的需求,中国测绘科学研究院研制了无人机遥感监测系统UAVRS II.该系统运用了以下关键技术:①以面阵CCD数码相机、单轴稳定平台作为机载遥感设备;②研制了遥感设备控制系统,依据实时的传感器参数,控制遥感设备的姿态和曝光间隔;③地面监控系统是该遥感系统的重要组成部分,集3S技术和相关技术于一体;④利用一个两步法的相机检校方法对数字相机实施了标定;⑤利用大倾角空中三角测量、半自动匹配等技术开发了影像后处理软件.实验结果表明以该系统实施的航空摄影和数据后处理获得了预期的效果.
无人机;3S集成技术;遥感设备自动控制系统;大倾角空中三角测量;相机检校
来源出版物:测绘通报,2005,(5): 11-14
被引频次:96
无人机的发展现状与展望
淳于江民,张珩
回顾了无人机的发展历程,并阐述了无人机的系统结构、分类、用途及其关键技术,就主要机型做了简要的介绍,最后对无人机发展中亟待解决的问题及趋势做了详细的分析.
无人机;发展现状;趋势
来源出版物:飞航导弹,2005,(2): 23-27
被引频次:96
一种无人机路径规划算法研究
符小卫,高晓光
指出了飞行器航迹规划与路径规划的区别;提出了一种给定威胁分布下的无人机路径规划算法.根据威胁分布情况构造无人机可能飞行的航路集,用voronoi图表示出来,采用Dijkstra算法搜索威胁分布图,求解粗略最短路径.在粗略最短路径的基础上,应用三次样条曲线和序列二次规划的方法求解最优路径.用Matlab进行仿真验证,证明了算法的有效性.
无人机;路径规划;voronoi图;Dijkstra算法;三次样条曲线;序列二次规划
来源出版物:系统仿真学报,2004,16(1): 20-34
被引频次:94
国外无人机自主飞行控制研究
唐强,朱志强,王建元
无人机自主飞行控制的研究属于飞行控制的前沿问题,其目的是实现无人机的自主飞行控制、决策和管理.由于其高度的复杂性和智能性,在理论和工程实际上尚处于起步阶段.结合近年来国外的发展状况和一些主要的研究成果,对无人机的自主飞行控制的研究进行了概述.首先介绍了自主控制的概念,然后分别探讨了无人机自主飞行控制中几个相关的关键问题,主要包括飞行中规划与重规划,自主飞行控制的分层结构,以及无人机自主着陆等问题,最后对未来的发展方向和面临的挑战进行了展望.
无人机;自主飞行控制;规划;分层结构;自主着陆
来源出版物:系统工程与电子技术,2004,26(3): 418-422
被引频次:79
非量测数码相机的畸变差检测研究
崔红霞,孙杰,林宗坚,等
本文主要研究利用数字畸变模型和附加参数的光束法平差对非量测数码相机进行内方位元素和畸变差的测定.分别运用两种检校方法对UAVRS Ⅱ无人机遥感系统机载非量测数码相机进行检校实验,并采用统一比例尺的方法进行精度比较.实验结果表明两种方法检校精度接近,证明了该面阵数码相机的畸变基本符合系统畸变规律,只存在极少量的随机畸变,也进一步证明了利用数字畸变模型纠正数码相机畸变差的可行性.
相机检校;畸变;无人机;光束法平差
来源出版物:测绘科学,2005,30(1): 105-112联系邮箱:崔红霞,lnchx316@sohu.com
被引频次:79
基于双圆特征的无人机着陆位置姿态视觉测量方法
张广军,周富强
提出了一种无人机自主着陆位置姿态的单目视觉测量方法,建立了机载摄像机的运动和投影模型.设计了新型双圆图案着陆平面靶标,采用双圆的8个公切点,产生21个具有透视投影不变性的特征点,并提出了在复杂背景中全自动双圆特征的图像提取新方法及标记特征点的方案,实验表明,768×576像素大小的图像,特征提取及标记耗时小于9 ms.仿真试验表明,摄像机距离靶标10 m左右,噪声偏差达到1.5像素时,单轴位置RMS误差小于6 cm,单轴姿态RMS误差小于0.7°,所提出的算法具有很强的抗噪声能力,能够满足无人机自主着陆位置姿态实时测量的要求.
无人机;位置;姿态;特征点;透视投影
来源出版物:航空学报,2005,26(3): 344-348
被引频次:70
基于遗传算法的无人机航路规划
马云红,周德云
无人机在执行任务时需要装载根据战场环境预先规划好的最优路径,路径的优劣直接决定了无人机的作战效率.采用遗传算法进行无人机路径优化,算法利用极坐标描述威胁位置和航路点,将路径编码由二维缩减至一维,降低了搜索空间,提高了优化效率.对算法进行了相应的仿真,仿真结果表明,编码方式大大提高了优化效率,得到的航路有效地规避了威胁.
无人机;航路规划;遗传算法;编码方式
来源出版物:电光与控制,2005,12(5): 24-27
被引频次:67
无人机发展现状及相关技术
邹湘伏,何清华,贺继林
较详细地论述了无人机的发展现状以及无人机技术要素,并从无人机技术发展的角度分析了无人机的发展趋势.
无人机;无人机技术;发展趋势
来源出版物:飞航导弹,2006(10): 9-14
被引频次:60
基于VORONOI图的无人机航迹规划
赵文婷,彭俊毅
无人机的航迹规划对发挥无人机的自主飞行和执行任务中起着至关重要的作用.在分析VORONOI图的性质基础上,以无人机仿真环境中作战想定与任务规划成员为背景研究基于 VORONOI图的航迹规划技术.重点讨论了如何根据威胁分布的VORONOI图建模,计算航路代价,航迹搜索和航迹优化.最后总结了算法的优缺点,提出算法的改进新方法.
无人机;VORONOI图;航迹规划;航路代价
来源出版物:系统仿真学报,2006,18(S2): 159-165
被引频次:171
Decentralized overlapping control of a formation of unmanned aerial vehicles
Stipanovic,DM; Inalhan,G; Teo,R; et al.
来源出版物:Automatica,2004,40(8): 1285-1296
被引频次:146
Visually guided landing of an unmanned aerial vehicle
Saripalli,S; Montgomery,JF; Sukhatme,GS; et al.
来源出版物:IEEE Transactions on Robotics and Automation,2003,19(3): 371-380
被引频次:138
Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring From an Unmanned Aerial Vehicle
Berni,Jose A.J; Zarco-Tejada,Pablo J; Suarez,Lola; et al.
被引频次:96
Evolutionary algorithm based offline/online path planner for UAV navigation
Nikolos,IK; Valavanis,KP; Tsourveloudis,NC; et al.
来源出版物:IEEE Transactions on Systems Man and Cybernetics Part B-Cybernetics,2003,33(6): 898-912
被引频次:96
A practical visual servo control for an unmanned aerial vehicle
Guenard,Nicolas; Hamel,Tarek; Mahony,Robert
来源出版物:IEEE Transactions on Robotics,2008,24(2): 331-340联系邮箱:Guenard,Nicolas; guenardn@zoe.cea.fr
被引频次:84
Imaging from an unmanned aerial vehicle: agricultural surveillance and decision support
Herwitz,SR; Johnson,LF; Dunagan,SE; et al.
来源出版物:Computers and Electronics in Agriculture,2004,44(1): 49-61联系邮箱:Herwitz,SR; sherwitz@mail.arc.nasa.gov
被引频次:72
Output Feedback Control of a Quadrotor UAV Using Neural Networks
Dierks,Travis; Jagannathan,Sarangapani
来源出版物:IEEE Transactions on Neural Networks,2010,21(1): 50-66
被引频次:68
Texture and Scale in Object-Based Analysis of Subdecimeter Resolution Unmanned Aerial Vehicle(UAV)Imagery
Laliberte,Andrea S; Rango,Albert
来源出版物:IEEE Transactions on Geoscience and Remote Sensing,2009,47(3): 761-770联系邮箱:Laliberte,AS; alaliber@nmsu.edu
被引频次:62
A Survey of Motion Planning Algorithms from the Perspective of Autonomous UAV Guidance
Goerzen,C; Kong,Z; Mettler,B
来源出版物:Journal of Intelligent & Robotic Systems,2010,57(1-4): 65-100
被引频次:55
Assessment of unmanned aerial vehicles imagery for quantitative monitoring of wheat crop in small plots
Lelong,Camille C.D; Burger,Philippe; Jubelin,Guillaume; et al.
·推荐论文摘要·
应急响应中PixelGrid无人机遥感数据处理的关键技术与应用
贾娇,艾海滨,张力,等
随着数字摄影测量技术的发展,低空无人机摄影方式得到了很大的重视.在灾害应急领域,可帮助获得受灾地区高质量的正射影像图、DEM和全景图等产品,及时获取灾区的准确信息,为救灾减灾提供方便.考虑到无人机摄影不同于常规摄影方式,需要在提高大量数据的处理速度的前提下,保证处理成果的精度符合应用要求.以高分辨率遥感影像一体化测图系统(Pixel Grid)为依托,介绍对灾情发生后获得的影像数据进行快速处理的相关方法、实现技术及应用.
数字摄影测量;无人机;应急响应;Pixel Grid;数据处理
来源出版物:测绘通报,2013,(5): 62-65
基于启发式自适应离散差分进化算法的多UCAV协同干扰空战决策
薛羽,庄毅,张友益,等
研究了多无人作战飞机(UCAV)协同干扰空战决策(MUCJAD)问题,在干扰效能评估指标量化方法的基础上为该问题建立了优化模型.为有效求解该模型,提出一种启发式自适应离散差分进化(H-SDDE)算法.在H-SDDE算法中,设计了包含4种候选解产生策略的候选策略池,引入了候选解产生策略及其参数的自适应学习过程.此外,结合实际问题为算法设计了基于威胁度的扩展型整数编码方案、基于威胁度的启发式个体调整操作、基于约束满足的个体修复操作.在12个测试实例上进行了仿真验证,结果表明,H-SDDE算法与其他同类算法相比在求解质量和求解速度上具有明显优势,能够更好地发挥多UCAV协同干扰整体效果.
无人机;协同干扰;决策;启发式算法;自适应;优化;差分进化
来源出版物:航空学报,2013,34(2): 343-351联系邮箱:庄毅,zhuangyi@nuaa.edu.cn
2012年世界军用无人机发展动向及评述
张翼麟,张绍芳,李鹏飞
根据2012年世界主要国家和地区军用无人机的发展,梳理总结了美国、欧洲、以色列、俄罗斯、印度等国家和地区军用无人机的发展动向,并在此基础上对2012年全球军用无人机的发展特点进行了简要评述.
无人机;路线图;X-47B;神经元无人机;美国
来源出版物:飞航导弹,2013(7): 69-72
多无人机分布式协同异构任务分配
邸斌,周锐,丁全心
研究异构无人机对不同类型目标执行侦察、打击和评估任务的协同任务分配问题.采用信息论中熵的变化量对侦察与评估任务中所获取的信息量进行度量,将无人机对不同类型目标的打击能力抽象为对目标的毁伤概率,并考虑各个任务之间的相互关联,建立异构多无人机协同任务分配模型.设计了基于相邻局部通信的分布式拍卖算法,实现了多无人机协同任务分配问题的优化求解.仿真结果表明了所建模型的合理性和求解方法的有效性.
无人机;任务分配;分布式拍卖;信息论;熵
来源出版物:控制与决策,2013,28(2): 274-278
基于辅助信息的无人机图像批处理三维重建方法
郭复胜,高伟
随着我国低空空域对民用的开放,无人机(Unmanned aerial vehicles,UAVs)的应用将是一个巨大的潜在市场.目前,如何对轻便的无人机获取的图像进行全自动处理,是一项急需解决的瓶颈技术.本文将探索如何将近年来在视频、图像领域获得巨大成功的三维重建技术应用到无人机图像处理领域,对无人机图像进行全自动的大场景三维重建.本文首先给出了经典增量式三维重建方法Bundler在无人机图像处理中存在的问题,然后通过分析无人机图像的辅助信息的特点,提出了一种基于批处理重建(Batch reconstruction)框架下的鲁棒无人机图像三维重建方法.多组无人机图像三维重建实验表明:本文提出的方法在算法鲁棒性、三维重建效率与精度等方面都具有很好的结果.
三维重建;无人机;批处理重建;辅助信息
来源出版物:自动化学报,2013,39(6): 834-845
基于仿鹰眼视觉的无人机自主空中加油
段海滨,张奇夫,邓亦敏,等
自主空中加油是提高无人机作战能力的重要技术支撑,而鹰在所有的动物中以视觉最为敏锐而著称.针对无人机自主空中加油中的精确对接需求,设计了基于仿鹰眼视觉原理的无人受油机视觉测量方法及半物理试验平台.采用鹰眼视觉注意机制提取虚拟视景中的兴趣区域,剔除噪声和干扰.在对受油机上的颜色标志点进行识别的基础上采用P3P算法,对加油机和受油机之间的相对位姿进行精确估计,并设计了基于比例-积分-微分的硬式加油伸缩管控制律.基于上述技术,在实验室环境下设计开发了无人机自主空中加油半物理仿真平台.实验结果表明:所设计的仿鹰眼视觉测量方法和自主控制律能满足无人机自主空中加油的性能要求,具有较强的实时性、准确性和鲁棒性.
无人机;自主空中加油;鹰眼视觉;位姿估计
来源出版物:仪器仪表学报,2014,35(7): 1451-1458联系邮箱:段海滨,hbduan@buaa.edu.cn
无人机遥感系统的研究进展与应用前景
李德仁,李明
阐述了无人机遥感兴起的背景.从无人飞行平台、飞行姿态控制与导航、数据传输与存储、数据处理、传感器技术、空域使用政策等方面探讨了发展无人机遥感系统的基础、问题、研究进展和趋势.通过描述无人机遥感系统在大量相关行业领域的应用与实践,点出了发展无人机遥感系统的必要性与意义所在.最后,从科技、政策等方面给出了发展无人机遥感技术和产业的建议.
无人机;无人机遥感;无人机遥感系统
来源出版物:武汉大学学报(信息科学版),2014,39(5): 505-513联系邮箱:李明,lisouming@whu.edu.cn
无人机多侦察载荷协同侦察效能评估
张旺,申洋,陈伟
多侦察载荷协同侦察已经成为当前和未来无人侦察机主流工作方式.根据电子信号侦察设备、合成孔径雷达(SAR)和长焦距倾斜CCD相机3种机载侦察载荷的侦察特点,分析了影响机载多侦察载荷协同侦察效能的因素和指标,在各分项评估模型的基础上采用线性加权算法建立了无人机多侦察载荷的协同侦察效能模型.最后分别在不同强度的电子对抗环境下,对以上3种机载侦察载荷两两协同的侦察效能进行了计算和分析,验证了模型的可用性.
无人机;侦察载荷;协同侦察效能;效能评估
来源出版物:电光与控制,2014,21(3):1-4
侦察打击一体化无人机关键技术及其发展趋势分析
冯卉,毛红保,吴天爱
针对侦察打击一体化无人机的“发现即摧毁”能力,概述了侦察打击一体化无人机的发展现状;分析了其目标搜索与任务规划、机载武器投放规划、攻击航迹快速生成、一站多机控制等关键技术;预测了侦察打击一体化无人机未来发展趋势;提出了侦察打击一体化无人机基于体系作战、实战检验和完善情报体系的发展建议.
无人机;侦察打击一体化;关键技术
来源出版物:飞航导弹,2014,(3): 42-46
基于改进快速扩展随机树方法的隐身无人机突防航迹规划
莫松,黄俊,郑征,等
针对隐身无人机在日趋严密的雷达防御系统下的生存问题,提出了基于改进快速扩展随机树的隐身突防航迹规划方法.本文首先对隐身突防航迹规划中无人机的动态雷达散射截面积和雷达的发现准则这两个关键问题进行了分析和建模,然后针对现有算法在解决隐身飞机航迹规划问题时的不足,设计了改进快速扩展随机树算法,将无人机的雷达散射截面积随姿态变化的情况考虑到新节点生成中,并且结合滚动时域策略计算时域范围内所有节点的瞬时发现概率均值,以判断新节点可行性.仿真结果和对比研究表明,算法的改进策略能够处理隐身突防航迹规划的两个特性,并且可在复杂环境下快速生成更优的突防路径.
无人机(UAV);路径规划;快速扩展随机树(RRT);雷达散射截面(RCS)
来源出版物:控制理论与应用,2014,31(3): 375-385联系邮箱:莫松,neomo112@gmail.com
无人机自动防撞冲突检测与优化控制方法
许云红,周锐,夏洁,等
研究了无人机防撞冲突检测与威胁级别评估方法,建立了航向角控制、速度控制、高度控制以及航向角与速度组合控制等多种不同的防撞控制策略;建立了自动防撞多目标代价函数模型以及多目标最优决策方法.仿真结果证明了该方法的有效性和较好的实用性.
无人机;自动防撞;威胁评估;最优决策
来源出版物:电光与控制,2014,21(1): 1-6
轻小型无人机航摄技术现状及发展趋势
毕凯,李英成,丁晓波,等
轻小型无人机因其获取影像机动灵活、影像分辨率高、成本低等优势,成为传统航空摄影测量手段的有效补充,已在测绘地理信息、防灾减灾、反恐维稳、农业估产、水利电力工程建设、铁路、公路带状选线工程,以及西部1∶5万地形图空白区测图工程、远离大陆的岛礁测绘等诸多领域发挥了积极作用.本文针对当前民用轻小型无人机航摄系统开展航空摄影和影像摄影测量处理的情况,从航空摄影航线设计、搭载传感器情况、航摄质量快速检查、像控测量工作及影像摄影测量处理等方面阐述了现阶段民用轻小型无人机航空摄影及影像摄影测量处理的现状,分析了现阶段轻小型无人机航摄技术存在的问题,对下一阶段轻小型无人机航摄技术的发展提出了建议.
无人机;非量测型相机;小像幅航空摄影;航线设计;质量检查;像控测量;发展趋势
来源出版物:测绘通报,2015(3): 27-31联系邮箱:毕凯,24677958@qq.com
基于Laguerre图的自优化A-Star无人机航路规划算法
魏瑞轩,许卓凡,王树磊,等
为了降低无人机航路规划的运算量,减少规划时间,确保算法对于任意形状威胁区域和地形的适应性以及所规划航路的准确性,提出了一种新颖的LA-Star算法用于无人机航路规划.首先把威胁区域和禁飞区域简化为圆形,利用Laguerre图算法进行航路预规划,在此基础上简化二次规划空间的范围,之后恢复威胁区域和禁飞区域的真实形状,在简化后的规划空间内使用改进A-Star算法实施二次航路规划,最后对生成的航路进行自优化处理.仿真结果证明了LA-Star算法满足航路规划的实时性和准确性要求.
无人机;航路规划;LA-Star算法;Laguerre图;A-Star算法
来源出版物:系统工程与电子技术,2015,37(3): 577-582
无人机编队机动飞行时的队形保持反馈控制
邵壮,祝小平,周洲,等
为提高编队大机动时的队形保持能力,采用虚拟结构编队方法,基于李稚普诺夫直接法设计独立的非线性队形保持控制器,并在此基础上采用非线性模型预侧控制方法设计含队形反馈的编队轨迹跟踪器.通过在代价函数中引入队形误差代价来实现队形反馈控制策略,并采用动态参数实现编队队形保持和沿参考轨迹飞行之间的自适应切换,各无人机通过滚动求解有限时域优化问题得到虚拟结构的控制指令.仿真结果表明,相较于无队形反馈的情况,所设计的含队形反馈轨迹跟踪器能够显著地降低编队大机动时的队形保持误差.
无人机;编队飞行;队形反馈;虚拟结构;非线性模型预侧控制
来源出版物:西北工业大学学报,2015,33(1): 26-32
无人机机载激光雷达系统航带拼接方法研究
赵大伟,裴海龙,丁洁,等
为了减少机载激光雷达(Li DAR)系统中系统误差和随机误差造成的航带间三维(3D)空间偏移,提高数据精度,选取基于数据驱动的“六参数”航带平差方法,实现无人机机载激光雷达系统的航带拼接.在分析了机载激光扫描系统的数据特征的基础上利用改进的3D正态分布变换(3D-NDT)进行航带配准,得到航带间的变换关系参数.通过具体实验对常见的迭代最近点(ICP)算法与3D正态分布变换算法进行比较,验证了该方法实现航带拼接,具有速度快、精度高、稳健性好等特点,非常适合于工程实际应用.
激光光学;激光雷达;航带平差;正态分布变换;点云配准
来源出版物:中国激光,2015,42(1): 0114002联系邮箱:裴海龙,auhlpei@scut.edu.cn
无人机航迹角的非线性增益递归滑模控制
孙秀霞,刘希,徐嵩,等
针对固定翼无人机(unmanned aerial vehicles,UAVs)自主着陆过程中的航迹角跟踪控制问题,提出了一种非线性增益递归滑模控制方法.通过引入一个新的非线性增益函数,并设计含有积分项的递归滑模面,在保证航迹角跟踪控制精度的同时有效改善了控制系统的动态品质,克服了常规动态面控制(dynamic surface control,DSC)方法对于量测噪声敏感、容易引起执行器饱和的缺点.理论证明了所得航迹角跟踪控制系统所有状态半全局一致最终有界,航迹角跟踪误差可以收敛至原点的指定小邻域,且对于非时变干扰和常值指令不存在稳态跟踪误差.在YF-22模型机上进行的数值仿真验证了本文方法的优越性.
航迹角控制;非线性增益;滑模控制;自主着陆
来源出版物:系统科学与电子技术,2015,37(2): 379-384
Lightweight unmanned aerial vehicles will revolutionize spatial ecology
Anderson,Karen; Gaston,Kevin J
来源出版物:Frontiers in Ecology and the Environment,2013,11(3): 138-146
联系邮箱:Anderson,Karen; karen.anderson@exeter.ac.uk
Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning
Roberge,Vincent; Tarbouchi,Mohammed; Labonte,Gilles
来源出版物:IEEE Transactions on Industrial Informatics,2013,9(1): 132-141联系邮箱:Roberge,Vincent;vincent.roberge@rmc.ca
Hybrid Particle Swarm Optimization and Genetic Algorithm for Multi-UAV Formation Reconfiguration
Duan,Haibin; Luo,Qinan; Ma,Guanjun; et al.
来源出版物:IEEE Computational Intelligence Magazine,2013,8(3): 16-27
Unmanned aerial vehicles as innovative remote sensing platforms for high-resolution infrared imagery to support restoration monitoring in cut-over bogs
Knoth,Christian; Klein,Birte; Prinz,Torsten; et al.
来源出版物:Applied Vegetation Science,2013,16(3): 509-517联系邮箱:Kleinebecker,T; kleinebecker@uni-muenster.de
Using Unmanned Aerial Vehicles(UAV)for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments
Mancini,Francesco; Dubbini,Marco; Gattelli,Mario; et al.
来源出版物:Remote Sensing,2013,5(12): 6880-6898联系邮箱:Mancini,Francesco; f.mancini@poliba.it
Direct Georeferencing of Ultrahigh-Resolution UAV Imagery
Turner,Darren; Lucieer,Arko; Wallace,Luke
来源出版物:IEEE Transactions on Geoscience and Remote Sensing,2014,52(5): 2738-2745
联系邮箱:Turner,Darren; Darren.Turner@utas.edu.au
Automatic Car Counting Method for Unmanned Aerial Vehicle Images
Moranduzzo,Thomas; Melgani,Farid
来源出版物:IEEE Transactions on Geoscience and Remote Sensing,2014,52(3): 1635-1647
联系邮箱:Moranduzzo,Thomas; moranduzzo@disi.unitn.it
A Novel UAV-Based Ultra-Light Weight Spectrometer for Field Spectroscopy
Burkart,Andreas; Cogliati,Sergio; Schickling,Anke; et al.
来源出版物:IEEE Sensors Journal,2014,14(1): 62-67联系邮箱:Burkart,Andreas; an.burkart@fz-juelich.de
High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles
Immerzeel,WW; Kraaijenbrink,PDA; Shea,JM; et al.
来源出版物:Remote Sensing of Environment,2014,150: 93-103联系邮箱:Immerzeel,WW; w.w.immerzeel@uu.nl
A Lightweight Hyperspectral Mapping System and Photogrammetric Processing Chain for Unmanned Aerial Vehicles
Suomalainen,Juha; Anders,Niels; Iqbal,Shahzad; et al.
来源出版物:Remote Sensing,2014,6(11): 11013-11030联系邮箱:Suomalainen,Juha; juha.suomalainen@wur.nl
UAV Remote Sensing for Urban Vegetation Mapping Using Random Forest and Texture Analysis
Feng,Quanlong; Liu,Jiantao; Gong,Jianhua
来源出版物:Remote Sensing,2015,7(1): 1074-1094联系邮箱:Gong,Jianhua; gongjh@radi.ac.cn
UAV circumnavigating an unknown target under a GPS-denied environment with range-only measurements
Cao,Yongcan
来源出版物:Automatica,2015,55: 150-158联系邮箱:CAO Yong-can; yongcan.cao@gmail.com
Survey on the novel hybrid aquatic-aerial amphibious aircraft: Aquatic unmanned aerial vehicle(AquaUAV)
Yang,Xingbang; Wang,Tianmiao; Liang,Jianhong
来源出版物:Progress in Aerospace Sciences,2015,74: 131-151联系邮箱:Yang,Xingbang; xingbang1987@163.com
Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles(UAVs)
Pajares,Gonzalo
来源出版物:Photogrammetric Engineering and Remote Sensing,2015,81(4): 281-329
联系邮箱:Pajares,Gonzalo; pajares@ucm.es
来源出版物:Automatica,2015,53: 111-119联系邮箱:Abdessameud,Abdelkader; aabdess@uwo.ca
编辑:卫夏雯
Two critical limitations for using current satellite sensors in real-time crop management are the lack of imagery with optimum spatial and spectral resolutions and an unfavorable revisit time for most crop stress-detection applications. Alternatives based on manned airborne platforms are lacking due to their high operational costs. A fundamental requirement for providing useful remote sensing products in agriculture is the capacity to combine high spatial resolution and quick turnaround times. Remote sensing sensors placed on unmanned aerial vehicles(UAVs)could fill this gap,providing low-cost approaches to meet the critical requirements of spatial,spectral,and temporal resolutions. This paper demonstrates the ability to generate quantitative remote sensing products by means of a helicopter-based UAV equipped with inexpensive thermal and narrowband multispectral imaging sensors. During summer of 2007,the platform was flown over agricultural fields,obtaining thermal imagery in the 7.5-13 μm region(40 cm resolution)and narrowband multispectral imagery in the 400-800 nm spectral region(20 cm resolution). Surface reflectance and temperature imagery were obtained,after atmospheric corrections with MODTRAN. Biophysical parameters were estimated using vegetation indices,namely normalized difference vegetation index,transformed chlorophyll absorption in reflectance index/optimized soil-adjusted vegetation index,and photochemical reflectance index(PRI),coupled with SAILH and FLIGHT models. As a result,the image products of leaf area index,chlorophyll content(C(ab)),and water stress detection from PRI index and canopy temperature were produced and successfully validated. This paper demonstrates that results obtained with a low-cost UAV system for agricultural applications yielded comparable estimations,if not better,than those obtained by traditional manned airborne sensors.
Multispectral; narrowband; radiative transfer modeling; remote sensing; stress detection; thermal; unmanned aerial system(UAS); unmanned aerial vehicles(UAVs)
This paper outlines how light Unmanned Aerial Vehicles(UAV)can be used in remote sensing for precision farming. It focuses on the combination of simple digital photographic cameras with spectral filters,designed to provide multispectral images in the visible and near-infrared domains. In 2005,these instruments were fitted to powered glider and parachute,and flown at six dates staggered over the crop season. We monitored ten varieties of wheat,grown in trial micro-plots in the South-West of France. For each date,we acquired multiple views in four spectral bands corresponding to blue,green,red,and near-infrared. We then performed accurate corrections of image vignetting,geometric distortions,and radiometric bidirectional effects. Afterwards,we derived for each experimental micro-plot several vegetation indexes relevant for vegetation analyses. Finally,we sought relationships between these indexes and field-measured biophysicalparameters,both generic and date-specific. Therefore,we established a robust and stable generic relationship between,in one hand,leaf area index and NDVI and,in the other hand,nitrogen uptake and GNDVI. Due to a high amount of noise in the data,it was not possible to obtain a more accurate model for each date independently. A validation protocol showed that we could expect a precision level of 15% in the biophysical parameters estimation while using these relationships.
imagery; multispectral; precision farming; UAV
Unmanned Aerial Vehicles(UAVs)are an exciting new remote sensing tool capable of acquiring high resolution spatial data. Remote sensing with UAVs has the potential to provide imagery at an unprecedented spatial and temporal resolution. The small footprint of UAV imagery,however,makes it necessary to develop automated techniques to geometrically rectify and mosaic the imagery such that larger areas can be monitored. In this paper,we present a technique for geometric correction and mosaicking of UAV photography using feature matching and Structure from Motion(SfM)photogrammetric techniques. Images are processed to create three dimensional point clouds,initially in an arbitrary model space. The point clouds are transformed into a real-world coordinate system using either a direct georeferencing technique that uses estimated camera positions or via a Ground Control Point(GCP)technique that uses automatically identified GCPs within the point cloud. The point cloud is then used to generate a Digital Terrain Model(DTM)required for rectification of the images. Subsequent georeferenced images are then joined together to form a mosaic of the study area. The absolute spatial accuracy of the direct technique was found to be 65-120 cm whilst the GCP technique achieves an accuracy of approximately 10-15 cm.
UAV; Structure from Motion(SfM); rectify; georeferencing; mosaicking; point cloud; Digital Terrain Model(DTM)
The use of unmanned aerial vehicles(UAVs)for natural resource applications has increased considerably in recent years due to their greater availability,the miniaturization of sensors,and the ability to deploy a UAV relatively quickly and repeatedly at low altitudes. We examine in this paper the potential of using a small UAV for rangeland inventory,assessment and monitoring. Imagery with a ground resolved distance of 8 cm was acquired over a 290 ha site in southwestern Idaho. We developed a semi-automated orthorectification procedure suitable for handling large numbers of small-footprint UAV images. The geometric accuracy of the orthorectified image mosaics ranged from 1.5 m to 2 m. We used object-based hierarchical image analysis to classify imagery of plots measured concurrently on the ground using standard rangeland monitoring procedures. Correlations between image-and ground-based estimates of percent cover resulted in r-squared values ranging from 0.86 to 0.98. Time estimates indicated a greater efficiency for the image-based method compared to ground measurements. The overall classification accuracies for the two image mosaics were 83 percent and 88 percent. Even under the current limitations of operating a UAV in the National Airspace,the results of this study show that UAVs can be used successfully to obtain imagery for rangeland monitoring,and that the remote sensing approach can either complement or replace some ground-based measurements. We discuss details of the UAV mission,image processing and analysis,and accuracy assessment.
The objective of this investigation was to develop and investigate methods for point cloud generation by image matching using aerial image data collected by quadrocopter type micro unmanned aerial vehicle(UAV)imaging systems. Automatic generation of high-quality,dense point clouds from digital images by image matching is a recent,cutting-edge step forward in digital photogrammetric technology. The major components of the system for point cloud generation are a UAV imaging system,an image data collection process using high image overlaps,and post-processing with image orientation and point cloud generation. Two post-processing approaches were developed: one of the methods is based on Bae Systems’ SOCET SET classical commercial photogrammetric software and another is built using Microsoft(R)’s Photosynth(TM)service available in the Internet. Empirical testing was carried out in two test areas. Photosynth processing showed that it is possible to orient the images and generate point clouds fully automatically without any a priori orientationinformation or interactive work. The photogrammetric processing line provided dense and accurate point clouds that followed the theoretical principles of photogrammetry,but also some artifacts were detected. The point clouds from the Photosynth processing were sparser and noisier,which is to a large extent due to the fact that the method is not optimized for dense point cloud generation. Careful photogrammetric processing with self-calibration is required to achieve the highest accuracy. Our results demonstrate the high performance potential of the approach and that with rigorous processing it is possible to reach results that are consistent with theory. We also point out several further research topics. Based on theoretical and empirical results,we give recommendations for properties of imaging sensor,data collection and processing of UAV image data to ensure accurate point cloud generation.
unmanned aerial vehicle; photogrammetry; point cloud; small sensor digital camera; calibration
Decentralized overlapping feedback laws are designed for a formation of unmanned aerial vehicles. The dynamic model of the formation with an information structure constraint in which each vehicle,except the leader,only detects the vehicle directly in front of it,is treated as an interconnected system with overlapping subsystems. Using the mathematical framework of the inclusion principle,the interconnected system is expanded into a higher dimensional space in which the subsystems appear to be disjoint. Then,at each subsystem,a static state feedback controller is designed to robustly stabilize the perturbed nominal dynamics of the subsystem. The design procedure is based on the application of convex optimization tools involving linear matrix inequalities. As a final step,the decentralized controllers are contracted back to the original interconnected system for implementation.
decentralized control; robustness; reliability; information flows; large-scale systems
We present the design and implementation of a real-time,vision-based landing algorithm for an autonomous helicopter. The landing algorithm is integrated with algorithms for visual acquisition of the target(a helipad)and navigation to the target,from an arbitrary initial position and orientation. We use vision for precise target detection and recognition,and a combination of vision and Global Positioning System for navigation. The helicopter updates its landing target parameters based on vision and uses an onboard behavior-based controller to follow a path to the landing site. We present significant results from flight trials in the field which demonstrate that our detection,recognition,and control algorithms are accurate,robust,and repeatable.
autonomous helicopter; autonomous landing; unmanned aerial vehicle; vision-based navigation
参见本期“经典文献推荐”栏目.
An evolutionary algorithm based framework,a combination of modified,breeder genetic algorithms incorporating characteristics of classic genetic algorithms,is utilized to design an offline/online path planner for unmanned aerial vehicles(UAVs)autonomous navigation. The path planner calculates a curved path line with desired characteristics in a three-dimensional(3-D)rough terrain environment,represented using B-Spline curves,with the coordinates of its control points being the evolutionary algorithm artificial chromosome genes. Given a 3-D rough environment and assuming flight envelope restrictions,two problems are solved: i)UAV navigation using an offline planner in a known environment,and,ii)UAV navigation using an online planner in a completely unknown environment. The offline planner produces a single B-Spline curve that connects the starting and target points with a predefined initial direction. The online planner,based on the offline one,is given on-board radar readings which gradually produces a smooth 3-D trajectory aiming at reaching a predetermined target in an unknown environment; the produced trajectory consists of smaller B-Spline curves smoothly connected with each other. Both planners have been tested under different scenarios,and they have been proven effective in guiding an UAV to its final destination,providing near-optimal curved paths quickly and efficiently.
3-D path planning; B-splines; evolutionary algorithms; navigation; UAV
An image-based visual servo control is presented for an unmanned aerial vehicle(UAV)capable of stationary or quasi-stationary flight with the camera mounted onboard the vehicle. The target considered consists of a finite set of stationary and disjoint points lying in a plane. Control of the position and orientation dynamics is decoupled using a visual error based on spherical centroid data,along with estimations of the linear velocity and the gravitational inertial direction extracted from image features and an embedded inertial measurement unit. The visual error used compensates for poor conditioning of the image Jacobian matrix by introducing a nonhomogeneous gain term adapted to the visual sensitivity of the error measurements. A nonlinear controller,that ensures exponential convergence of the system considered,is derived for the full dynamics of the system using control Lyapunov function design techniques. Experimental results on a quadrotor UAV,developed by the French Atomic Energy Commission,demonstrate the robustness and performance of the proposed control strategy.
aerial robotic vehicle; experiments; image-based visual servo(IBVS); underactuated systems
In September 2002,NASA’s solar-powered Pathfinder-Plus unmanned aerial vehicle(UAV)was used to conduct a proof-of-concept mission in US national airspace above the 1500 ha plantation of the Kauai Coffee Company in Hawaii. While in national airspace,the transponder-equipped UAV was supervised by regional air traffic controllers and treated like a conventionally piloted aircraft. High resolution color and multispectral imaging payloads,both drawing from the aircraft's solar power system,were housed in exterior-mounted environmental pressure pods. A local area network(LAN)using unlicensed radio frequency was used for camera control and downlink of image data at rates exceeding 5 Mbit s-1. A wide area network(WAN)allowed a project investigator stationed on the US mainland to uplink control commands during part of the mission. Images were available for enhancing,printing,and interpretation within minutes of collection. The color images were useful for mapping invasive weed outbreaks and for revealing irrigation and fertilization anomalies. Multispectral-imagery was related to mature fruit harvest from certain fields with significant fruit display on the tree canopy exterior. During 4 h “loitering” above the plantation,ground-based pilots were able to precisely navigate the UAV along pre-planned flightlines,and also perform spontaneous maneuvers under the direction of the project scientist for image collection in cloud-free zones. Despite the presence of ground-obscuring cumulus cloud cover of ca. 70% during the image collection period,the UAV's maneuvering capability ultimately enabled collection of cloud-free imagery throughout most of the plantation. The mission demonstrated the capability of a slow-flying UAV,equipped with downsized imaging systems and line-of-sight telemetry,to monitor a localized agricultural region for an extended time period. The authors suggest that evolving long-duration(weeks to months)UAVs stand to make a valuable future contribution to regional agricultural resource monitoring.
unmanned aerial vehicle; Pathfinder-Plus UAV; multispectral imaging; local area network; ripeness monitoring; weed mapping;fertigation; coffee
In this paper,a new nonlinear controller for a quadrotor unmanned aerial vehicle(UAV)is proposed using neural networks(NNs)and output feedback. The assumption on the availability of UAV dynamics is not always practical,especially in an outdoor environment. Therefore,in this work,an NN is introduced to learn the complete dynamics of the UAV online,including uncertain nonlinear terms like aerodynamic friction and blade flapping. Although a quadrotor UAV is underactuated,a novel NN virtual control input scheme is proposed which allows all six degrees of freedom(DOF)of the UAV to be controlled using only four control inputs. Furthermore,an NN observer is introduced to estimate the translational and angular velocities of the UAV,and an output feedback control law is developed in which only the position and the attitude of the UAV are considered measurable. It is shown using Lyapunov theory that the position,orientation,and velocity tracking errors,the virtual control and observer estimation errors,and the NN weight estimation errors for each NN are all semiglobally uniformly ultimately bounded(SGUUB)in the presence of bounded disturbances and NN functional reconstruction errors while simultaneously relaxing the separation principle. The effectiveness of proposed output feedback control scheme is then demonstrated in the presence of unknown nonlinear dynamics and disturbances,and simulation results are included to demonstrate the theoreticalconjecture.
Lyapunov method; neural network(NN); observer; output feedback; quadrotor unmanned aerial vehicle(UAV)
Imagery acquired with unmanned aerial vehicles(UAVs)has great potential for incorporation into natural resource monitoring protocols due to their ability to be deployed quickly and repeatedly and to fly at low altitudes. While the imagery may have high spatial resolution,the spectral resolution is low when lightweight off-the-shelf digital cameras are used,and the inclusion or texture measures can potentially increase the classification accuracy. Texture measures have been used widely in pixel-based image analysis,but their use in an object-based environment has not been well documented. Our objectives were to determine the most suitable texture measures and the optimal image analysis scale for differentiating rangeland vegetation using UAV imagery segmented at multiple scales. A decision tree was used to determine the optimal texture features for each segmentation scale. Results indicated the following: 1)The error rate of the decision tree was lower; 2)prediction success was higher; 3)class separability was greater; and 4)overall accuracy was higher(high 90% range)at coarser segmentation scales. The inclusion of texture measures increased classification accuracies at nearly all segmentation scales,and entropy was the texture measure with the highest score in most decision trees. The results demonstrate that UAVs are viable platforms for rangeland monitoring and that the drawbacks of low-cost off-the-shelf digital cameras can be overcome by including texture measures and using object-based image analysis which is highly suitable for very high resolution imagery.
Object-based classification; rangelands; scale; texture; unmanned aircraft
A fundamental aspect of autonomous vehicle guidance is planning trajectories. Historically,two fields have contributed to trajectory or motion planning methods: robotics and dynamics and control. The former typically have a stronger focus on computational issues and real-time robot control,while the latter emphasize the dynamic behavior and more specific aspects of trajectory performance. Guidance for Unmanned Aerial Vehicles(UAVs),including fixed- and rotary-wing aircraft,involves significant differences from most traditionally defined mobile and manipulator robots. Qualities characteristic to UAVs include non-trivial dynamics,three-dimensional environments,disturbed operating conditions,and high levels of uncertainty in state knowledge. Otherwise,UAV guidance shares qualities with typical robotic motion planning problems,including partial knowledge of the environment and tasks that can range from basic goal interception,which can be precisely specified,to more general tasks like surveillance and reconnaissance,which are harder to specify. These basic planning problems involve continual interaction with the environment. The purpose of this paper is to provide an overview of existing motion planning algorithms while adding perspectives and practical examples from UAV guidance approaches.
Autonomous; UAV; Guidance; Trajectory; Motion planning; Optimization; Heuristics; Complexity; Algorithm
参见本期“经典文献推荐”栏目.
Ecologists require spatially explicit data to relate structure to function. To date,heavy reliance has been placed on obtaining such data from remote-sensing instruments mounted on spacecraft or manned aircraft,although the spatial and temporal resolutions of the data are often not suited to local-scale ecological investigations. Recent technological innovations have led to an upsurge in the availability of unmanned aerial vehicles(UAVs)-aircraft remotely operated from the ground-and there are now many lightweight UAVs on offer at reasonable costs. Flying low and slow,UAVs offer ecologists new opportunities for scale-appropriate measurements of ecological phenomena. Equipped with capable sensors,UAVs can deliver fine spatial resolution data at temporal resolutions defined by the end user. Recent innovations in UAV platform design have been accompanied by improvements in navigation and the miniaturization of measurement technologies,allowing the study of individual organisms and their spatiotemporal dynamics at close range.
remotely-sensed data; aircraft systems; UAV; scale; temperature; photography; vegetation; imagery; biodiversity; camera
The development of autonomous unmanned aerial vehicles(UAVs)is of high interest to many governmental and military organizations around the world. An essential aspect of UAV autonomy is the ability for automatic path planning. In this paper,we use the genetic algorithm(GA)and the particle swarm optimization algorithm(PSO)to cope with the complexity of the problem and compute feasible and quasi-optimal trajectories for fixed wing UAVs in a complex 3D environment,while considering the dynamic properties of the vehicle. The characteristics of the optimal path are represented in the form of a multiobjective cost function that we developed. The paths produced are composed of line segments,circular arcs and vertical helices. We reduce the execution time of our solutions by using the“single-program,multiple-data” parallel programming paradigm and we achieve real-time performance on standard commercial off-the-shelf multicore CPUs. After achieving a quasi-linear speedup of 7.3 on 8 cores and an execution time of 10 s for both algorithms,we conclude that by using a parallel implementation on standard multicore CPUs,real-time path planning for UAVs is possible. Moreover,our rigorous comparison of the two algorithms shows,with statistical significance,that the GA produces superior trajectories to the PSO.
Genetic algorithm(GA); path planning; particle swarm optimization(PSO); parallel computing; unmanned aerial vehicles(UAVs)
Given the initial state of an Unmanned Aerial Vehicle(UAV)system and the relative state of the system,the continuous inputs of each flight unit are piecewise linear by a Control Parameterization and Time Discretization(CPTD)method. The approximation piecewise linearization control inputs are used to substitute for the continuous inputs. In this way,the multi-UAV formation reconfiguration problem can be formulated as an optimal control problem with dynamical and algebraic constraints. With strict constraints and mutual interference,the multi-UAV formation reconfiguration in 3-D space is a complicated problem. The recent boom of bio-inspired algorithms has attractedmany researchers to the field of applying such intelligent approaches to complicated optimization problems in multi-UAVs. In this paper,a Hybrid Particle Swarm Optimization and Genetic Algorithm(HPSOGA)is proposed to solve the multi-UAV formation reconfiguration problem,which is modeled as a parameter optimization problem. This new approach combines the advantages of Particle Swarm Optimization(PSO)and Genetic Algorithm(GA),which can find the time-optimal solutions simultaneously. The proposed HPSOGA will also be compared with basic PSO algorithm and the series of experimental results will show that our HPSOGA outperforms PSO in solving multi-UAV formation reconfiguration problem under complicated environments.
formation flight control; evolutionary; model; spacecraft; vehicles; robots; teams
Can UAV-based NIR remote sensing support restoration monitoring of cut-over bogs by providing valid information on species distribution and surface structure? Location Restored polders of the Uchter Moor,a bog complex in NW Germany. Methods We used autonomously flying quadrocopters,supplied with either a panchromatic or colour infrared calibrated small frame digital camera to generate high resolution images of the restored bog surface. We performed a two-step classification process of automatic image segmentation and object-based classification to distinguish between four pre-defined classes(waterlogged bare peat,Sphagnum spp.,Eriophorum vaginatum and Betula pubescens. An independent validation procedure was performed to evaluate the accuracy of the classification. Results A set-up composed of decision rules for reflectance,geometry and textural features was applied for identification of the four classes. The presented classification revealed an overall accuracy level of 91%. Most reliable attribution was obtained for waterlogged bare peat and Sphagnum-covered surfaces,revealing producer accuracies of 95% and 91%,respectively. Lower but still feasible accuracy levels were obtained for Eriophorum vaginatum and Betula pubescens individuals(89% and 84%,respectively). Conclusions UAV-based NIR remote sensing is a promising tool for monitoring the restoration of cut-over bogs and has the potential to significantly reduce laborious field surveys. UAVs may increasingly play a significant role in future ecological monitoring studies,since they are small in size,highly flexible,easy to handle,non-emissive and available at a comparatively low cost.
Bog vegetation; Colour infrared; Eriophorum; Near-infrared; Object-based image classification; Sphagnum; UAV
The availability of high-resolution Digital Surface Models of coastal environments is of increasing interest for scientists involved in the study of the coastal system processes. Among the range of terrestrial and aerial methods available to produce such a dataset,this study tests the utility of the Structure from Motion(SfM)approach to low-altitude aerial imageries collected by Unmanned Aerial Vehicle(UAV). The SfM image-based approach was selected whilst searching for a rapid,inexpensive,and highly automated method,able to produce 3D information from unstructured aerial images. In particular,it was used to generate a dense point cloud and successively a high-resolution Digital Surface Models(DSM)of a beach dune system in Marina di Ravenna(Italy). The quality of the elevation dataset produced by the UAV-SfM was initially evaluated by comparison with point cloud generated by a Terrestrial Laser Scanning(TLS)surveys. Such a comparison served to highlight an average difference in the vertical values of 0.05 m(RMS=0.19 m). However,although the points cloud comparison is the best approach to investigate the absolute or relative correspondence between UAV and TLS methods,the assessment of geomorphic features is usually based on multi-temporal surfaces analysis,where an interpolation process is required. DSMs were therefore generated from UAV and TLS points clouds and vertical absolute accuracies assessed by comparison with a Global Navigation Satellite System(GNSS)survey. The vertical comparison of UAV and TLS DSMs with respect to GNSS measurements pointed out an average distance at cm-level(RMS=0.011 m). The successive point by point direct comparison between UAV and TLS elevations show a very small average distance,0.015 m,with RMS=0.220 m. Larger values are encountered in areas where sudden changes in topography are present. The UAV-based approach was demonstrated to be a straightforward one and accuracy of the vertical dataset was comparable with results obtained by TLS technology.
UAV; structure from motion; terrestrial laser scanning; digital surface model; beach dunes system
Micro-unmanned aerial vehicles often collect a large amount of images when mapping an area at an ultrahigh resolution. A direct georeferencing technique potentially eliminates the need for ground control points. In this paper,we developed a camera-global positioningsystem(GPS)module to allow the synchronization of camera exposure with the airframe's position as recorded by a GPS with 10-20 cm accuracy. Lever arm corrections were applied to the camera positions to account for the positional difference between the GPS antenna and the camera center. Image selection algorithms were implemented to eliminate blurry images and images with excessive overlap. This study compared three different software methods(Photoscan,Pix4D web service,and an in-house Bundler method). We evaluated each based on processing time,ease of use,and the spatial accuracy of the final mosaic produced. Photoscan showed the best performance as it was the fastest and the easiest to use and had the best spatial accuracy(average error of 0.11 m with a standard deviation of 0.02 m). This accuracy is limited by the accuracy of the differential GPS unit(10-20 cm)used to record camera position. Pix4D achieved a mean spatial error of 0.24 m with a standard deviation of 0.03 m,while the Bundler method had the worst mean spatial accuracy of 0.76 m with a standard deviation of 0.15 m. The lower performance of the Bundler method was due to its poor performance in estimating camera focal length,which,in turn,introduced large errors in the Z-axis for the translation equations.
Remote sensing; unmanned aerial vehicles(UAVs)
This paper presents a solution to solve the car detection and counting problem in images acquired by means of unmanned aerial vehicles(UAVs). UAV images are characterized by a very high spatial resolution(order of few centimeters),and consequently by an extremely high level of details which calls for appropriate automatic analysis methods. The proposed method starts with a screening step of asphalted zones in order to restrict the areas where to detect cars and thus to reduce false alarms. Then,it performs a feature extraction process based on scalar invariant feature transform thanks to which a set of keypoints is identified in the considered image and opportunely described. Successively,it discriminates between keypoints assigned to cars and all the others,by means of a support vector machine classifier. The last step of our method is focused on the grouping of the keypoints belonging to the same car in order to get a “one keypoint-one car”relationship. Finally,the number of cars present in the scene is given by the number of final keypoints identified. The experimental results obtained on a real UAV scene characterized by a spatial resolution of 2 cm show that the proposed method exhibits a promising car counting accuracy.
Car detection; feature extraction; scale invariant feature transform(SIFT); support vector machine(SVM); unmanned aerial vehicle(UAV)
A novel hyperspectral measurement system for unmanned aerial vehicles(UAVs)in the visible to near infrared(VIS/NIR)range(350-800 nm)was developed based on the Ocean Optics STS microspectrometer. The ultralight device relies on small open source electronics and weighs a ready-to-fly 216 g. The airborne spectrometer is wirelessly synchronized to a second spectrometer on the ground for simultaneous white reference collection. In this paper,the performance of the system is investigated and specific issues such as dark current correction or second order effects are addressed. Full width at half maximum was between 2.4 and 3.0 nm depending on the spectral band. The functional system was tested in flight at a 10-m altitude against a current field spectroscopy gold standard device Analytical Spectral Devices Field Spec 4 over an agricultural site. A highly significant correlation(r(2)>0.99)was found in reflection comparing both measurement approaches. Furthermore,the aerial measurements have a six times smaller standard deviation than the hand held measurements. Thus,the present spectrometer opens a possibility for low-cost but high-precision field spectroscopy from UAVs.
Hyperspectral sensors; remote sensing; unmanned aerial vehicles; vegetation; calibration
Himalayan glacier tongues are commonly debris covered and they are an important source of melt water. However,they remain relatively unstudied because of the inaccessibility of the terrain and the difficulties in field work caused by the thick debris mantles. Observations of debris-covered glaciers are therefore scarce and airborne remote sensing may bridge the gap between scarce field observations and coarse resolution space-borne remote sensing. In this study we deploy an Unmanned Aerial Vehicle(UAV)before and after the melt and monsoon season(May and October 2013)over the debris-covered tongue of the Lirung Glacier in Nepal. Based on stereo-imaging and the structure for motion algorithm we derive highly detailed ortho-mosaics and digital elevation models(DEMs),which we geometrically correct using differential GPS observations collected in the field. Based on DEM differencing and manual featuretracking we derive the mass loss and the surface velocity of the glacier at a high spatial accuracy. On average,mass loss is limited and the surface velocity is very small. However,the spatial variability of melt rates is very high,and ice cliffs and supra-glacial ponds show mass losses that can be an order of magnitude higher than the average. We suggest that future research should focus on the interaction between supraglacial ponds,ice cliffs and englacial hydrology to further understand the dynamics of debris-covered glaciers. Finally,we conclude that UAV deployment has large potential in glaciology and it may revolutionize methods currently applied in studying glacier surface features.
UAV; Photogrammetry; DEM differencing; Himalaya; Glacier dynamics; Climate change; Ice cliffs; Supra-glacial ponds
During the last years commercial hyperspectral imaging sensors have been miniaturized and their performance has been demonstrated on Unmanned Aerial Vehicles(UAV). However currently the commercial hyperspectral systems still require minimum payload capacity of approximately 3 kg,forcing usage of rather large UAVs. In this article we present a lightweight hyperspectral mapping system(HYMSY)for rotor-based UAVs,the novel processing chain for the system,and its potential for agricultural mapping and monitoring applications. The HYMSY consists of a custom-made pushbroom spectrometer(400-950 nm,9 nm FWHM,25 lines/s,328 px/line),a photogrammetric camera,and a miniature GPS-Inertial Navigation System. The weight of HYMSY in ready-to-fly configuration is only 2.0 kg and it has been constructed mostly from off-the-shelf components. The processing chain uses a photogrammetric algorithm to produce a Digital Surface Model(DSM)and provides high accuracy orientation of the system over the DSM. The pushbroom data is georectified by projecting it onto the DSM with the support of photogrammetric orientations and the GPS-INS data. Since an up-to-date DSM is produced internally,no external data are required and the processing chain is capable to georectify pushbroom data fully automatically. The system has been adopted for several experimental flights related to agricultural and habitat monitoring applications. For a typical flight,an area of 2-10 ha was mapped,producing a RGB orthomosaic at 1-5 cm resolution,a DSM at 5-10 cm resolution,and a hyperspectral datacube at 10-50 cm resolution.
Unmanned Aerial Vehicle(UAV); hyperspectral mapping system; agriculture; remote sensing; photogrammetry
Unmanned aerial vehicle(UAV)remote sensing has great potential for vegetation mapping in complex urban landscapes due to the ultra-high resolution imagery acquired at low altitudes. Because of payload capacity restrictions,off-the-shelf digital cameras are widely used on medium and small sized UAVs. The limitation of low spectral resolution in digital cameras for vegetation mapping can be reduced by incorporating texture features and robust classifiers. Random Forest has been widely used in satellite remote sensing applications,but its usage in UAV image classification has not been well documented. The objectives of this paper were to propose a hybrid method using Random Forest and texture analysis to accurately differentiate land covers of urban vegetated areas,and analyze how classification accuracy changes with texture window size. Six least correlated second-order texture measures were calculated at nine different window sizes and added to original Red-Green-Blue(RGB)images as ancillary data. A Random Forest classifier consisting of 200 decision trees was used for classification in the spectral-textural feature space. Results indicated the following:(1)Random Forest outperformed traditional Maximum Likelihood classifier and showed similar performance to object-based image analysis in urban vegetation classification;(2)The inclusion of texture features improved classification accuracy significantly;(3)classification accuracy followed an inverted U relationship with texture window size. The results demonstrate that UAV provides an efficient and ideal platform for urban vegetation mapping. The hybrid method proposed in this paper shows good performance in differentiating urban vegetation mapping. The drawbacks of off-the-shelf digital cameras can be reduced by adopting Random Forest and texture analysis at the same time.
UAV; vegetation mapping; urban landscape; random forest; texture analysis
One typical application of unmanned aerial vehicles(UAVs)is the intelligence,surveillance,and reconnaissance mission,where the objective is to improve situation awareness through information acquisition. For example,an efficient way to gather information regarding a target is to deploy UAV in such a way that it orbits around this target at a desired distance. Such a UAV motion is called circumnavigation. The objective of this paper is to design a control algorithm such that this circumnavigation mission is achieved under a GPS-denied environment when only range measurement is used. The control algorithm is constructed in two steps. The first step is to design a control algorithm by assuming the availability of both range and range rate measurements,where the associated control input isalways bounded. The second stevis to further eliminate the use of range rate measurement by using an estimated range rate,obtained via a sliding-mode estimator based on range measurement,to replace actual range rate measurement. Such a controller design technique is applicable in other UAV navigation and control missions when a GPS-denied environment is considered.
UAV; Autonomy; Joint estimation and control; Sliding-mode estimator; GPS-denied environment
The aquatic unmanned aerial vehicle(AquaUAV),a kind of vehicle that can operate both in the air and the water,has been regarded as a new breakthrough to broaden the application scenario of UAV. Wide application prospects in military and civil field are more than bright,therefore many institutions have focused on the development of such a vehicle. However,due to the significant difference of the physical properties between the air and the water,it is rather difficult to design a fully-featured AquaUAV. Until now,majority of partially-featured AquaUAVs have been developed and used to verify the feasibility of an aquatic-aerial vehicle. In the present work,we classify the current partially-featured AquaUAV into three categories from the scope of the whole UAV field,i.e.,the seaplane UAV,the submarine-launched UAV,and the submersible UAV. Then the recent advancements and common characteristics of the three kinds of AquaUAVs are reviewed in detail respectively. Then the applications of bionics in the design of AquaUAV,the transition mode between the air and the water,the morphing wing structure for air-water adaptation,and the power source and the propulsion type are summarized and discussed. The tradeoff analyses for different transition methods between the air and the water are presented. Furthermore,it indicates that applying the bionics into the design and development of the AquaUAV will be essential and significant. Finally,the significant technical challenges for the AquaUAV to change from a conception to a practical prototype are indicated.
Bionics; Aquatic-aerial operation; Aquatic unmanned aerial vehicle(AquaUAV); Air-water transition; Water-air transition;Morphing structure
Remotely Piloted Aircraft(RPA)is presently in continuous development at a rapid pace. Unmanned Aerial Vehicles(UAVs)or more extensively Unmanned Aerial Systems(UAS)are platforms considered under the RPAs paradigm. Simultaneously,the development of sensors and instruments to be installed onboard such platforms is growing exponentially. These two factors together have led to the increasing use of these platforms and sensors for remote sensing applications with new potential. Thus,the overall goal of this paper is to provide a panoramic overview about the current status of remote sensing applications based on unmanned aerial platforms equipped with a set of specific sensors and instruments. First,some examples of typical platforms used in remote sensing are provided. Second,a description of sensors and technologies is explored which are onboard instruments specifically intended to capture data for remote sensing applications. Third,multi-UAVs in collaboration,coordination,and cooperation in remote sensing are considered. Finally,a collection of applications in several areas are proposed,where the combination of unmanned platforms and sensors,together with methods,algorithms,and procedures provide the overview in very different remote sensing applications. This paper presents an overview of different areas,each independent from the others,so that the reader does not need to read the full paper when a specific application is of interest.
structure-from-motion; sagebrush steppe ecosystems; synthetic-aperture radar; wireless sensor network; narrow-band indexes;antarctic moss beds; laser-scanning data; water-stress index; leaf-area index; high-resolution
Image-based tracking control of VTOL unmanned aerial vehicles
Abdessameud,Abdelkader; Janabi-Sharifi,Farrokh
This paper addresses the image-based control problem of vertical take-off and landing(VTOL)unmanned aerial vehicles(UAVs). Specifically,we propose a control scheme allowing the aircraft to track a moving target captured by an onboard camera where the orientation and angular velocity of the vehicle are assumed available for feedback. The proposed approach relies on appropriate image features,defined based on perspective image moments along with a useful projection,and the design of a bounded adaptive translational controller without linear velocity measurements in the presence of external disturbances. Estimates of the target’s acceleration and the disturbances as well as some auxiliary variables are used to simplify the control design and guarantee the stability of the overall closed loop system. Simulation examples are provided to show the effectiveness of the proposed theoretical results.
Image-based control; Unmanned aerial vehicles; VTOL; Target tracking
本领域经典文章题目第一作者来源出版物1Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring From an Unmanned Aerial VehicleBerni,Jose A. JIEEE Transactions on Geoscience and Remote Sensing,2009,47(3): 722-738 2 Assessment of unmanned aerial vehicles imagery for Lelong,Camille quantitative monitoring of wheat crop in small plots C. D SENSORS,2008,8(5): 3557-3585 3 An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle(UAV)Imagery,Based on Structure from Motion(SfM)Point Clouds Turner,DarrenRemote Sensing,2012,4(5): 1392-1410 Acquisition,Orthorectification,and Object-based 4 Classification of Unmanned Aerial Vehicle(UAV)Laliberte,Photogrammetric Engineering and Remote Imagery for Rangeland Monitoring Andrea S Sensing,2010,76(6): 661-672 5 Point Cloud Generation from Aerial Image Data Acquired by a Quadrocopter Type Micro Unmanned Aerial Vehicle and a Digital Still Camera Rosnell,TomiSENSORS,2012,12(1): 453-480
*摘编自《中国科学:技术科学》2010年40卷8期:853~860页,图、表及参考文献已省略。
猜你喜欢
山东冶金(2022年2期)2022-08-08
山东冶金(2022年3期)2022-07-19
环球时报(2022-05-30)2022-05-30
当代陕西(2019年11期)2019-06-24
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
中国气象科学研究院年报(2017年0期)2017-07-19
作文周刊·小学一年级版(2017年9期)2017-06-20
岷峨诗稿(2017年4期)2017-04-20
小学生导刊(低年级)(2016年8期)2016-09-24