
一种航天器单脉冲差模角跟踪系统的标定及测试方法
2015-10-28 03:36:09杨显强侯芬陈小群苗常青
航天器工程 2015年3期
杨显强 侯芬 陈小群 苗常青
(中国空间技术研究院通信卫星事业部,北京 100094)
一种航天器单脉冲差模角跟踪系统的标定及测试方法
杨显强 侯芬 陈小群 苗常青
(中国空间技术研究院通信卫星事业部,北京 100094)
介绍了航天器单脉冲差模角跟踪系统的组成和基本原理;针对捕获跟踪系统性能与射频通道相位特性的相关性,提出了在无线状态下通过用户目标在一定范围内按一定轨迹运动进行射频通道相位标定及跟踪性能测试的方法;在此基础上进一步提出了利用信号源模拟用户目标在角跟踪系统天线坐标系下不同位置时天线输出的射频信号,进行有线状态下射频通道性能的测试方法。标定及测试方法通过地面试验验证了可行性和有效性,可用于航天器单脉冲差模角跟踪系统在地面的通道相位标定、跟踪性能测试和射频通道性能测试,以实现角跟踪系统对用户目标高精度、稳定的跟踪。
航天器;单脉冲差模角跟踪系统测试;相位标定;射频通道
1 引言
捕获跟踪系统是具有星间高速数据传输能力的航天器重要组成部分,其主要功能是控制星间链路天线指向并跟踪用户目标,其性能直接影响星间链路的数据传输能力。受平台能力限制,国际上大部分具有自跟踪功能的航天器的捕获跟踪系统均采用单脉冲、单通道差模角跟踪技术体制[1-2](即单脉冲差模角跟踪系统,以下简称角跟踪系统)。角跟踪系统工作时,星间链路天线接收用户目标发来的射频信号,在馈源内激励起和信号的同时,还激励起与用户目标位置相关的星间天线指向误差信号。角跟踪系统实现误差信号的获取与分离,驱动执行机构按照角跟踪系统输出的误差信号完成天线指向控制,实现用户目标捕获及持续自跟踪。
由于航天器自身结构设计及系统布局的原因,天线及射频通道设备连接组成角跟踪系统后,和、差通道路径电长度不一致,从而导致和、差通道间设备存在相位不一致性,此时和、差通道的相位相对关系是未知的。为此,要采用无线状态进行相位标定,调整角跟踪系统设备的设计参数,使误差特性的斜率、极性、交叉耦合等指标达到预期的要求,并能在有线状态下测量和、差通道的指标和性能稳定性,以保证对用户目标的捕获跟踪[3-4]。
地面应用的角跟踪系统进行相位标定和跟踪性能测试时,一般是建设专用的标校塔,在塔上安装标校信号发射装置,使跟踪天线的指向偏离标校塔一定角度来接收标校信号,以标定角跟踪系统的相位[3];通过角跟踪系统在运动状态下对标校信号的跟踪,实现对用户目标跟踪性能的测试。航天器在轨工作时处于零重力环境,因此在地面试验时需要复杂的二维卸载装置克服重力对角跟踪系统运动特性的影响,同时,航天器对试验环境条件有严格的要求。因此,在地面标定航天器角跟踪系统对用户目标的跟踪性能时,要求模拟用户目标(以下简称为用户目标)具有按一定轨道运动的能力,以仿真角跟踪系统与用户目标间的相对运动。
目前,国内外针对航天器角跟踪系统地面无线相位标定和有线通道测试方法的文献还比较少。本文在分析航天器角跟踪系统基本工作原理的基础上,提出了地面无线相位标定和有线通道性能测试的方法,可实现无线状态下和、差通道相位标定和系统自跟踪性能测试,以及有线状态下射频通道的输入输出特性及角误差信号特性的测试,检验角跟踪系统设计,实现对用户目标的高精度、稳定跟踪。
2 角跟踪系统的组成及原理
传统的角跟踪系统包括射频敏感器和驱动执行机构两部分,见图1[5-6]。典型的射频敏感器包括天线,和、差通道低噪声放大器(LNA),单通道调制器,下变频器和跟踪接收机;驱动执行机构包括天线指向控制器和驱动机构。

图1 典型角跟踪系统组成Eig.1 Composition of a typical angular tracking system
角跟踪系统是利用差模电场方向图在天线轴向为零值、在偏轴角度上有极性的特点实现自跟踪[7-8]。当天线指向正对用户目标时,天线输出的和信号最大,误差信号为零;当天线指向偏离用户目标时,天线输出的和信号下降,误差信号不再为零,误差信号的幅度和相位与在天线坐标系下用户目标的位置相关。天线输出的和、差信号经低噪声放大后,在单通道调制器内按接收机指定时序合成为一路信号,变频后送入跟踪接收机检波得到方位误差、俯仰误差与和信号;天线指向控制器根据收到的误差信号控制驱动机构调整天线指向,使天线对准用户目标,实现自跟踪。在一定的天线指向偏差角范围内,跟踪接收机输出的方位误差电压ΔAz和俯仰误差电压ΔEl分别为[8-9]

式中:μ为自跟踪天线的近轴差斜率,为常数;θ为天线指向用户目标的偏离角;μθ为差通道信号与和通道信号的幅度差,其值代表天线波束的指向误差角的大小;Φ为和通道信号与差通道信号的相位差,其值代表波束指向的方位角;β为和、差通道不一致性引入的相位差。
3 无线状态系统相位标定及测试方法
建立用户目标到角跟踪系统间的无线链路,通过调整用户目标在角跟踪系统天线坐标系下的位置获得误差电压;调整角跟踪系统的相位补偿值,使误差电压的极性、幅值与用户目标位置关系按预期对应起来;角跟踪系统跟踪按一定轨迹运动的用户目标,测试角跟踪系统的自跟踪性能。
3.1 标定试验场地及工作原理
由于航天器实际在轨工作时处于零重力环境,因此地面试验时,天线及驱动机构要采用特定的卸载装置进行重力卸载,以抵消重力的影响,模拟在轨工作时天线的运动状态。同时,用户目标要具有按一定轨道运动的能力,以实现角跟踪系统与用户目标间的相对运动。因此,试验系统设计主要考虑角跟踪系统与用户目标间的距离、扫描塔架尺寸、角跟踪系统电磁环境等因素。
3.1.1 角跟踪系统与用户目标间的距离要求
在进行相位标定及跟踪性能测试时,理论上要求用户目标位于角跟踪天线辐射远场区,对于电大口径的星间链路天线,满足远场条件的最小距离为

式中:D为角跟踪天线直径;λ为工作波长。
研究表明,与角跟踪天线的距离从R0减小到R0/4的过程中,天线主瓣3 dB波束宽度、10 dB波束宽度以及方向性均与远场接近,且随距离的变化不明显[10]。在距离R0/4处,增益比远场区下降约0.8 d B,自跟踪性能测试时,可通过加大用户目标发射功率的方法,补偿天线增益降低对捕获灵敏度及动态范围测试的影响;差信号的相位较和信号相位滞后21°~22°,该相位可由角跟踪系统进行补偿,不会对跟踪性能产生影响。在3 d B波束宽度范围内,天线指向偏离不同角度时,和、差信号相位差变化约为1°,该相位差导致的交叉耦合测试误差小于1%。由此可见,通过采用加大用户目标发射功率及角跟踪系统进行相位补偿的方法,可以采用在距离天线R0/4~R0间放置用户目标的近距离标校方案,标定角跟踪系统的相位及跟踪性能。
3.1.2 扫描塔架尺寸设计
扫描塔架的尺寸取决于用户目标的运动速度、运行时间,以及角跟踪系统与用户目标间的距离。用户目标的二维运动是通过立柱沿扫描塔架水平运动,同时吊舱沿着立柱上下运动实现。考虑到两维运动速度控制精度高,系统设计时,预留一定的匀加速和匀减速距离,保证立柱运行的平稳;同时,为保证安全,扫描塔架两端设计有限位机构,以避免立柱撞击到扫描塔架。
3.1.3 角跟踪系统电磁环境
为消除地面反射及空间电磁环境影响,角跟踪系统放置于半开口吸波室内,角跟踪系统天线的架设高度h应满足式(3),以减少多径效应对试验的影响。

式中:R为角跟踪系统天线到用户目标的距离;d为用户目标的天线在竖直方向的直径。
3.2 标定项目及试验方法
角跟踪系统的主要标定项目包括和、差通道相位的一致性标定和自跟踪性能测试。图2给出了和、差通道相位一致性标定的典型流程。
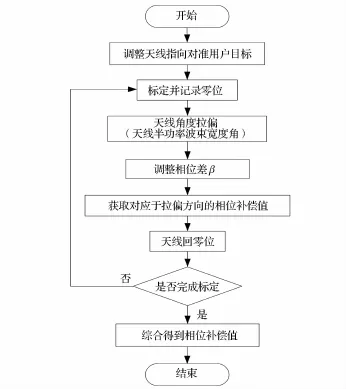
图2 和、差通道相位一致性标定流程Eig.2 Calibration flow of sum and difference channel phase coherence
具体试验过程如下:
(1)进行模式设置,设置系统禁止转入自跟踪模式,避免天线误动作造成损伤;调整天线指向,使其对准用户目标,并将该指向定义为零位,再进行天线指向的方位正向拉偏,拉偏角度为天线的半功率波束宽度;通过角跟踪系统的相位补偿功能,补偿和、差通道相位差β,使其方位误差电压为负最小值,俯仰误差电压为零,得到方位正向相位补偿值β1。
(2)天线回到零位,与上述标定步骤类似,完成方位负向的拉偏,通过角跟踪系统的相位补偿功能,补偿和、差通道相位差β,使方位误差电压为正最大值,俯仰误差电压为零,得到方位负向相位补偿值β2。
(3)同样,按照上述(1)、(2)完成俯仰正、负方向的拉偏,并获得相位补偿值β3和β4。
(4)根据方位与俯仰标定的相位补偿结果进行综合,常用的综合方法是将方位与俯仰相位补偿因子求算术平均值,得到系统的相位补偿因子。
将系统相位补偿因子注入角跟踪系统,设置系统允许转入自跟踪模式,并跟踪按一定轨迹运动的用户目标,记录捕获时间、自跟踪精度。
4 有线状态射频通道性能测试方法
有线状态通道性能测试是利用信号源模拟用户目标在角跟踪系统天线坐标系下不同位置时天线输出的射频和、差信号,通过有线方式输出到被测通道,两路信号的幅度、相位状态可以根据实验需要进行设置,实现角跟踪系统通道性能的有线测试。
4.1 测试系统组成及工作原理
图3给出了测试系统组成和连接关系框图,测试系统包括信号产生模块、模拟误差信号生成模块和控制与数据读取模块。信号产生模块用于产生模拟用户目标的返向数传信号,信号的码速率、调制方式由控制与数据读取模块设定;模拟误差信号生成模块接收信号产生模块传来的数传信号,并将信号分为两路,在控制与数据读取模块的控制下模拟用户目标在星间链路天线坐标系下不同位置时天线输出的射频和、差信号,并将其输送给角跟踪系统;控制与数据读取模块将角跟踪系统的输出与模拟误差信号生成模块的输出进行比较,判定角跟踪系统的通道传输性能。
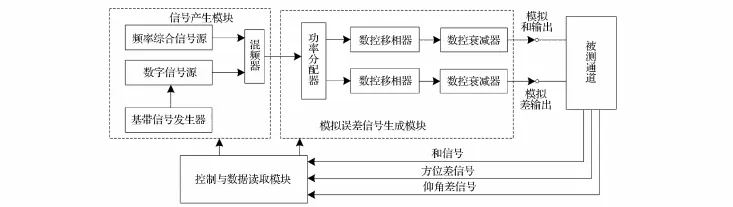
图3 有线测试系统与待测通道Eig.3 Diagram of wireless system with channel under test
4.2 主要测试项目及方法
有线状态下射频通道性能测试主要包括和通道输入输出特性测试和角误差特性测试。
4.2.1 和通道输入输出特性测试
在测试和通道输入输出特性时,设置模拟和、差通道数控衰减器为固定衰减值,调节信号源输出,使被测通道输出的和电压为捕获灵敏度对应的电压值;设置信号源,使模拟和输出电平在规定的动态范围内按规定步长增大;根据模拟和输出电平与被测通道输出的和电压,即可获得被测和通道的输入输出特性曲线。
4.2.2 角误差特性测试
在测试角误差特性时,调节信号源输出及模拟和通道数控衰减器,使被测通道输出的和电压为要求值;按给定的角度-增益数据,设置模拟和通道数控衰减器为某一角度对应的归一化和方向图增益值,差通道数控衰减器为相同角度对应的以和方向图为基准的归一化差方向图增益值;设置数控移相器补偿衰减器引入的附加相移;根据和信号、方位差信号、俯仰差信号,得到某一角度的误差特性。在规定的角度范围内,按规定步长测试各角度的误差特性,即可获得被测通道在规定角度范围内的角误差特性曲线。
5 地面试验验证
地面试验验证包括无线状态相位标定和自跟踪性能测试验证,以及有线状态通道性能测试验证。
5.1 无线状态试验
根据上文提出的无线状态相位标定,设计了一个工作于26 GHz、天线口径为4 m的角跟踪系统进行无线状态相位标定及跟踪性能测试试验。如图4所示,角跟踪系统天线与用户目标距离为1000 m(约为R0/3);半开口吸波室距离地面高度为15 m;被跟踪的用户目标安装在吊舱上,吊舱可以沿着立柱上下运动,运动距离45 m,立柱可以在扫描塔架内水平运动,运动距离56 m,对应角跟踪系统天线的转角分别为方位方向2.5°,俯仰方向3.2°。
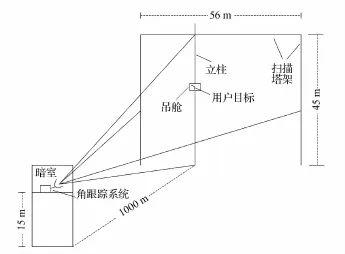
图4 相位标定及跟踪性能试验系统Eig.4 Phase calibration and tracking performance test system
5.1.1 相位标定
根据上述试验状态设置,进行无线状态下的系统相位标定,标定结果如表1所示。下面给出的角跟踪性能测试和角误差特性测试,均在这一标定结果的基础上进行。
按照方位、俯仰的正、反向顺序进行标定,根据天线设计的半功率波束宽度,拉偏角度设置为0.1°,得到4组相位补偿值,并记录下方位差信号与俯仰差信号的电压值,然后进行相位综合,取算术平均值,得到相位补偿因子。将相位补偿因子注入角跟踪系统,进行角度拉偏验证,测试相位补偿后的方位差信号、俯仰差信号,得到的交叉耦合值最大为4.2%,测试结果与角跟踪系统小于5%的交叉耦合仿真设计结果一致。航天器发射入轨后,测试的角跟踪系统交叉耦合为4%,证明了上述方法的有效性和可行性。

表1 无线状态系统相位标定结果Table 1 System phase calibration results in wireless situation
5.1.2 自跟踪性能测试
通过对用户目标的搜索、自跟踪,测试自跟踪精度。测试过程如下:设置用户目标和角跟踪系统天线相同的运动轨迹;用户目标置于轨迹起点,将角跟踪系统天线指向拉偏到一定角度,设置角跟踪系统工作于搜索状态并允许转到自跟踪模式;同时启动用户目标和角跟踪系统天线,记录跟踪精度。进行自跟踪精度测试时,先通过链路预算计算和信号的大小,再根据计算结果设置合适的捕获阈值,以避免阈值过高不能捕获目标,也要避免阈值过低而锁定在用户目标的副瓣上。
如图5所示,测试过程中用户目标按照测试系统预定的轨迹运动,天线从预设0.35°的拉偏角度开始进行螺旋扫描,根据设定的扫描螺距和速度,系统在30 s内完成对用户目标的捕获并成功转入自跟踪模式,直至用户目标设定运动轨迹结束。在跟踪弧度内,天线扫描轨迹与用户目标运动轨迹重合,自跟踪误差优于0.02°,跟踪性能良好。
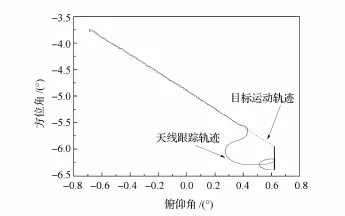
图5 自跟踪测试结果Eig.5 Auto-tracking test results
5.2 有线状态通道测试
在射频通道有线测试试验中,角跟踪系统工作于25.8~26.2 GHz,输入信号动态范围为-90~-50 dBm;测试系统输出信号的频率为25~27.5 GHz,功率动态范围大于50 d B,模拟和、差通道相位差为0~360°且可调(步进2°),测试结果可以自动处理。
5.2.1 输入输出特性测试
和通道输入输出特性测试是测量射频敏感器和通道的射频输入与直流电压输出间的对应关系。有线测试时,要在和通道的低噪放入口加入与通道工作频率对应的一定码速率和调制方式的射频信号,测量通道动态范围内接收机输出电压与所加功率的对应关系。设置信号源产生模块输出的频率为被测试和通道的中心频率26 GHz,信号源码速率为2 Mbit/s,调制方式为QPSK;设置信号源模块的输出功率,使其到达待测通道输入口处的电平-70 dBm,作为输入电平的起点,按照1 dB步长进行输出功率的调整,直到被测通道输入口处电平为—20 dBm,信号源的功率输出精度优于0.1 dB,得到50 dB电平范围内的输出电压特性;依次记录不同输入功率对应的接收机输出和电压,即可获得被测和通道的输入输出特性曲线(如图6所示)。可见,在—60~—20 dBm约40 dB的动态范围内,输入输出特性的实测结果与设计结果吻合。
5.2.2 角误差特性测试
根据上文提出的有线状态射频通道性能测试方法,按照图3的系统连接形式对待测通道进行角误差特性测试,根据系统设计的工作频率及带宽,设置信号源模块输出的频率为被测试和通道的中心频率26 GHz,设置信号源码速率为300 Mbit/s,调制方式为8PSK;调节信号源模块的输出功率,使其到达待测通道输入口处的电平—50 dBm,然后设置方位轴从—0.5°~+0.5°进行拉偏扫描,扫描速度为0.005(°)/s,可以得到方位轴—0.5°~+0.5°不同角度的俯仰和方位误差电压,如图7所示,即为待测通道的角误差特性曲线。
表2为角误差特性测试结果。通过通道角误差特性测试,可以获得±0.1°线性范围内方位轴跟踪斜率为-49.8;零点漂移电压为0.012 V,交叉耦合为4.4%,测试结果与角跟踪系统的设计仿真结果一致,交叉耦合测试结果与无线状态标定结果一致,验证了测试系统的有效性。
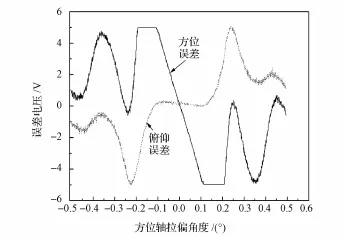
图7 实测角误差特性曲线Eig.7 Curve of angular error characteristics

表2 角误差特性测试结果Table 2 Test results of angular error characteristics
6 结束语
本文介绍了航天器角跟踪系统地面无线标定和有线状态射频通道性能测试方法,该方法已成功应用于航天器的研制。角跟踪系统的地面无线标定为航天器地面试验、测试提供了相位基准,同时为在轨相位标定提供了参考;射频通道有线性能测试获得的基础数据为角跟踪系统在轨测试提供了基础,对于采用单脉冲差模角跟踪技术的航天器,均可采用本文提出的无线状态的相位标定方法和有线状态的射频通道测试方法,通过在地面进行标定和测试,使角跟踪系统具备高精度跟踪用户目标的能力。
(
)
[1]黎孝纯,邱乐德,陈明章,等.星间链路天线跟踪指向系统[M].上海:上海交通大学出版社,2013 Li Xiaochun,Qiu Lede,Chen Mingzhang,et al.Intersatellite antenna tracking and pointing system[M].Shanghai:Shanghai Jiaotong University Press,2013(in Chinese)
[2]黎孝纯,于瑞霞,闫剑虹.星间链路天线扫描捕获方法[J].空间电子技术,2008,5(4):5-10 Li Xiaochun,Yu Ruixia,Yan Jianhong,A method for scan acquisition of the inter satellite links antenna[J].Chinese Space Science and Technology,2008,5(4):5-10(in Chinese)
[3]黎孝纯.星间链路角跟踪系统校相分析[J].空间电子技术,2009,6(2):109-114 Li Xiaochun.The analysis for phase calibration of angle tracking system in inter-satellite links[J].Chinese Space Science and Technology,2009,6(2):109-114(in Chinese)
[4]翟坤,李顺利,杨涤.用户星天线空间扫描策略[J].航空学报,2008,29(5):1308-1313 Zhai Kun,Li Shunli,Yang Di.Space scanning strategies for user satellite's antenna[J].Acta Aeronautica et Astronautica Sinica,2008,29(5):1308-1313(in Chinese)
[5]汪晓燕.单通道单脉冲角跟踪系统的研究[J]电讯技术,2005,45(3):117-120 Wang Xiaoyan.Study on single channel monopulse angular tracking systems[J].Telecommunication Engineering,2005,45(3):117-120(in Chinese)
[6]杰里L·伊伏斯.现代雷达原理[M].卓荣邦,杨士毅,张金泉,译.北京:电子工业出版社,1991 J L Eaves.Modern radar theory[M].Zhuo Rongbang,Yang Shiyi,Zhang Jinquan,translated.Beijing:Publishing House of Electronics Industry,1991(in Chinese)
[7]林琪,李智.星间链路天线指向建模与仿真分析[J].计算机仿真,2008,25(7):33-37 Lin Qi,Li Zhi.Modeling and simulation analysis of antenna orientation on inter-satellite link[J].Computer Simulation,2008,25(7):33-37(in Chinese)
[8]Richard C Johnson.Antenna engineering handbook[M].3rd ed.New York:McGraw-Hill Inc.,1993
[9]王祥,杨慧.中继星天线指向控制中捕获参数的确定方法[J].中国空间科学技术,2010,30(2):37-41 Wang Xiang,Yang Hui.Determination method of capture parameters in antenna pointing control of relay satellite[J].Chinese Space Science and Technology,2010,30(2):37-41(in Chinese)
[10]高初,李刚.圆口径正馈抛物面天线的近场分析[J].电波科学学报,2009,24(3):467-470 Gao Chu,LI Gang.On near field of circular aperture normal feed paraboloidal antenna[J].Chinese Journal of Radio Science,2009,24(3):467-470(in Chinese)
(编辑:夏光)
Calibration and Test Method for Spacecraft Monopulse Difference Mode Angular Tracking System
YANG Xianqiang HOU Een CHEN Xiaoqun MIAO Changqing
(Institute of Telecommunication Satellite,China Academy of Space Technology,Beijing 100094,China)
The composition and fundamental theory for spacecraft monopulse difference mode angular tracking system is introduced.According to the correlation between system performance and RE channel phase,a kind of wireless RE(radio frequency)channel phase calibration and tracking function test method is proposed.And this method is realized through user's moving along a scheduled track in a certain range.Based on the method for wireless RE channel,a wired RE channel test method for angular tracking system is put forward.Wired RE channel test method is realized by using signal source to simulate the RE output of antenna with target user being at different position.These methods are validated for their feasibility and validity,which can be applied to the calibration and test for spacecraft monopulse difference mode angular tracking system on the ground to achieve high-precision and stable tracking of angular tracking system to target user.
spacecraft;monopulse difference mode angular tracking system test;phase calibration;radio frequencychannel
V416
A DOI:10.3969/j.issn.1673-8748.2015.03.021
2014-04-08;
2015-01-31
国家重大航天工程
杨显强,男,硕士,高级工程师,研究方向为航天器总体设计。Email:yangxq5142@126.com。
猜你喜欢
汽车工程师(2021年12期)2022-01-17 02:29:46
军民两用技术与产品(2021年12期)2021-03-09 05:38:30
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国交通信息化(2017年10期)2017-06-06 07:13:20
光学精密工程(2016年3期)2016-11-07 09:03:34
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
腹腔镜外科杂志(2016年9期)2016-06-01 12:10:07
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
