基于汽车盲点辅助预警系统的超声波测距模块软硬件设计
2015-10-27 09:58季鑫钟绍华周利涛胡军毛冲冲
湖北汽车工业学院学报 2015年4期
季鑫,钟绍华,周利涛,胡军,毛冲冲
(1.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;2.武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070)
基于汽车盲点辅助预警系统的超声波测距模块软硬件设计
季鑫1,2,钟绍华1,2,周利涛1,2,胡军1,2,毛冲冲1,2
(1.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;2.武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070)
基于超声波原理设计了汽车盲点辅助预警系统测距模块。应用Altium Designer软件设计了超声波传感器发射和接收电路,应用CodeWarrior平台中PE工具设计测距模块的控制策略。实验结果表明:试验测得的超声波探头至障碍物的距离与用卷尺量得的实际距离相近,并且在减小探头与障碍物之间距离的过程中发射和接收信号的时间间隔随之减小,所设计的硬件和软件符合要求。
汽车盲点辅助预警系统;超声波测距;软硬件设计
汽车盲点辅助预警系统是一种安全辅助装置,针对汽车外后视镜存在盲区驾驶者无法观察到车后方障碍物或侧道同行的车辆而设计开发的,主要应用于汽车变道或转弯。其采用测距技术检测外后视镜视野盲区,通过返回来的各种信号确定相对距离,同时将此距离值和设定的危险距离值进行比较,从而通过声音和视觉报警提醒驾驶者,提升汽车的主动安全性。当前主要有红外线、微波雷达、超声波和摄像头等几种测距技术[1],其中超声波测距技术方案具有成本低、响应时间较快、几乎无干扰问题、环境适应性好、便于制作安装的优点,主要应用于短距离测量,因此设计的汽车盲点辅助预警系统的测距模块采用此种方案。对布置在汽车侧面的4个超声波传感器测距模块进行软硬件设计,得到发射和接收信号波形图。
1 超声波测距模块硬件设计
1.1测距系统工作原理
超声波测距的基本思想是用收发一体式换能器发射信号,然后检测发射信号与回波信号之间的差异,从而得出障碍物与超声波换能器之间的距离。所使用的换能器是收发一体式的,自发、自收信号,能较好地适用于汽车盲点辅助预警系统中。常用的方法是相位检测法和渡越时间检测法[2]。
相位检测法在对回波信号进行处理时,需设置较复杂鉴相电路来确定其相位,相位检测法精度虽高,但相应的成本也比较高,测量距离较近,可测量范围为15~70 cm[3],显然,此种方法不适用于汽车盲点辅助预警系统中超声波传感器距离的测量。
渡越时间法由Pellam和Galt在1946年提出[4],其工作原理即从发射超声波时开始计时,直到传感器接收到返回信号,从而可得渡越时间t,由此可计算得出检测的距离L[5-6]。如图1所示,t1时刻开始发射脉冲波信号,其频率在超声频范围,该系统中所选频率为40 kHz,遇到障碍物反射回换能器,在t2时刻被换能器探测到,超声波在空中传播的时间t即接收时刻和发射时刻的差值。根据环境温度τ修正已知超声波在空气中的传播速度c,就可算出障碍物与测量点间的距离。此种方法比较简单、成本低、检测距离范围较大、可测范围为0.39~10.3 m,因此采用此种方法进行距离测量。

图1 渡越时间法测距原理
1.2超声波测距模块硬件电路
超声波测距模块硬件电路设计框图见图2。
1.2.1超声波发射模块电路设计
超声波发射模块电路(图3)由超声波探头(换能器)和激励电路组成。超声波探头是用以发射和接收超声波信号的器件。激励电路使超声波探头工作,为其提供较大功率的脉冲信号,即将一定形式的电压信号加到探头上,而探头中的压电晶片会将电能转成超声波机械能。由此可知,激励信号也会直接影响超声波信号的特性。

图2 超声波测距模块硬件电路设计框图

图3 超声波发射模块电路原理图
超声波发射电路需要满足以下要求:所发射超声波频率为标准的40 kHz,其脉冲信号占空比为50%;驱动能力较高,要有足够的驱动电压;I/O口控制发射。即要求产生具有固定频率,一定脉冲宽度和一定功率的电脉冲去激励换能器,当加载在探头两端的信号频率与其自身固有频率一致时,会发生共振,电信号能比较高效的转换为机械声波,由于所选超声波换能器的固有频率是40 kHz,故激励脉冲的频率也应为此值。
采用中周变压器来构成激励电路,能产生足够的驱动电压,来驱动与中周变压器副边相连的超声波探头。该器件已批量产业化,易于购买且价格便宜,尺寸较小,适用于汽车盲点辅助预警系统。
1.2.2超声波接收模块电路设计
超声波接收模块电路的作用是用来捕捉回波信号,主要由信号调理部分和信号采集部分组成。超声波换能器将回波信号转为脉冲电信号,但单片机无法直接采集此脉冲信号,因为超声波在传播过程中经障碍物反射后会有较大的损耗,回波信号的幅值会随距离的增大而减小,故在信号输入单片机之前,需要对其滤除干扰和噪声以及一定倍数的放大,以求达到最大的信噪比,最后经整形电路之后输入给单片机。为此,接收模块设计了滤波电路、放大电路和整形电路,能精确判断回波信号到达的时间。
1)滤波电路
回波信号放大之前,须将干扰信号滤除,以免将其放大而产生误识别,即放大电路之前须设计带通滤波器,只允许有效频带内的超声波信号通过,抑制有效频带之外的信号,从而有效降低干扰信号带来的影响[7]。选用有源二阶带通滤波器来对干扰信号进行滤除。滤波电路原理图如图4所示。选用运放NE5532来构成带通滤波器,它不仅是双运放,而且具有低噪声和高性能的优点。

图4 滤波电路原理图
图4中电阻R47、R50、R55、电容C44、C47和运放构成一个基本的有源二阶带通滤波器,各元器件参数通过理论计算确定。该滤波器的指标要求即电压放大倍数Au0为20,带宽Δf为5 kHz,中心频率 f0为40 kHz。该电路传递函数为
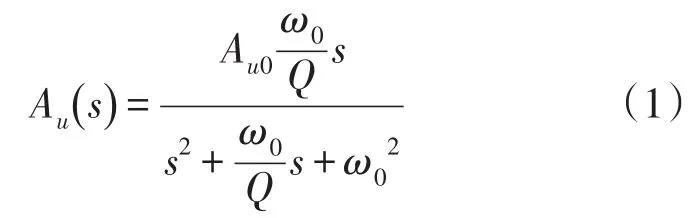
式中:Q为品质因数,计算公式如式(2)所示:

在中心角频率ω0处的电压放大倍数为

ω0和Q之间的关系可用(4)式来表示:

电容值C47可通过式(5)求得:

将C47代入式(4)可得:

将R47代入式(3)可得R50,中心角频率式为

将 f0、R47、R50和C47代入式(7)可得R55。按照上述理论计算得到各元器件的参数值。
2)放大电路
放大电路的主要目的是将有效的微弱电压信号进行一定程度的放大[8],为后续的信号整形做准备。放大电路选用型号为NE5532的集成运放作为电压放大的核心器件,具有更好的噪声性能和较高的小信号增益带宽,电路原理图如图5所示。将运放NE5532设计成反相比例运算电路。电容C25的作用是降低电源的高频噪声干扰;R46和R57的作用是偏置非反相输入端,给该端口提供一个虚拟中间值电压6 V,即上抬电压,放大后的超声波信号以6 V为中间值上下波动,这样可保证放大之后的交流信号质量,而不至于产生信号的失真。

图5 放大电路原理图

图6 整形电路原理图
3)整形电路
回波信号经有源二阶带通滤波器和放大电路之后不能直接被单片机CAP端口识别,还需要在放大电路后增加整形电路,将放大后的回波信号变成能被单片机识别的数字信号,即0 V和5 V的高低脉冲信号。所设计整形电路如图6所示。该整形电路的输入端out与放大电路的输出相连,整形电路的输出信号out0经四通道模拟开关CD4052之后输入到单片机的CAP端口,四路整形输出信号通过模拟开关S1和S2分时选通。二极管D10起稳压的作用;电阻R30和电容C28组成RC滤波电路,滤除干扰信号;电阻R26是一个上拉电阻,三极管Q2在此处相当于一个开关,基极输入电压信号,当输入电压信号大于偏置电压0.7 V时,Q2的集电极和发射极导通,集电极输出0 V电压信号,反之,输出5 V电压信号。
1.2.3测温电路设计
测温电路的目的是在汽车盲点辅助预警系统工作工程中实时监测外界环境温度,单片机根据所测得的环境温度计算出超声波在空气中的传播速度。所设计测温电路选用的温度传感器为负温度系数(NTC)热敏电阻,它的阻值会随温度的上升而下降[9]。测温电路如图7所示,R21为NTC热敏电阻,Temp与单片机AD口相连,热敏电阻的阻值由Temp处的电压U0计算得到,然后根据NTC热敏电阻的R-T特性曲线得出此刻的环境温度值。
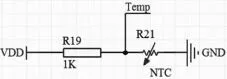
图7 测温电路
2 超声波测距模块软件设计
系统测距模块中CAP中断程序流程图见图8。
采用NTC热敏电阻作为温度传感器来获取当前环境温度,该温度信号为电压模拟信号,经AD端口输入到单片机,根据测温模块电路可通过式(8)在软件中实现电压、电阻和温度的转化:

式中:R21为NTC热敏电阻阻值,热敏电阻值和温度之间的关系式为[10]

式中:T为环境温度,K;B是热敏指数,K;A具有电阻量纲,A和B都是与热敏电阻材料、结构有关的常数,将式(8)代入式(9)并通过温度转换公式:

可求得外界环境温度τ,单位为℃。
超声波在空气中的传播速度受温度影响,声波在空气中的传播速度与温度的关系是

由温度传感器测得环境温度τ,则可在软件中计算出此温度下超声波的传播速度c。

图8 系统软件流程图
系统超声波传感器距离的测量主要是在CAP中断子程序内完成,首先主程序完成初始化任务之后计数器PITCNT0置初值,进入TI2定时器中断,在点火开关、档位和车速信号都满足条件的情况下,PWM端口产生周期为25 μs、占空比为20%的脉冲串,经延时处理之后控制超声波传感器分时工作,内部的计数器PITCNT0开始计数,同时CAP中断使能进入距离计算子程序。
在初始化阶段已经对CAP端口进行了配置,比如捕捉上升沿有效和优先级的大小,进入CAP子程序之后该端口开始捕捉回波信号并进行计数,如果捕捉到6个超声波回波信号,则确认该信号是接收信号,这样做的目的是减小杂波的干扰,从而降低误报率。此时计数器PITCNT0停止计数,根据开始和停止计数的差值可计算出超声波在空气中传播的时间t。
已知在环境温度下超声波的传播速度c和传播时间t,故超声波换能器与障碍物之间的距离可用式(12)来表示:

3 实验结果分析
主板和下板通过线束相连,下板采用四线制,分别为12V电源线、地线、输入信号线和输出信号线,并且主线束和4个探头的分线束之间都有接插件相连,便于对每一路进行调试以及问题的查找。4路探头整体PCB板试验实物图如图9 a所示,单路探头内部电路板结构如图9 b所示。
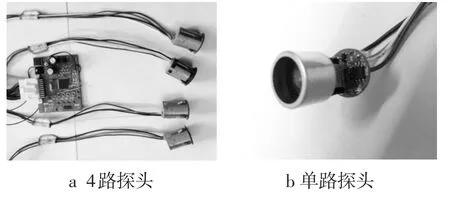
图9 电路板实物图
试验过程中,超声波传感器会发出“啪啪”的声音,这说明所设计的发射模块电路可有效的驱动超声波探头工作。使超声波传感器正对的障碍物为涂有白色涂料的普通墙面,用示波器采集单路探头接收模块中放大电路和整形电路输出端的回波电压信号,此时整形电路的输出为0~5 V的高低电平,放大后的超声波信号以6 V为中间值上下波动,可直接输入到单片机进行数据处理。PCB板试验测到的发射和接收信号波形如图10所示。由于超声波传感器连上线束,波形受到干扰导致部分不规则浮动,对试验结果无影响。其中,放大信号的波形由放大电路输出端测得,整形信号的波形由整形电路输出端测得。
试验在实验室内进行,室内温度为22℃左右;系统供电电源采用AC转DC电源,输入为220 V、50 Hz交流电压,输出为12 V直流电压;由单路探头试验测得的信号波形可知,发射信号和接收信号之间的时间间隔是16 ms,经公式计算可得距离为2.76 m,与用卷尺实测到的距离相差不大,并且在减小探头与障碍物之间距离的过程中发射和接收信号的时间间隔也在减小,因此,所设计的超声波发射和接收模块硬件电路符合要求。

图10 超声波发射和接收信号波形图
4 结论
基于汽车盲点辅助预警系统,设计了一种利用超声波测距原理的测距模块,利用渡越时间法获得超声波发射到接收的时间,设计测温电路对环境温度实时监控,用来修正超声波在空气中的传播速度,最后由软件计算超声波传感器到障碍物距离,根据试验结果进行了测距对比。试验结果证明:该设计具有很高的精度和可靠性,可为汽车盲点辅助预警系统的设计提供准确的参考。
[1]吴妍.汽车倒车雷达预警系统研究[D].武汉:武汉理工大学,2007.
[2]Francis E.Gueuning,Mihai Varlan.Accurate Distance Measurement by an Autonomous Ultrasonic System Com⁃bining Time-of-Flight and Phase-Shift Methods[J]. IEEE Transactions on Instrumentation and Measurement,1997,46(6):1236-1239.
[3]C.F.Huang,M.S.Young.Multiple Frequency Continu⁃ous Wave Ultrasonic System for Accurate Distance Mea⁃surement[J].Review of Scientific Instruments,2010,70(2):45-47.
[4]Jacob,Paravila Monotony.Intelligent Collision Warning System Based on Fuzzy Logic and Neural Network Tech⁃nologies[D].Florida:Nova Southeastern University,1997.
[5]赵广涛,程荫杭.基于超声波传感器的测距系统设计[J].传感器与仪器仪表,2006,22(1):129-130.
[6]B.Audoin,J.Roux.An Innovative Application of Hilbert Transform to Time Delay Estimation of Overlapped Ultra⁃sonic Echoes[C].Ultrasonics,1996(34):25-33.
[7]姚中,虞给扬.滤波电感在电源抗干扰中的应用[J].电源技术应用,1999(5):22-28.
[8]王芳荣,王鼎.汽车电工电子技术[M].北京:清华大学出版社,2009.
[9]H.Araki,K.Yamada.Development of Rear-end Colli⁃sion Avoidance System[J].Conference Proceeding of IEEE Intelligent Transportation Systems,2000,10(7):232-236.
[10]O.Akiyama,H.Konno,D.Inami,et al.Integrated MR Sensors for Automobile[J].IEEE Transactions on Mag⁃netics,1994,30(6):4617-4619.
Software and Hardware Design of Ultrasonic Ranging Module Based on Auto Blind Spot Assist System
Ji Xin1,2,Zhong Shaohua1,2,Zhou Litao1,2,Hu Jun1,2,Mao Chongchong1,2
(1.Hubei Key Laboratory of Advanced Technology for Automotive Components,Wuhan University of Technology,Wuhan 430070,China;2.Hubei Collaborative Innovation Center for Automotive Components Technology,Wuhan University of Technology,Wuhan 430070,China)
Based on the principle of ultrasonic,the distance measurement module of auto blind spot as⁃sist system was designed.The transmitting and receiving circuit of ultrasonic sensor was designed by Al⁃tium Designer,and control strategy of the distance measurement module was designed by the PE tools in CodeWarrior.The experimental results show that the distance between ultrasonic probe and obstacle obtained by test measurement is similar to the actual distance measured by the tape,and the time inter⁃val between the transmitting signal and receiving signal reduces as the distance between the probe and obstacle reduces.Therefore,the hardware and software design meets the requirements.
auto blind spot assist system;ultrasonic ranging;software and hardware design
U463.6
A
1008-5483(2015)04-0026-05
10.3969/j.issn.1008-5483.2015.04.006
2015-08-25
湖北省校企科研合作基金项目(611307931)
季鑫(1993-),男,河南信阳人,硕士生,从事汽车动力学、汽车制动系统及电子驻车制动研究。E-mail:934989575@qq.com
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
教书育人(2020年11期)2020-11-26
河南科学(2020年3期)2020-06-02
科学(2020年3期)2020-01-06
电子制作(2019年11期)2019-07-04
中国交通信息化(2017年12期)2017-06-06
电子制作(2017年7期)2017-06-05
青年歌声(2017年9期)2017-03-15
中国老区建设(2016年6期)2016-02-28
汽车维修与保养(2015年12期)2015-04-18