水下运动声源的方位方差检测方法
2015-10-26 10:11:13陈韶华赵冬艳郑伟
应用声学 2015年1期
陈韶华 赵冬艳 郑伟
(中船重工集团公司第七一〇研究所 宜昌 443003)
水下运动声源的方位方差检测方法
陈韶华†赵冬艳郑伟
(中船重工集团公司第七一〇研究所宜昌443003)
为了提高对水下运动目标的检测能力,利用水下目标辐射信号与海洋环境噪声在空间分布特性上的差异,提出了一种方位方差检测方法。该方法采用时延估计法估计目标方位,对方位求方差以获得检验统计量。采用奈曼-皮尔逊准则,推导了该方法的检测概率关系式,得出了检测性能与信噪比关系曲线,并与宽带能量检测方法进行了比较,表明该方法的性能远优于宽带能量检测方法。理论分析和海上试验结果都验证了该方法的有效性。
水声探测,方位方差检测,宽带能量检测
1 引言
水声探测系统需要在复杂干扰或噪声背景中检测微弱目标信号,提高其检测能力是水声信号处理孜孜以求的目标。经典检测理论先进行过门限检测,确认目标存在后再进行参数估计[1]。对于被动声探测而言,高斯噪声背景中未知高斯信号的最佳检测器是波束形成+宽带能量检测,如果检验统计量过门限,则相应波束指示了目标的方向[2]。在海洋监测等工程应用中,由于平台尺度的限制,经常采用只有几个阵元的小型基阵,此时波束形成效果不明显。
为了提高噪声背景中的目标信号检测能力,文献[3]利用线谱来检测目标,由于海洋声信道的干涉效应与海洋声传播起伏等作用,目标的线谱并非始终稳定存在,因此线谱检测方法通常需结合宽带检测进行[4]。文献[5]利用航船螺旋桨噪声循环平稳性来提高检测性能。文献[6]提出视在方位检测器,利用信号场与混响场在空间分布上的差异,提高了主动声纳CW脉冲回波信号的检测性能。
本文研究海洋环境噪声背景中宽带运动声源的被动检测问题,利用集中声源与海洋环境噪声在水平方位角上扩展的差异,以方位方差为检验统计量来检测微弱目标信号。采用奈曼-皮尔逊准则分析了方位方差检测的检测概率与虚警概率,推导了检测概率关系式,并把检测性能与经典能量检测方法作比较,表明了方位方差检测的优越性。最后,采用海试数据验证了理论分析结果。
2 方位估计原理
以平面四元阵为例,采用时延估计法来估计目标方位。设平面四元阵4个阵元的坐标分别为S1(d/2,0,0)、S2(0,d/2,0)、S3(-d/2,0,0)、S4(0,-d/2,0),如图1所示。
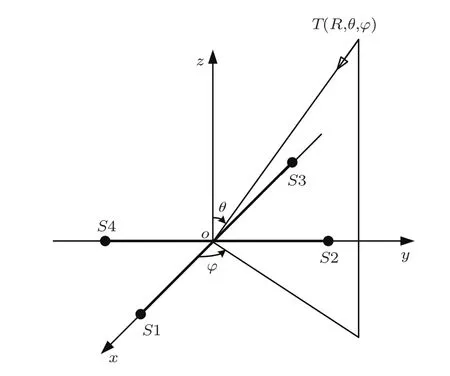
图1 平面四元阵定向示意图Fig.1 Sketch map of bearing estimation with 4-sensor planar array
声源的方位角与俯仰角分别为φ和θ,其中-π≤φ<π,是信号入射方向在xOy平面的投影与x轴的夹角,0≤θ<π是信号入射方向与z轴的夹角。
设阵元3到阵元1、阵元4到阵元2的时延分别为τ31与τ42。考虑远场平面波的情况,可求解声源方位角与俯仰角如下


由于时延τ42与τ31的统计误差特征相同,不妨设其方差均为分析得到时延估计误差引起的φ与θ的估计均方误差为

可见,测向误差与阵元间距d、时延估计误差στ及声源俯仰角大小有关。增大阵元间距,提高时延估计精度,可以减小测向误差。
时延估计的Cramer-Rao下限由下式决定[7]

其中,snr是功率信噪比,f2与f1分别是信号处理带宽的上下边界,T是积分时间。
3 海洋环境噪声方位特性
海洋环境噪声在不同的频段有不同的来源和空间分布特性。在大约500 Hz到几十kHz的宽频带上,测量点附近的海面波浪是主要噪声源,噪声垂直指向性最大值指向海面方向,而其水平指向性各向同性[8]。图2是采用式(1)估计的实测海洋环境噪声的方位角与俯仰角,分析频带1 kHz~3 kHz。可见,方位角在-180°~180°之间大致均匀分布,而俯仰角大约分布在0°~20°范围内,指向基阵正上方即海面附近。对于目标而言,其方位角与俯仰角散布均较小,因此,利用目标与海洋环境噪声在方位角散布上的差异,可以实现噪声背景中目标的检测。
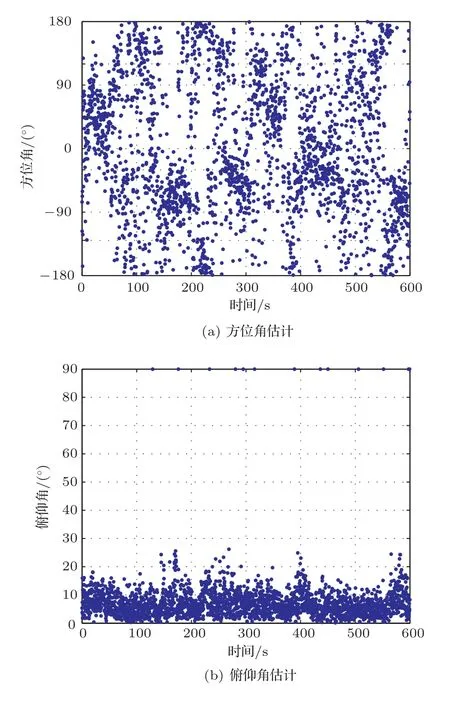
图2 海洋环境噪声的方位角和俯仰角估计Fig.2 Azimuth(a)and pitch(b)angle estimation of ocean ambient noise
根据噪声方位角分布,可以求出其均方误差散布。噪声的方位角φ在360°平面上服从均匀分布,即

式中,H0表示目标不存在。
可以求出噪声引起的方位角估计方差

目标存在时,方位角估计方差由式(2)、(3)计算得到。
如图3所示,处理频带1 kHz~3 kHz,积分时间0.2 s,可得到不同信噪比的目标方位角估计误差,它随信噪比提高而降低。作为比较,画出了采用均匀分布仿真的海洋环境噪声的方位角估计误差,大约在103.9°附近,与理论分析相符。可以看出,即使在-20 dB的低信噪比下,目标引起的方位角估计均方误差也远小于各向同性海洋环境噪声的均方误差。
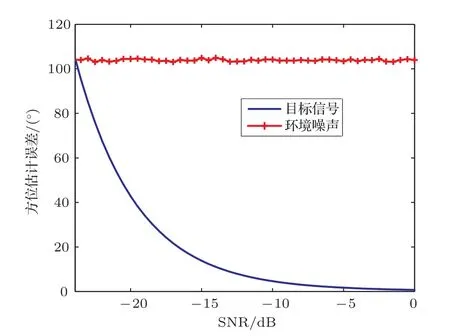
图3 目标与海洋环境噪声的方位估计均方误差Fig.3 Root mean square error of bearing estimation of the target and ocean noise
在有些情况下,海洋环境噪声不是各向同性的,比如在离港口或交通航线不太远的地方,此时环境噪声是一种分布式噪声。根据文献[9],分布式噪声可以建模为在一个角度扇区内均匀分布。即把式(4)稍加修正
式中,φ0≤π。当φ0=π时,即为各向同性噪声;当φ0<π时,是一种分布式噪声。利用式(5),可以计算出分布扇区由2π减小到π/12时,分布式噪声的方位均方差。可见,噪声分布扇区越小,其方位均方差越小,这将引起噪声背景中的信号检测性能下降。如图4所示,当分布式噪声的分布扇区为30°时,噪声方位均方差为8.7°。从图3可知,为了使信号的方位估计均方误差小于噪声的方位均方差,输入信噪比从各向同性噪声时的-23 dB提高到约-13 dB。
不失一般性,下文将分析各向同性噪声背景下的信号检测性能,不同分布式噪声背景下的检测性能可以通过类似的分析方法得到。
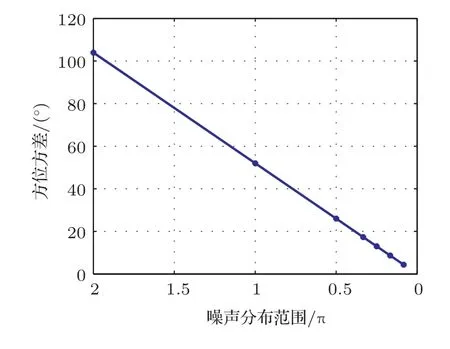
图4 分布式噪声的方位均方差与分布扇区的关系Fig.4 Root mean square error of bearing estimation of distributed noise versus angular sector
4 方位方差检测器及性能分析
根据目标或海洋环境噪声的方位角方差分析,可实现噪声背景中目标信号的检测,称为方位方差检测器,这是一种恒虚警检测器。检验统计量为
目标不存在时,
由于各向同性噪声引起的φ1,φ2,···,φN相互独立,它们的联合概率密度函数为[10]
令
φ1,φ2,···,φN平方和的分布函数为

则y的概率密度函数为
虚警概率为
解得等效门限为

目标存在时,方位角估计φ近似服从高斯分布[6]

检验统计量等价于

y服从中心化X2分布,即
检测概率为
式中,k!表示k的阶乘。
图5给出了方位方差检测器的检测概率与输入信噪比的关系,虚警概率10-5,N=10,其余参数同图3。同时,给出了宽带能量检测器[12]的检测性能曲线。可见,方位方差检测器的性能远优于传统的宽带能量检测器。
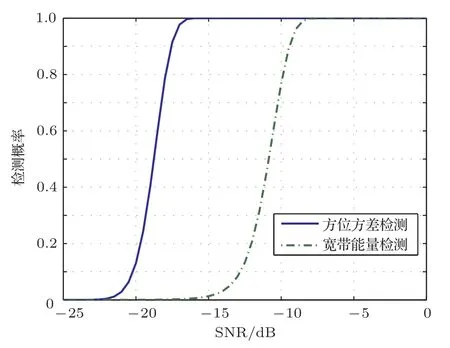
图5 方位方差检测与能量检测性能比较Fig.5 Comparison between bearing variance detection and energy detection
5 海试数据分析
利用2010年1月海上试验数据进行分析验证。试验采用平面四元阵,目标是一条科研试验船。海深大约200 m,水下测量平台深度约150 m,试验时海况约3级,海底为淤泥底质。试验海域附近没有其它船舶,在所关注的频带内环境噪声近似服从各向同性分布。基阵布放在水下平台上,水下平台内装有数据记录设备,目标由远到近通过时的基阵输出信号由数据记录设备采集记录,平台回收后在计算机上处理数据。图6是其中一个阵元接收到的目标通过前后的数据。
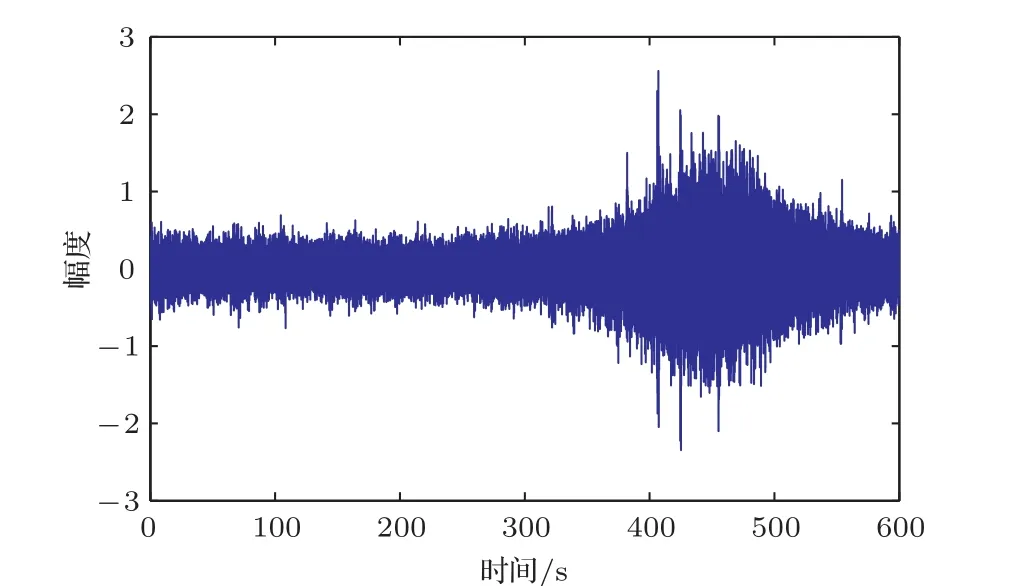
图6 目标通过特性数据Fig.6 Waveform of target passage characteristic
图7是对四元阵接收数据进行波束形成+宽带能量检测的结果,在0°方向形成波束。由于四元平面阵阵元数少,波束很宽,大约80°,波束形成的效果不明显。根据宽带能量检测的ROC曲线,虚警概率10-4,设检测概率为0.9,检测阈为6 dB,大约在340 s处判决目标。
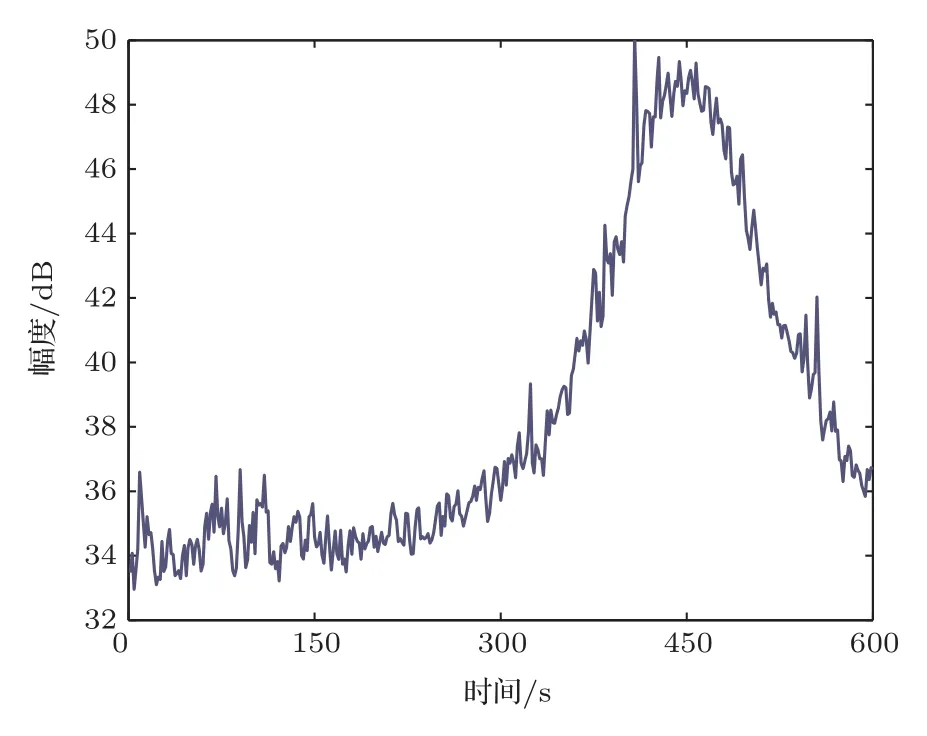
图7 波束形成+宽带能量检测Fig.7 Beamforming and broadband energy detection
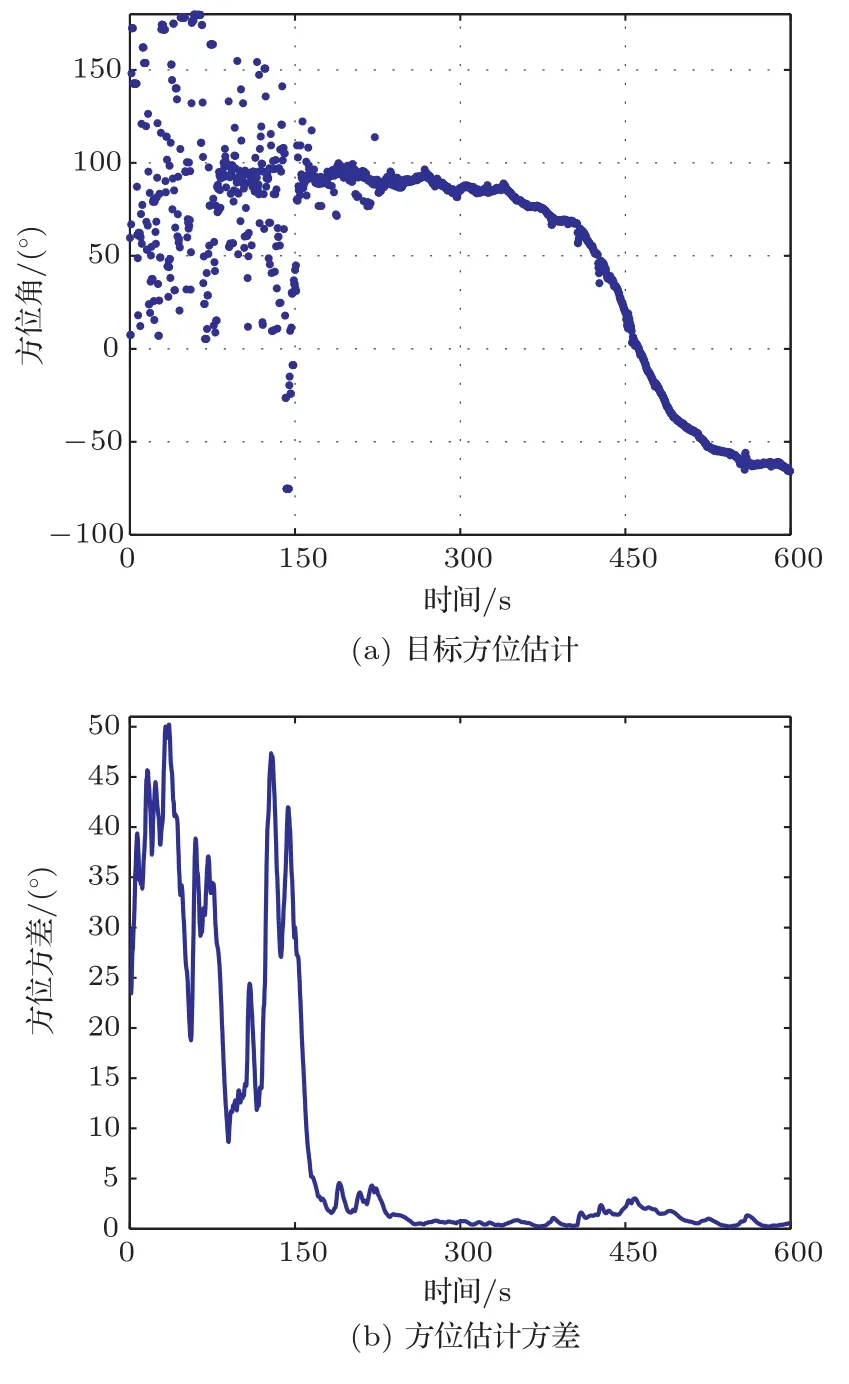
图8 方位方差检测器Fig.8 Bearing variance detector
图8是目标方位估计与方位方差检测器的处理结果,根据第4节的理论分析,虚警概率10-4时,检测门限为5.2,方位方差检测器在160 s可靠检测目标,比波束形成+宽带能量检测提前了大约180 s检测到目标。由图6可见,在160 s时目标信号完全被噪声淹没,表明方位方差检测器具有良好的微弱信号检测性能。
6 结论
本文提出一种方位方差检测方法,通过时延估计法估计目标方位角,根据方位角方差的变化实现运动声源的检测。理论分析表明,在小基阵条件下其性能远优于传统的波束形成+能量检测器。海上试验结果表明,方位方差检测方法比能量检测方法能提前约180 s检测目标,具有更好的远距离检测能力。方位方差检测方法充分利用了信号与环境噪声在空间分布特性上的差异,提高了微弱目标检测性能,实现也不复杂,适合在海洋监测小型化平台上应用。由于小基阵的限制,目前该方法在存在多目标的情况下应用有困难,需要进一步研究。
[1]郑兆宁,向大威.水声信号被动检测与参数估计理论[M].北京:科学出版社,1983.
[2]FILLINGER L,HUNTER A J,ZAMPOLLI M,et al. Passive acoustic detection of closed-circuit underwater breathing apparatus in an operational port environment[J].J.Acoust.Soc.Am.,2012,132(4):310-316.
[3]陈阳,王自娟,朱代柱,等.一种基于频率方差加权的线谱目标检测方法[J].声学学报,2010,35(1):76-80. CHEN Yang,WANG Zijuan,ZHU Daizhu,et al.A detecting method for line-spectrum target based on variance-of-frequencyweight[J].ActaAcustica,2010,35(1):76-80.
[4]解恺,丁雪洁,孙贵青,等.基于目标辐射噪声的信号起伏检测算法研究[J].电子与信息学报,2013,35(4):844-851. XIE Kai,DING Xuejie,SUN Guiqing,et al.The signal fluctuating detection algorithm based on the target radiated noise[J].Journal of Electronics&Information Technology,2013,35(4):844-851.
[5]JEROME A,DAVID H.Detection of surface ships from interception of cyclostationary signature with the cyclic modulation coherence[J].IEEE J.Oceanic Eng.,2012,37(3):478-493.
[6]梁国龙,惠俊英,蔡平.视在方位序列分析[J].声学学报,2000,25(2):134-141. LIANG Guolong,HUI Junying,CAI Ping.Pseudo bearing sequence analysis[J].Acta Acustica,2000,25(2):134-141.
[7]QUAZI A H.An overview on the time delay estimate in active and passive system for target localization[J].IEEE Trans.ASSP,1981,29(3):527-533.
[8]URICKRJ.Principlesofunderwatersound3rdedition[M].New York:McGraw-Hill,1983.
[9]PRABHAKAR S N,RAGHAVAN S.Direction of arrival estimation in the presence of distributed noise sources:Cumulant based approach[J].J.Acoust.Soc.Am.,1995,97(5):2997-3001.
[10]朱燕堂,赵选民.应用概率统计方法[M].西安:西北工业大学出版社,1997.
[11]LI S.Concise formulas for the area and volume of a hyperspherical cap[J].Asian Journal of Mathematics and Statistics,2011,4(1):66-70.
[12]KAY S M.Fundamentals of statistical signal processing,Volume II:Detection theory[M].NJ:Prentice Hall PTR,1998.
Bearing variance detection method for underwater moving sound source
CHEN Shaohua†ZHAO DongyanZHENG Wei
(No.710 R&D Institute,China Shipbuilding Industry Corporation,Yichang 443003,China)
In order to improve the detection capability of weak signal from underwater moving target,a bearing variance detection method is proposed by exploiting the difference in spatial distribution between underwater target radiated noise and ocean ambient noise.The time delay estimation method is applied to estimate the bearing of the target,getting the test statistics by resolving the variance of the bearings.The detection performance versus signal to noise ratio(SNR)of this detector is obtained and detection probability relation is derived based on the Neyman-Pearson criterion.The results show that its performance is far superior to the widely used broadband energy detector.Both theoretical analysis and results in sea trials show the effectiveness of our method.
Underwater acoustic detection,Bearing variance detector,Broadband energy detector
TB566
A
1000-310X(2015)01-0065-06
10.11684/j.issn.1000-310X.2015.01.010
2014-04-09收稿;2014-07-29定稿
陈韶华(1978-),男,湖北武穴人,高级工程师,研究方向:水声信号处理。
E-mail:npuchen@163.com
猜你喜欢
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
电子制作(2018年23期)2018-12-26 01:01:04
测控技术(2018年11期)2018-12-07 05:49:22
中国交通信息化(2017年9期)2017-06-06 07:14:57
海洋科学进展(2016年3期)2016-08-12 06:45:20
工业设计(2016年11期)2016-04-16 02:49:43
中国卫生标准管理(2015年16期)2016-01-20 09:26:15
河南科技(2015年18期)2015-11-25 08:50:14
河南科技(2014年22期)2014-02-27 14:18:12