多相电机控制系统的模块化设计
2015-10-24 05:44梁宝明赵晓宇张颖辉
船电技术 2015年9期
梁宝明,赵晓宇,张颖辉
(武汉船用推进装置研究所,武汉 430064)
多相电机控制系统的模块化设计
梁宝明,赵晓宇,张颖辉
(武汉船用推进装置研究所,武汉 430064)
模块化设计已经成为了多相电机控制系统的发展趋势,通过对不同模块的组合实现了以有限资源适应多相电机控制系统的系列化。本文阐述了模块化设计相比于传统电机控制系统的优势,给出了多相电机控制系统的硬件拓扑,对控制系统的通用化模块进行了详细设计,并通过实验验证了分控制模块同步设计的正确性。
多相电机 控制系统 模块化 并行总线 同步设计
0 引言
模块化设计以其通用化、系列化、标准化,能够以最少的要素组合构建最多的产品品种等诸多优点在工业中得到越来越广泛的应用。传统的电机控制系统面向某一具体产品,是由下而上的设计。模块化设计是面向整个产品族系统,首先由上而下着眼于产品族系统分解和组合所得的通用模块体系。本文所述的多相电机模块化设计方法与传统控制系统相比的优势主要有:采样分散处理,变流模块的模拟信号送到各自对应的控制模块,解决了传统模拟信号采样由CPU执行,采样通道数量固定导致扩展性差的问题;采用背板通用总线形式,模块的种类和数量可根据系统要求进行配置,适应不同相数电机的控制需求,有利于多相电机变频调速装置的系列化;传统控制系统中DSP除了进行核心算法计算外,还要检测、控制外围接口,占用了DSP大量的处理时间,而本文设计的模块均有处理器,各模块将信息处理后再通过并行总线接口与DSP直接交互,不需DSP处理外围接口,DSP只需完成核心算法,减轻了DSP的计算负担,使DSP核心运算的优势得以发挥。
1 多相电机控制系统硬件拓扑
多相电机控制硬件拓扑如图1所示。控制系统采用多种模块通过背板连接的方式完成对多相电机的控制。背板(BD)采用通用总线的方式,可任意配置模块种类和数量,且模块可以插在任意一个模块槽内,具有容错功能。背板的通用总线主要含各模块故障信号、同步信号、转速ABZ信号、模块片选、总线控制信号、地址总线和数据总线。控制系统模块有4种:位置/速度检测模块(SPDM)、监测与操作模块(MCM)、CPU模块(CPUM)

图1 多相电机控制系统硬件拓扑
和分控制模块(SCM)。各模块对输入的转速信号、开关量、温度或电压电流等进行检测和故障判断以及根据CPU的指令对外围设备进行操作或产生驱动信号。
控制系统基本配置为BD(1个)+SPDM(1个)+MCM(1个)+CPUM(1个)+SCM(1个),可实现6相(或以下)电机的控制。当电机相数增加时(如9相、15相等),需要更多的驱动信号和采集更多的电机温度信息,可通过增加SCM和来实现。
2 控制系统的模块化设计
位置/速度检测模块主要实现电机位置或电机转速的数据转换。常见的电机速度传感器有增量式编码盘、绝对式编码盘及旋转变压器。由于不同速度传感器的信号接口不同,SPDM配置了3种转速信号转换电路,分别与上述3种速度传感器输入输出接口相匹配,CPLD将获取的速度信息通过ABZ信号或并行总线发送到CPU模块,如图2所示。
监测与操控模块主要实现设备级的开关状态检测(如断路器开关、熔断器状态等)、设备级开关的操作(如断路器开关、预充电开关控制等)、变流模块和电机温度监测等功能。由于温度信号为非实时性信号,CPLD通过SPI总线来获取温度数据,CPLD内部设置了数据缓冲寄存器,用于存放ADC转换后的数据和开关量状态数据以供CPU模块通过总线读取,同时将CPU模块给定的外设操作数据锁定到该寄存器用于设备操作。当检测到故障时,如过温、状态异常等,CPLD产生一个故障信号,用于其他模块的快速响应。
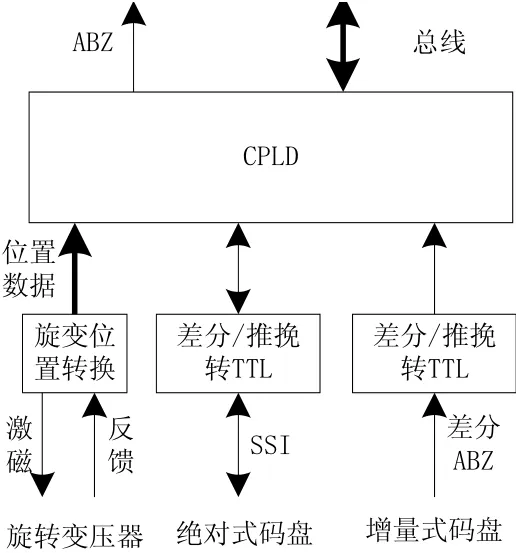
图2 位置/速度检测模块设计框图
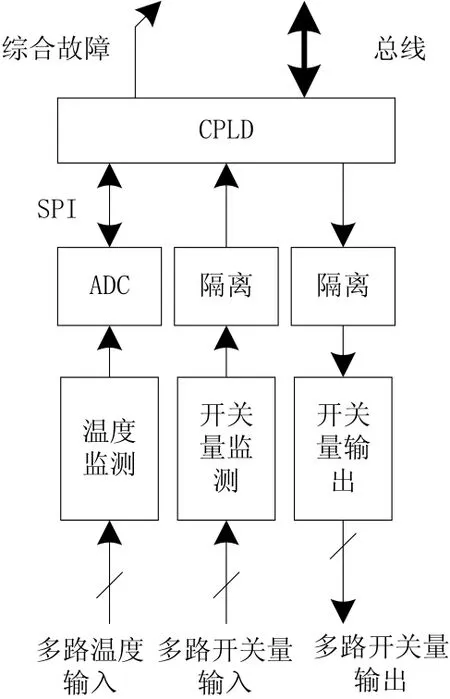
图3 监测与操控模块设计框图
CPU模块是多相电机控制系统的运算核心,主芯片采用DSP。DSP通过总线可获取其他模块的采集数据(如位置数据、设备或电机温度、开关状态、故障信息、电压电流数据等),同时通过总线完成设备操作以及向子控制模块传送载波周期、死区参数、最小脉宽设置和实时调制波数据以实现变流模块中功率器件的驱动。ABZ信号送入DSP的QEP完成ABZ速度信息计算,故障信号送入到DSP的中断引脚,以便设备发生故障时DSP能做出快速响应。DSP的定时器中断到来时,向各子控制模块发出同步信号,以实现各子控制模块载波同步和载波移相,有助于电机振动噪声、谐波抑制等性能提高。
采取模块化设计后,CPU不需要对ADC、开关量输入输出、等待等操作,降低了CPU运算周期,充分利用了CPU资源。
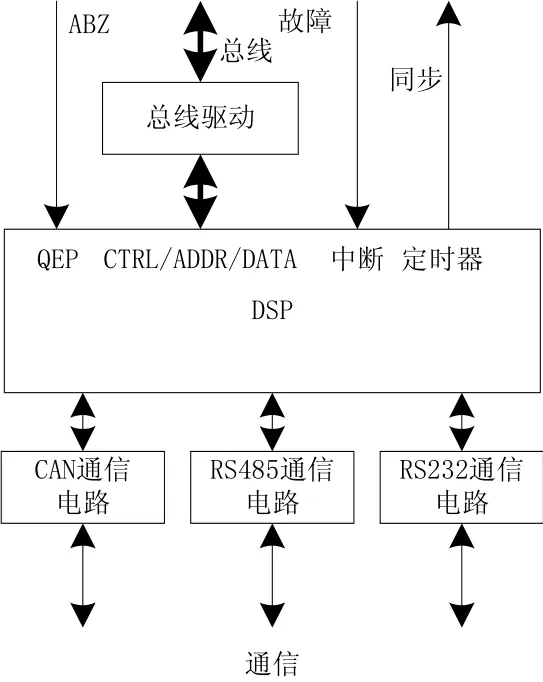
图4 监测与操控模块设计框图
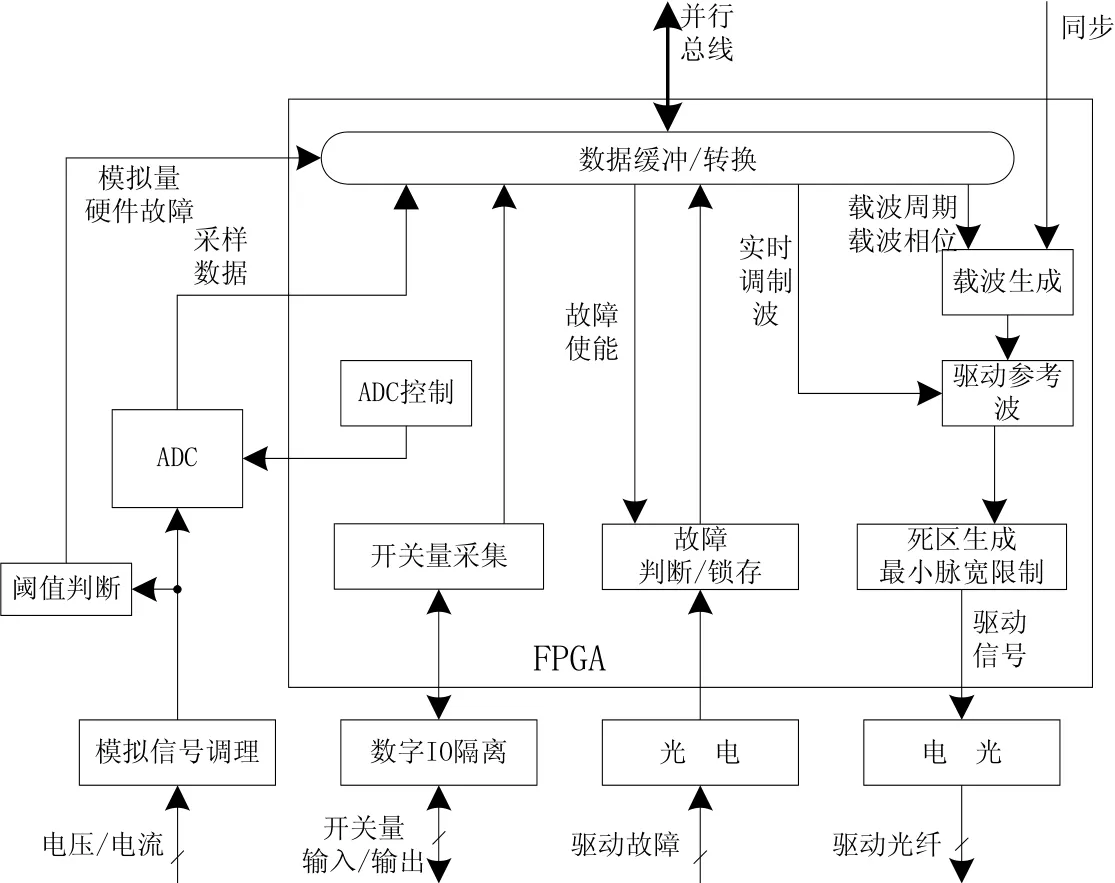
图5 分控制模块设计框图
分控制模块主要实现驱动信号生成、功率器件驱动故障判定、变流模块开关量采集、变流模块电压电流检测与ADC转换、模拟信号硬件报警等功能。CPU模块将载波频率、载波相位、死区时间、最小脉宽、更新点设置等信息通过并行总线传到FPGA的缓冲寄存器,经数据处理后生成驱动所需的载波,与DSP发出的实时调制波相比较产生驱动参考波,FPGA根据死区设定时间和最小脉宽限制对驱动参考波进行处理后生成变流模块功率器件所需的驱动信号,经电光变换后传送到变流模块。功率模块反馈的光纤信号经光电变换后送到FPGA,FPGA根据故障使能对反馈信号进行判断和驱动封锁。变流模块的开关量信号经子控制模块隔离后送到FPGA,FPGA将开关状态信息存入缓冲寄存器后供CPU模块读取。CPU模块将开关量输出信息送入FPGA,FPGA输出的信号经隔离后对变流模块的开关等进行控制。变流模块的电压电流传感器信号经模块的信号调理电路后送到ADC,FPGA完成ADC的操作与数据读取,并将变换模数变换后的数据存入寄存器以供CPU模块读取,同时,为了提高过压或过流的保护速度,模块对过压过流进行了硬件判断并产生故障信号来进行硬件保护。
从子控制模块的功能图可以看出,该模块具备模拟量采样、开关量输入输出、驱动故障检测、驱动生成等功能,与变流模块的所有控制接口相匹配,因此,当增加变流模块时,只需在控制系统中增加子控制模块即可,充分体现了模块化设计的可扩展性。
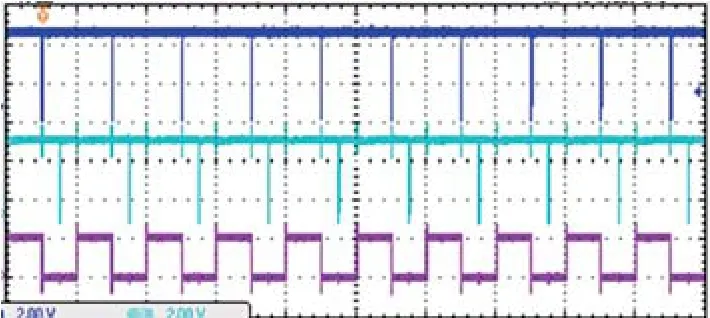
图6 不同分控制模块驱动波形
3 实验
驱动信号的载波同步对于提升电机的振动噪声指标和抑制电机谐波有着重要影响,同步设计也是分控制模块设计的关键。在非同步情况下,不同SCM之间的驱动信号之间的相位会随着时间发生变化。本文对分控制模块的FPGA进行了程序设计,并对载波同步进行了实验测试。如图6波形1和波形2分别是不同分控制模块的输出驱动波形,从图中可以看出二者的载波相位保持着固定角度,验证了载波同步设计的正确性。
4 结论
本文阐述了模块化设计相比于传统电机控制系统的优势,设计了多相电机控制系统的硬件拓扑和模块功能划分,对组成控制系统的各通用化模块进行了详细设计,针对分控制模块载波同步的关键技术进行了试验,验证其设计的正确性和可行性。
[1] 童时中. 块化原理设计方法及应用[M]. 国标准出版社,2000.
[2] 张俊谟. Soc单片机原理与应用一基于C8051F系列[M]. 北京:北京航天航空大学出版社,2009.
[3] 薛山.多相永磁同步电机驱动技术研究[D].北京:中国科学院研究生院,2005.
[4] 侯立军,苏彦民,陈林等. 多相感应电机调速系统的发展现状和应用前景[J]. 微电机,2001,34(5):42-44.
[5] FERREIRA C L,BUCKNALL R W G.Modelling and realtime simulation of an advanced marine full-electrical propulsion system[C]. Power Electronics,Machines and Drives,PEMD'2004.Edinburgh,UK:IEEE,2004:574-579.
Modularized Design of Polyphase Motor’s Control System
Liang Baoming ,Zhao Xiaoyu, Zhang Yinghui
(Wuhan Institute of Marine Electric Propulsion,Wuhan 430064,China)
Modularized design becomes a trend in development of polyphase motor control system, which implements serialization of polyphase motor control system by limited resource through combination of different modules. This paper exposes the dominances of the modularized design compared with traditional motor control system , designs a hardware topology of the control system and the various modules in detail , and verifies the correction of the synchronous design by experiments.
polyphase motor; control system; modularized; parallel bus; synchronization
TM343
A
1003-4862(2015)09-0033-04
2015-07-09
梁宝明(1979-),男,工程师。研究方向:电力电子与电力传动。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
都市快轨交通(2022年2期)2022-06-28
海洋信息技术与应用(2022年1期)2022-06-05
电力设备管理(2022年7期)2022-05-31
中国惯性技术学报(2020年2期)2020-07-24
现代装饰(2020年5期)2020-05-30
汽车与新动力(2019年5期)2019-11-07
水利水电工程设计(2019年4期)2019-02-14
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14