旋转型压电惯性冲击马达的工作特性及其应用略述
2015-10-21 19:08邓茂星
建筑工程技术与设计 2015年17期
关键词:应用
邓茂星

【摘要】通过实验研究可知,此马达的旋转速率和传动信号的频率、电压亦即信号的强度存在着正比例的关系,和主体与配重的比值存在着反比例的关系,转动速率依压电部件进出电的时间延长而降低等。对各运行参数及应用过程进行了相关的描述。
【关键词】惯性冲击马达:压电马达;旋转过程;运转特点;应用
引言
惯性冲击马达系一类依托压电部件瞬间形变而发出的推动力来冲破摩擦阻力,进而完成使载荷发生空间位移的动作装置。此马达通常由三个部分组成,即:主机体、压电部件及配重物体。基本是凭借压电部件引发运动过程,所以,应当把它归类于压电马达范围。在物体精细位置确定及微波纳米技术控制行业具有极大的运用需求,且凸显出强大的优势。其已经被具体运用到寻描探针光学、微型运转臂、袖珍仿造机器人、精细工业部件加工作业台等工业制作范畴[1-2]。
现阶段对惯性冲击马达研发已经积累了丰富的档案性珍贵材料,但这些材料的所涉及的内容中不管是属于基础性知识研究领域还是实验性科学检测领域,基本上都是围绕着直线性构架,其已涵盖模型构建、仿真制作、试验应用及非线性课题研究等范畴[3-4]。而针对旋转型机构马达的科学研究工作却明显较少,且有关这一方面的研究资料几乎微乎其微[5-6]。而且相当的不完整、不详细。在现实阶段中,以一类基本的运转模式,旋转形式在精密装置和仪器中的应用规模相当大,例如,空间多维度工业部件加工作业台、光线通路微调仪器、精细加工自动控制机床、仿真机器人转动部位等。虽然旋转类惯性冲击马达的驱动机理和直线型构造极为近似,然而,因为测试手段及编制思想存在着很大区别。欲赋予旋转性构架的拟制以理论依托及参照资料,在此拟制了一款旋转类惯性冲击马达装置,且就它的旋转的特殊规律性进行了周密的研究。
1、运转机理及实验设施
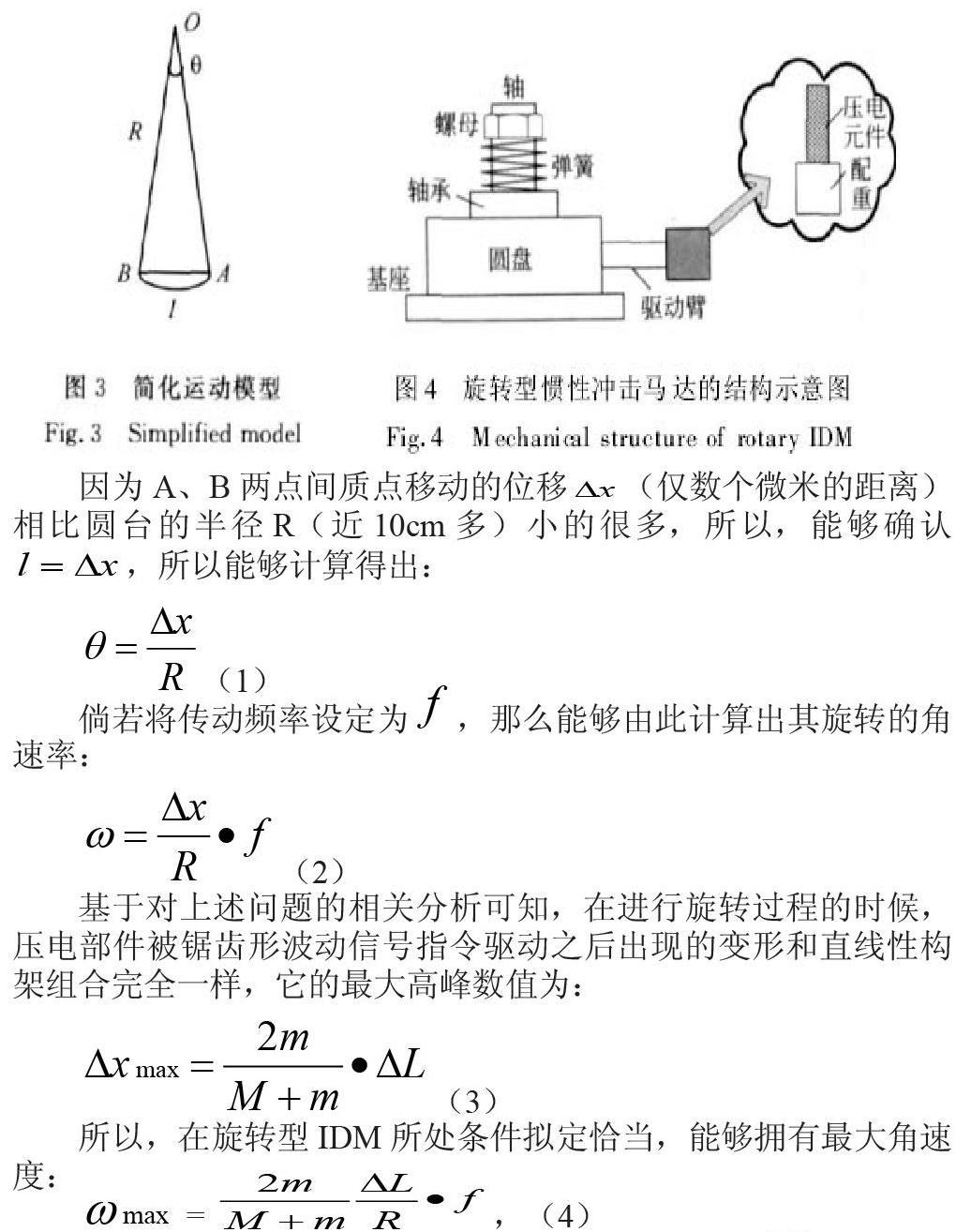
旋转类惯性力冲击马达的运转机理和直线性构架大体相近,图1、图2、图3各自代表其运转过程的工作机理、组成构架、传动指令信息和仿真运转模型。此马达包括运转主体、平衡配重、压电部件和传动臂四个主要部分。如图中所示,再给旋转型运动装置通入类似锯齿形的的波动电压信号时,其压电部件开始先逐渐匀速向外延伸,到一定程度之后瞬间之内又迅速缩进,由此造成主体圆盘在压电部件赋予的惯性冲击力的驱使之下,出现向反时针方位的一段距离移动,倘若赋予向反方位的传动信息指令,此时圆盘就开始向顺时针方位转动。压电部件属于一套压电组合器件,此器件靠数个细质瓷片粘连组装而成,在电路设置上是属于并联系统,在机械组装上是属于串联结构。
拟设历经一个循环的锯齿形波动信号的通入和传动,传动臂终极端顶质点从A点移动至B点,见图3所显示,它所产生的位移为AB( )两点距离,然而这一质点实际移动的轨迹是属于一段弧线,设取其弧的长度是 ,那么 。
其式中 系圆台的重量, 系平衡配载重量, 系压电部件的变形幅度量, , 系压电指数, 系传动电压波动幅度数值。
通过前述解析,编制出一台旋转型惯性冲击马达装置(见图4),此运转器件是依照图1编织出来的,区别之处系其能够提前产生一定的压力以便可获取尽可能高的运转速率。此可提前付出压力的部件设置于运转主体部件上侧,其靠压力弹簧、螺丝母及普通型号轴承组合构成。它可靠旋转螺母来改变压力弹簧的输出弹性压力,从而可调节施加在部件上的预压力。转动轴承置于压力弹簧的下部,它能把轴向存在的压力均匀分布到圆盘的中心区域,还能降低压力弹簧对圆盘旋转运动过程的摩擦阻力,从而减小振动给圆盘旋转带来的不利作用。
2、实验效果和讨论
2.1角速率和传动频率的关联效果
此旋转惯性冲击马达装置,当其传动电压设定值为五十伏特状态下时,其可获取的角速率与输入频率呈曲线形的函数依赖关系,依托相互比较能够观察到在输入频率小于一千赫兹情况下,经过试验测得的数据结果和理论运算结果总体上维持相同,其函数曲线显示直线性升高态势,角速率和传动频率显示正方向关联。在输入频率大于一千赫兹时,其运转的角速率开始逐步高于理论运算结果数据,然而到一千二百赫兹时即转为迅速下降,此乃由于部件振动原因造成的。
2.2角速率和传动电压的关联效果
角速率和传动电压之间呈函数曲线关系,其理论计算数据和实验测得结果数据都为当传动频率是一千一百赫兹的条件之下所求得的。实验证明,实验测试所得数据与理论运算所得数据大体上相同,在电压升至六十伏特时,其角速率基本上可达到2度每秒。
3、 我国压电驱动器发展及应用现状
我国对压电驱动技术的研究起步较晚,我国近年来在压电驱动的
研究及应用方面取得了一定的成果。
中国科学院长春光学精密机械研究所研制了用于精密工作台上的压电陶瓷微位移驱动器,以压电叠堆作为驱动元件。其作用是对工作台的微动台进行驱动,目的是为了解决工作台定位的准确性,在驱动粗动台运动的过程中微位移驱动器不工作,粗动台的运动由计算机控制伺服电机来实现,当工作台以低速将要达到或通过定位点时,微位移驱动器投入工作,由于压电陶瓷微位移驱动器的响应速度快,在伸长和缩短过程中无机械噪音和振动,每脉冲的位移当量可根据要求做得十分精细。上海交通大学研制了多种用于驱动管道机器人的压电驱动器,如弹性足式压电驱动器等。总之,压电驱动器在国内光学、医疗与生物、精密器具制造及农业等多个行业均得到了广泛的应用。
结语
本文研究了RIDM的工作原理,推导了角速度的表达公式,对马达的运动性能进行了测试分别研究了该马达的角速度与驱动频率、电压、充放电时间、转矩、M/m之间的关系,以及正反转之间的区别,并对相关的实验现象进行了分析和解释。总结国内外的发展情况,压电驱动器大致可分为叠堆型、双晶片型、钹型、虹型及弹珠型等,它们广泛应用于机械、光学、生物工程、农业等各个领域,据有关反发展前景。
参考文献
[1]古谷克司.1991年度日本精密工学会春季大会学术讲演会讲演论文集[C].大阪:1991.
[2] 刘建芳,杨树臣,杨志刚,等.新型压电精密步进旋转驱动器研究[J].光学精密工程,2006,14(4):594-601.
[3]陳西平.压电型惯性冲击式运动机构驱动理论和试验研究[D].长春:吉林大学,2003.
[4]谢F S,摩尔I E,亨克尔R T.机械振动——理论及应用[M].沈文均,张景绘译.北京:国防工业出版社,1984.
[5]王彬.振动分析及应用[M].北京:海潮出版社,1992.
[6]姜楠,刘俊标.旋转型压电惯性冲击马达的工作特性[J].光学精密工程,2009,17(2):350-355.
猜你喜欢
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
考试周刊(2016年76期)2016-10-09
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29