动中通天线自动跟踪系统结构及刚度研究
2015-10-21 19:23陈东坡
中国机械 2015年7期
关键词:刚度
陈东坡

摘要:“动中通”天线自动跟踪系统,采用两轴稳定平台,安装一个抛物面环焦天线。具有ka和ku两个波段。在车辆运动或静止时,天线实时跟踪同步地球卫星,实现地面车辆和卫星通讯。
本文介绍结构设计、系统刚度研究等方面关键技术。
系统采用A-E型双轴转台的通用结构形式,方位轴、俯仰轴可以自由转动,俯仰轴承载一个支撑座,天线、IMU及其控制电路安装在支撑座上。天线极化方向通过控制馈源旋转解决。
系统采用等刚度设计原则,为了提高结构刚度,降低重量,选用比强度和比刚度高的材料;优化设计结构形状,合理布置各搭载部件的位置,减小转动体的转动惯量;对转动轴进行静平衡设计,使质心落在轴心,减少配重块的质量;采用合理的散热措施,避免赋形环焦天线局部受热变形。
关键词:“动中通”;稳定平台;自动跟踪;刚度
1.概述
1.1国内外研究动态
“动中通”天线自动跟踪系统,在车辆运动或静止时,控制天线实时跟踪同步地球卫星,实现运动车辆和同步地球卫星信号传输。
“动中通”系统工作原理是,车辆在移动过程中,由于其运动姿态和地理位置发生变化,会引起卫星天线偏离卫星,使通信信号减弱甚至中断,因此必须对车体的这些变化进行隔离,同时通过卫星上信标信号完成天线漂移修正,使天线始终对准通讯卫星,实现移动状态下的不间断通讯[1] [2]。
目前国内外研究和生产动中通的单位较多,主要研制单位有:重庆航天新世纪卫星应用技术有限责任公司、重庆巴山仪器厂、中电集团第39研究所、航天恒星科技股份有限公司、北京爱科迪信息通讯技术有限公司等。
1.2 系统组成
“动中通”天线自动跟踪系统由赋型环焦天线、稳定平台、控制部分组成。里程计信息、GPS信息由总体提供。赋型环焦天线安装在稳定平台上。
稳定平台对于“动中通”系统是至关重要的,必须严格隔离车体角运动,隔离程度越高越好。
稳定平台采用A-E两轴结构,包括方位环和俯仰环,每个环上装有旋转变压器和力矩电机。方位环在外面,加装导电滑环,可以方位360°任意角度转动;俯仰环在里面,天线安装在俯仰环支撑座上,可以自由俯仰,角度范围13°~95°。
系统的惯性测量组件(IMU)包括三个光纤陀螺仪和三个加表,安装在俯仰环支撑座上。天线也安装在俯仰环支撑座上,因此IMU与天线固联,可以使用同一坐标系。
光纤陀螺仪电路简单,直接输出数字量,无需交流电源和力反馈等外置电路,方便系统调试和维修。光纤陀螺仪模型简单,在倾斜状态下寻北精度可以达到±0.3°。相对机械陀螺,光纤陀螺仪可靠性高,平均无故障时间达20000小时,适合于长时间工作;光纤陀螺仪抗震性能良好,适合与车载越野环境[3] [4]。
系统馈源轴装有旋转变压器和力矩电机,用于控制天线馈源的位置。工作过程中,馈源轴处于位置伺服状态,系统根据横滚陀螺仪Gy和X加表测量车体横滚运动,稳定馈源轴。
2.结构概述
2.1 组成
结构设计分为天线组件、方位环架、俯仰环架、惯性测量组件(IMU)等部分组成。
系统采用双轴转台的结构形式。俯仰轴承载一个支撑座,賦形环焦天线、IMU及其控制电路安装在支撑座上。方位轴、俯仰轴可以自由转动,通过稳定平台可以隔离车体角运动。通过计算和控制,这种双轴转台可以实现双轴稳定平台,从而实现天线电轴指向和对准卫星。天线极化方向可以通过控制馈源旋转解决,而不必通过天线整体旋转的方法解决。根据卫星信号的极化方向调整馈源轴,使赋形环焦天线的极化方向与卫星保持一致。
2.1.1惯性测量单元(IMU)
惯性测量单元(IMU)由支架、三只光纤陀螺、三个加表、一只温度传感器等组成。支架上留有安装基准或销钉,便于安装在支撑座上,并保证互换性。三个光纤陀螺正交放置在支架上,光纤陀螺的插件和输出电缆应符合电磁兼容要求,电缆首先进入支架内部,再由IMU插件转接到外部伺服控制组合。支架采用中空结构,内部安装加表支架,加表支架上安装三个加表,信号线也由IMU插件转接到外部伺服控制组合,有利于加表的电磁兼容。用金属盖板把支架封闭,统一设计一只IMU插件,陀螺、加表、温度传感器的信号都通过插件转接到外部伺服控制组合。
2.1.2支撑座
支撑座是一个装配平台,赋形环焦抛物面天线、惯性测量单元、伺服控制组合、微波器件等装在支撑座上。支撑座内侧采用平底碟形结构,赋形环焦天线组件通过法兰固连在支撑座上。支撑座外侧安装两个半轴,通过轴承与U形方位框架连接。支撑座采用铝合金材料。为了增加支撑座的结构刚度和减轻重量,综合考虑支撑座的质量分布,布置支撑座上的加强筋。
由于安装在支撑座上方的天线组件较重,为了减少配重,设计支撑座的质量分布,把加强筋放在上部,这样也符合支撑座的受力情况。上部承受压应力,下部承受拉应力。
在设计波导管时,尽可能减少波导管的折弯次数,减小波导管的长度,能够减少微波在传递过程中的损失。
2.2 基准设计
2.2.1方位基准及方位电机旋变的零位对准
在底座侧面的小平面上和U形方位框架上分别安装对准工装,通过光学仪器调整底座和U形方位框架上的两个基准面平行,通过工装使U形方位框架和底座固连。调节方位电机和方位旋变的零位。调整完毕后固定方位电机和旋变。
2.2.2俯仰基准及俯仰电机旋变的零位调整
在图5所示轴端安装调试工装,可通过光学仪器对准,使支撑架水平或与水平面45°夹角(零位),调整俯仰电机和旋变的零位,然后安装固定。
2.3 静平衡设计
根据控制要求,需要对俯仰轴、方位轴等,进行静平衡设计。馈源轴是一个回转体,轴上装配的元器件均为环形对称结构,只需进行静平衡测试即可。
3.结构刚度研究
3.1 结构刚度概述
车辆在行驶的过程中,会受到路面的影响,而产生冲击和振动,车内发动机、车载其它设备和乘员等也可能产生周期性或随机的冲击和振动。
结构在动载荷作用下,总要产生一定的振动响应,结构振动常是结构损坏、环境恶化、设备精度和可靠性降低等工程事故的主要原因[5]。因此研究结构的动力特性和动力强度,已日益成为结构设计中的重要课题。
本课题研究时,用有限元法对平台系统中的关键件的结构谐振频率进行仿真分析。
3.2 结构刚度分析
3.2.1惯性测量单元(IMU)组件的振动模态
IMU组件是系统的核心,垂直正交装有三个高精度光纤陀螺和三个加速度计,其刚度直接影响到系统的精度和平台的稳定,一阶谐振频率为953Hz,其它阶次的谐振频率均比一阶高,能够满足系统要求。
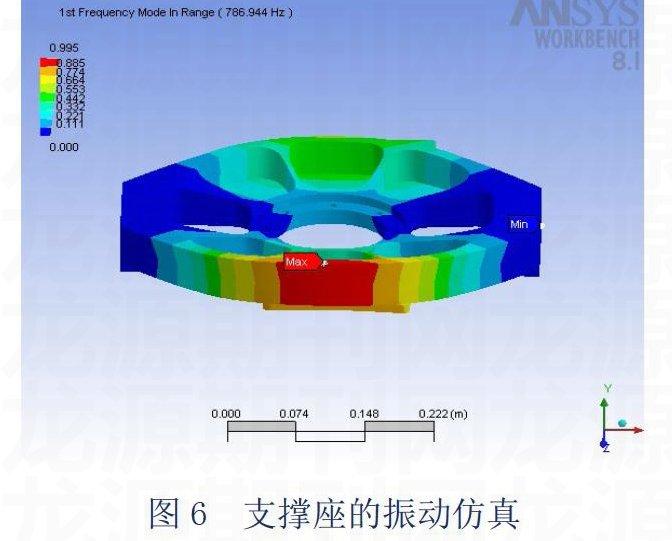
3.2.2支撑座
支撑座是稳定平台的载体,赋形环焦天线、IMU组件、伺服控制组合等组件均装在支撑座上。其一阶谐振频率为786Hz。
3.2.3赋形环焦天线
赋形环焦天线的谐振频率较低,可根据试验情况决定是否采取减振措施,以防随系统共振。
3.2.4 U形方位框架
U形方位框架連接方位轴和俯仰轴,其结构刚度直接影响系统的支撑刚度。为了提高结构刚度,减小重量,采用比刚度高的铝合金材料,采用中空结构形式,在合适的位置设置加强筋,同时考虑铸造的工艺性,采用分体式结构。
经过多次优化设计,该组件的最低谐振频率大于300Hz,能够满足设计要求。
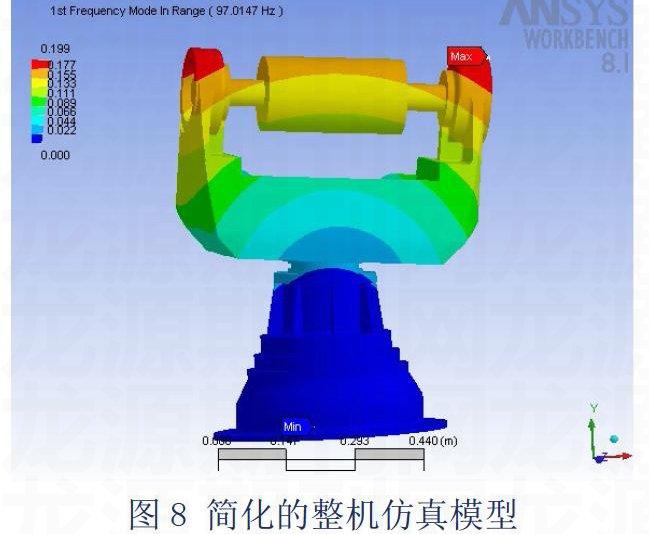
3.2.5装配体的模态分析
用模拟负载法对整机进行简化,进行了振动分析,见图8简化的整机仿真模型。用一个模拟负载代替赋形环焦天线组件,重量和赋形环焦天线组件相同。一阶谐振频率为97Hz。
通过分析和计算,装配体在不安装赋性环焦天线和微波组件时的最低谐振频率应在80~100Hz之间,能够满足稳定系统对结构的刚度要求。装配赋形环焦天线后,系统的最低谐振频率大于60Hz。能够满足微波通讯的要求。
4.结论
本文主要研究了动中通天线自动跟踪系统的关键问题:结构及刚度。结构形式决定结构刚度,小型化及轻量化是结构设计永远的追求目标。刚度提高也有助于系统精度的提高。精确控制阻力矩,能够使结构更优化,降低系统的转动惯量,提高系统的精度,减少响应时间,满足使用要求。
参考文献
[1]牛传峰,杜彪,韩国栋.等.低轮廓动中通天线 中国电子科学研究院学报,2013年4月.第2期149~155
[2]姜军,陈庆伟,郭健.等.两种动中通自稳定结构比较研究 南京理工大学学报 ,2011年10月 第35卷.第5期 681~686.
[3]吴文敬,谷志慧,高悦.小型动中通应急指挥车的设计与实现 现代电信科技, 2013年5月第5期 35~42
[4]许道峰,何纬.载体运动对动中通天线指向影响 指挥信息系统与技术 2012年6月 第3卷. 第3期 59~62.
[5]李岩.光电稳定跟踪装置误差建模及评价问题研究[博士学位论文]长沙:国防科学技术大学,2008年1月.
猜你喜欢
建材发展导向(2017年1期)2017-03-24
建筑科学与工程学报(2016年5期)2016-11-09
科技与创新(2016年13期)2016-07-22
科技视界(2016年15期)2016-06-30
科教导刊·电子版(2016年3期)2016-03-14
科技与创新(2016年2期)2016-01-19
科技视界(2015年25期)2015-09-01
科技视界(2015年25期)2015-09-01
大陆桥视野·下(2014年2期)2014-03-18