PLC控制的工业机械手在自动化生产线中的应用研究
2015-10-21 19:23张毅
中国机械 2015年7期
张毅

摘要:工业机械是一种先进的机械设备,其在现代工业中应用比较广,而且对机械设备自动化生产有着促进作用。本文对基于PLC的工业机械手在自动化生产线中的应用进行了介绍,希望可以帮助工业企业的工作人员更好的掌握机械手控制技术,制定出性价比高、编程简单的应用方案,促进现代化工业企业可以更好的发展。对机械手的控制有软、硬件两种不同的方式,在选择时要结合工程实际情况,这样才能提高工业机械手应用的效率以及质量。
关键词:PLC;工业机械手;自动化;生产线;控制
工业机械手是一种可以模仿人手进行操作的机器,在设定程序后,工业机械手可以完成指定的动作,可以按照一定轨迹代替人手进行工作,其可以完成简单的抓取动作,还可以搬运货物,是一种可以从事焊接、装配等工艺的机械设备。在现代工艺自动化生产线上应用机械手,可以代替人进行重复劳动,而且提高了工作效率,其可以在危险的环境下进行作业,可以有效降低工业生产中安全事件出现的概率,还可以保护工业企业员工的人身安全。基于PLC工业机械手的控制系统,具有造价低、效用高的优点,在不断改进的过程中,还可以提高系统的通用性。
1.工业机械手概述
工业机械手是现代工业机器人的一种,在提高社会生产力水平方面发挥了非常积极的作用。尤其是工业自动化生产线中,机械手更是一个不可或缺的重要设备。例如在机械制造业的生产线上,机械手可以实现自动化的工件装卸与搬运,大大的提高了生产线效率,节省了大量的劳动力成本。近些年,PLC技术逐渐被应用在工业机械手的结构模块设计中,进一步的提高了机械手的自动可控性与可靠性。目前较为常用的几种工业机械手主要有ABB、KUKA、FANUC、MOTOMAN等几种类型的机械手。
2.PLC的概念及其应用
所谓PLC,就是指可编程控制器,其核心是微处理器,主要利用了数字运算技术和计算机编程技术,能够形成一个可以通过设定程序而进行自动化控制的电子系统装置。目前PLC在工业设备上的要应用已经十分广泛。而PLC之所以会有如此广泛的应用,在很大程度上是因为其具备较强的应用优势。即其不但具有很强的抗干扰能力和较高的可靠性,而且其控制系统的结构较为简单,编程设计方便简单,能够在多种机械设备中应用。另外,在后期的运行中,PLC无需进行复杂的维护,只需要简单维护,并根据需要对编程进行改进即可。
3.PLC控制的工业机械手在自动化生产线中的应用
3.1工业机械手的工作原理
机械手控制系统的运转是一个不断循环的过程,起点一般是机械手的左高位。机械手在左高位启动后会先出现下降动作,在下降到工件位置后会自动停止,还会将工件夹紧,并搬运到指定位置。在夹住工件后机械会上升,在上升到固定位置后向右偏移,移动到设定位置后会继续下降,然后将工件放到设定好的位置上。在完成这项动作后,机械手会继续重复这一组动作,不断的循环,直到完成所有搬运的工作。机械手控制与设定的PLC程序有较大关系,一般机械手多进行一些简单的夹紧以及搬运工作,所以在对其进行PLC程序设计时,一定要控制好其运动轨迹。
3.2 PLC控制機械手的控制方案设计
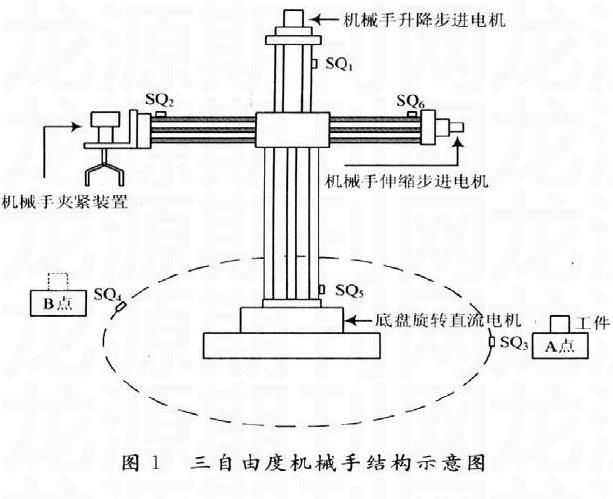
以某工厂自动化生产线中所使用的机械手为例,其主要结构是由机械手手臂、步进电机以及工作台组成,其中机械手的手臂伸张转动、手爪的张合抓放均是以步进电机为主要驱动。其中水平和垂直的操作均是由步进电机来控制,而机械手底盘的旋转则是由总电动机来控制,抓取物体时对电磁阀的控制则采用气动形式。该机械手在本生产线中主要起到工件传送的作用。在PLC控制系统设计中,我们根据传送动作的先后顺序编写了相应的控制编程,来实现对各个结构的控制。另外,为了使动作准确,机械手安装了限位开关SQ1,SQ2,SQ5,SQ6,分别对机械手进行下降,上升,右行,左行等动作的限位,并给出了动作到位的信号。SQ3,SQ4为原点位置和终点位置的光接近开关,如图1 所示。
3.3气动机械手PLC的控制要求
①气动机械手的升降和左右移动分别由不同的双线圈电磁阀实现,电磁阀线圈失电时能保持原来的状态,必须驱动反向德线圈才能反向运动。②上升、下降的电磁阀线圈分别为YV1、YV2;右行、左行的电磁阀线圈为YV3、YV4;③机械手的夹钳由单线圈电磁阀YV5来实现,线圈通电夹紧,断电松开;④机械手的夹钳的松开,夹紧通过延时1.7s实现⑤机械手的限位由行程开关SQ1、SQ2、SQ3、SQ4来实现。
3.4机械手的具体工作流程
PLC控制的工业机械手的具体工作流程,如图2所示:
图2中为一个将工件由一处传送到另一处的机械手的工作流程,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。设备装有上、下限位和左、右限位开关。
3.5系统的软硬件设计
在该机械手的工作运行中,软硬件的设计是非常关键的影响因素。一般在PLC控制的工业机械手的硬件设计上,要特别注意做好输入、输出点地址的分配以及PLC外围接线的方法。而在软件设计上,则应特别注意编程的流畅性与可靠性,以免降低机械手的灵活性。
3.6机械手在应用中的维护
PLC控制的机械手在执行系统设置的各项工作时,动作完成情况与控制器的灵敏度有较大的关系,所以,设计人员一定要控制好控制器的位置,这样才能保证机械手完成各项工作。当控制器出现故障后,检修人员一定及时的维护或更换。为了不影响工业生产,工作人员需要提高效率,在按下起动按钮后,机械手会进行单周期的运动停止,这可以保证维修的安全性,在按下暂停按钮后,对机械手的操纵也会自动停止,而再次按下启动按钮必须是手工操作才能执行,工业机械手会返回起点重新工作,继续单周期运作,进行循环操作。另外,为了保证机械手的正常运行,技术人员还需要对控制系统进行完善,对机械手进行定期检修。
4.结束语
本文对基于PLC的工业机械手在自动化生产线的应用情况进行了介绍,工业机械手是一种先进的机器设备,其可以代替人手进行搬运等操作,可以在危险的环境下作业,不但提高了作业的工作效率,还保证了工作人员的人身安全。为了保证工业机械手发挥最大的效用,需要提高其设计以及制造的水平,相关技术人员一定要不断的完善设备,增强工业机械手的功能以及性能。基于PLC的控制系统想要稳定的运行,一定要做好硬件与软件设计工作,将工业机械手应用在现代工业自动化生产中,是工业发展的必然趋势,对提高工业企业的经济效益有着促进作用。
参考文献:
[1]张海英.基于PLC的气动吸盘式工业机械手设计[J].液压气动与密封, 2013(03)
[2]郭艳萍,张超英.基于PLC的工业机械手控制系统[J].仪表技术与传感器, 2007(09)
[3]王善刚,许海斌.PLC在机械手中的应用[J].长春工程学院学报(自然科学版),2008(03)
猜你喜欢
中国计算机报(2020年11期)2020-04-21
佛山陶瓷(2017年5期)2017-06-05
中国市场(2016年36期)2016-10-19
科技视界(2016年21期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
中国纤检(2015年22期)2016-01-18