
基于Solidworks的农业信息采集系统设计
2015-10-21 17:46郭志越王伟庄煜张刚卢振孙跃志梁玉亮
森林工程 2015年4期
郭志越 王伟 庄煜 张刚 卢振 孙跃志 梁玉亮

摘要:农田信息采集系统已经成为农业物联网信息化的一个热点研究领域。如何为农业科技研究人员、农田业主提供更为精确的参考数据,如何通过物联网技术,实现不同系统与监测点间的信息共享,为解决这一问题,设计农田信息采集系统。首先对国内外农田信息采集现状进行分析,提出农田信息采集系统的设计方案,应用solidworks三维建模与仿真技术建立系统的虚拟模型,并进行仿真研究。对solidworks虚拟模型进行实物模拟车型的加工、装配和实验,通过对实验结果进行分析、对比,证明农业信息采集系统可以在大棚内进行信息采集,并将信息传送至附近的接收点,解决以往农业大棚信息节点采集繁琐和困难的问题。
关键词:物联网;农田信息;信息采集;轮式机器
中图分类号:S776
文献标识码:A
文章编号:1001-005X(2015)04-0092-06
随着物联网技术在农业中的推广应用,利用小型移动设备作为载体,进行农田信息的采集,亦已成为我国农业信息采集系统研究和发展的必然趋势。目前国内农业系统主要用于耕种、采摘、除草等工作,但农业生产还需要大量的、实时的各种农田信息作为人工调控和管理决策的依据,比如土壤信息、作物生长信息等。针对农业信息采集的特点,设计基于物联网的农田信息采集系统,该系统可搭载用于农田作物信息采集的多种传感器如:土壤pH值、土壤含水量、湿度等传感器,以实时地获取农作物生长环境和生长情况信息,并通过物联网,实现不同系统与监测点间的信息共享,实现农田作物生长环境和生长情况的动态、实时监测及农田信息化管理。系统作为信息采集的平台,移动灵活,可靠性高,机构质量尽可能小。设计的好坏是整个系统性能优劣的重要指标,在农田表面地形复杂、未知的环境中,系统必须具有性能优越、自适应能力强的特点,才能有效完成任务。
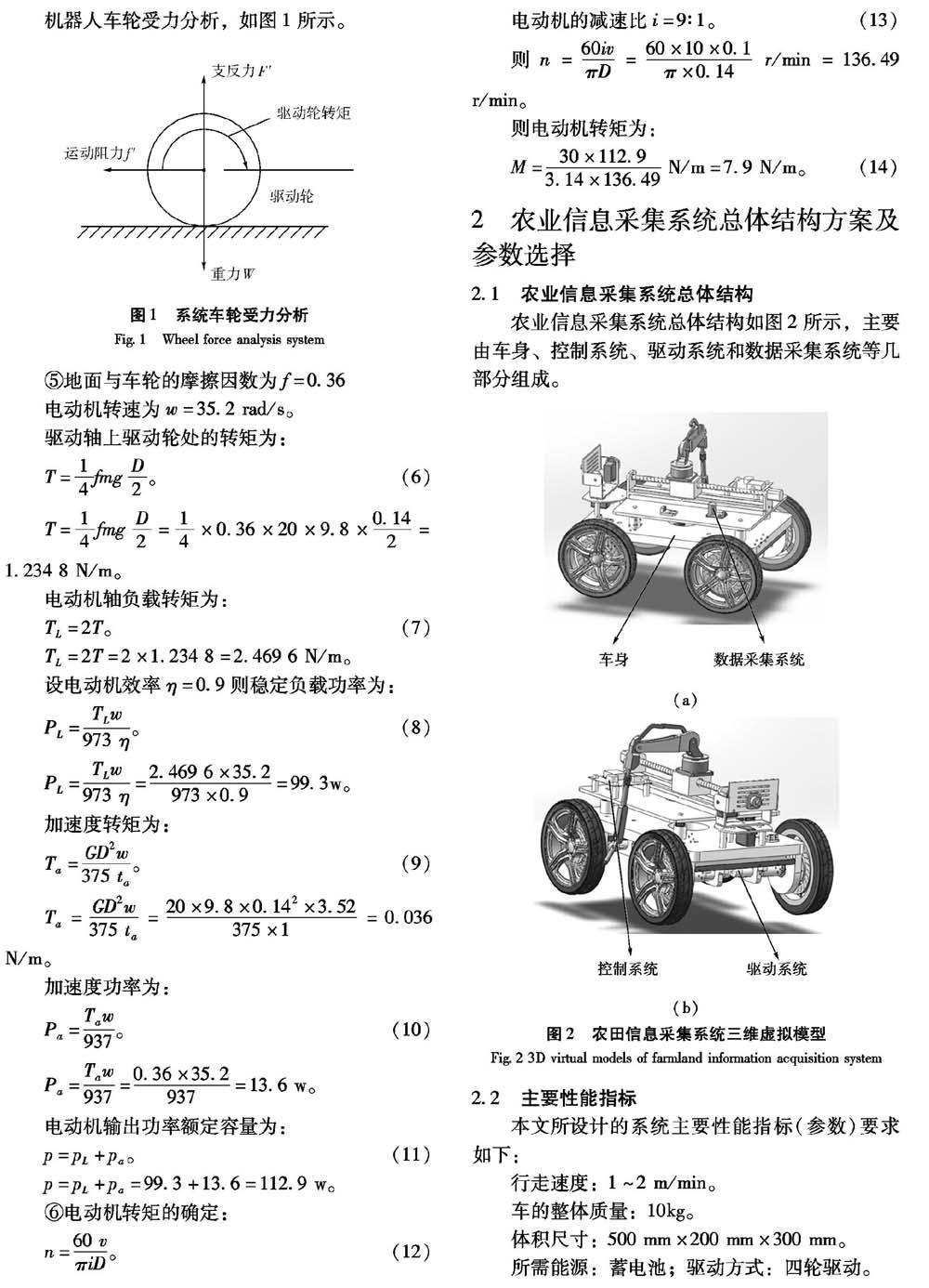
1 系统运动方式与电机的选择
1.1 系统运动方式选择
目前,农田信息采集机器的移动机构主要分为:履带式、腿式和轮式3种,且还有其中的结合形式,如轮一履式等。
(1)履带式。履带最早出现于坦克和装甲车上,后来用于某些地面行走机器人上,履带行走机构由于其接触面积大,附着能力强,能够减少对土壤的碾压,具有良好的地面适应性和良好的稳定性,能够通过配合各种农具,则能在泥泞土地可以进行良好的作业。但履带式机器人转弯半径过大,转向方式不够灵活,且当地面环境恶劣时,履带很快会被磨损而失效,而复杂的履带和数量过多驱动轮使得机器人笨重不堪。而且履带式机器人机械结构设计复杂,且运动学分析及控制设计计算十分困难,而在行走空间受到限制的场合里,难以发挥其履带式的性能。
(2)腿式。腿式的行走机构,无论是对地面的适应性和翻越障碍的能力都是轮式和履带式无法比较的,腿式机器人在平移时,质心会发生很大的变化,如果运动的不协调,就会发生翻倒现象,所以在设计腿式结构机器人时,要根据其结构特点,且设计出一大系列的运动控制算法,且运动学的分析也比较困难,所以在一定程度上对于自主设计具有很大的难度。
(3)轮式。行走机构中最简单,应用最为广泛,也是最常见的机构。通常的行走机构有四轮运动机构,轮式移动机器人具有运动稳定、操纵简单、结构轻巧、移動速度迅速和方向容易控制。而悬架结构和车轮底盘的出现,使得轮式移动机器人能够适应各种崎岖不平的路面,并且能够翻越一定程度的障碍物等。
通过以上3种分析:选用轮式移动结构作为农田信息采集系统的运动方式。
1.2 系统驱动方案选择
农田信息采集系统必须具备驱动装置和转向装置,而电机是比较普遍使用的驱动器。通过电子控制技术对电机实现准确的控制,就能够实现精确运动。驱动装置主要有下面两种方式布置:
(1)集中驱动方式,把驱动电机放置在车体上,在通过传动机构,能够将动力输出到每个轮子上,使车轮运动。
(2)集中控制一分布驱动方式。在每个车轮上都安装电机,驱动车轮运动或转向,电机由安装在车体上的控制系统控制其转动速度,转动或停止。这种结构简单,便于实现,且有利于运动机构的性能的发挥。
农田信息的采集,路面情况都比较差,需承载能力强,需携带各种各样的传感器,甚至需要携带机械手等,能够有效的翻越陡坡等路面情况,故选用集中控制一分布驱动方式,并通过4个电机能够提供更大的力和转矩。
1.3 电机的选择
直流电机虽然不比交流电动机结构简单,制造容易,维护方便,运行可靠。但长时间以来交流电动机的调速问题仍然未能得到较好的解决。所以在此之前,直流电动机具有交流电动机不能比拟的良好的启动调速控制性能。
故计算过程如下。
(1)电动机转矩的确定
机器人重量20kg,对其进行运行阻力和电机功率及转矩的计算。
G=20kgx9.8N/kg。
μ=0.015,d=40mm,D=140mm.
①运行阻力的计算
车轮与轴承之间的摩擦力:
②车轮与地面间的摩擦力:
滚动阻力系数:
滑动摩擦系数:f=0.36,即
③惯性阻力:
④系统总驱动力为:
⑤地面与车轮的摩擦因数为f=0.36
电动机转速为w=35.2rad/s。
驱动轴上驱动轮处的转矩为:
电动机轴负载转矩为:
TL=2T。
(7)
TL=2T=2 x1.2348 =2.4696N/m.
设电动机效率η=0.9则稳定负载功率为:
加速度转矩为:
加速度功率为:
电动机输出功率额定容量为:
⑥电动机转矩的确定:
电动机的减速比i=9:1。
(13)
则电动机转矩为:
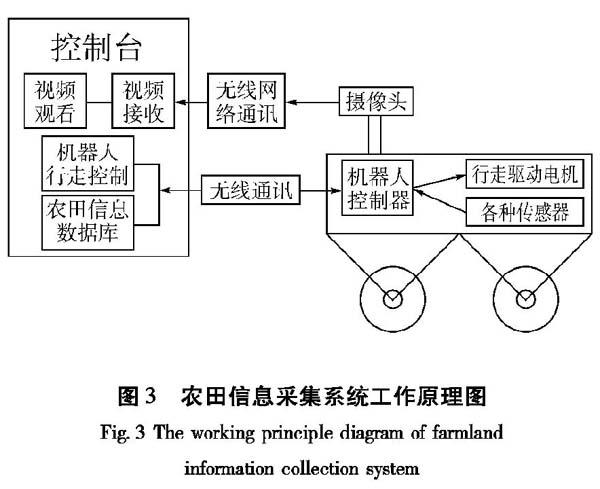
2 农业信息采集系统总体结构方案及参数选择
2.1 农业信息采集系统总体结构
农业信息采集系统总体结构如图2所示,主要由车身、控制系统、驱动系统和数据采集系统等几部分组成。
2.2 主要性能指标
本文所设计的系统主要性能指标(参数)要求如下:
行走速度:1~2m/min。
车的整体质量:lOkg。
体积尺寸:500mm x200mm×300mm。
所需能源:蓄电池;驱动方式:四轮驱动。
2.3 工作原理及基于SolidWorks的虚拟仿真
2.3.1 工作原理
信息采集系统的工作原理:系统在农田通过摄像头和各种传感器进行信息采集,通过无线通讯模块将采集的信息反馈给控制台。控制台根据系统行走情况,进行信息的统计处理和进一步的分析,将有用信息存储到农田信息库,并通过无线通讯发出指令到系统控制器,实现系统的下一步的工作指令。
2.3.2 基于SolidWorks的虚拟仿真
Solidworks的虚拟仿真,尽可能简化机构模型,降低硬件要求,加快系统的运行速度,具體操作过程如下:
(1)建立模型。建立采摘转轴和支撑架简化模型,如图3所示。由转轴和支撑架组成的系统中,刚度相当大,变形小,可以认为是刚体。因此,在由转轴和支撑架组成的系统中,除减震垫等垫圈当做柔性体以外,其余主要部件可以认为是刚体,建立转轴和支撑架的刚性体。
(2)添加载荷。轴、轴承和支撑架之间组成转动副;支撑架与车身为螺栓连接。
(3)运行仿真。经过多次试验仿真结果。
仿真结果:转轴在以10r/min左右的速度旋转时,对与其接触的轴承和车轮的作用力介于0.13~3.26N之间,该作用力介于转轴和支撑架的结合力之间,同时该作用力也远小于转轴的许用应力。因此,理论上转轴满足要求,能够正常工作。支撑架与其接触的轴承和车身的作用力介于0.25~2.5N之间,该作用力介于转轴和支撑架的结合力之间。因此,理论上支撑架满足要求。
3 农业信息采集机器人主要部分设计
3.1 车身结构设计
移动系统车体采用合金铝框架式多层结构,如图2所示。车身一层,主要安装云台、直流电源及CCD摄像头等CCD摄像头安装在云台上,均可在水平面上旋转和上下俯仰,从而提高了系统对环境的探测能力。车身二层,主要安装控制板卡、温度传感器、湿度传感器,根据需要安装其它设备或传感器。车身结构紧凑,易于维护,提高了控制系统的抗干扰能力。云台的设计主要是为了实现车载摄像头在水平方向的旋转运动和轴向的俯仰运动,从而带动安装其上的摄像头可多角度拍摄农作物生长状况。通过机械手可以很方便地将土壤pH值传感器插入到土壤中,完成测量。机械手的前后移动是通过滚珠丝杠来实现的,机械手的手臂部分能实现3个自由度,即在关节处安有3个角度舵机。
3.2 控制系统设计
主控制器部分是整个系统的核心,它主要将从传感器获得环境信息然后进行决策运算与发出控制信号,并进行人机交互等,它承担了系统运动的大量实时计算工作,所以其性能将直接影响系统的实时性能。
本设计采用直插式STC89C52RC芯片作为移动系统小车的控制芯片,它的主要功能是通过控制其输出引脚的电平高低,让电机驱动芯片驱动电机正转或者反转,实现系统的前进、后退、转向以及温度、湿度信息的采集。电机驱动模块集成有6~9V电压转换电路,可以对小车输入6~9V电压,并自带多路SV拓展输出。选择集成性能更强的带电机刹车功能的L293D作为电机驱动芯片,驱动直流电机工作。基于单片机的行走机构控制系统硬件电路如图4所示。由51单片机、电源供电系统、电机驱动模块、红外接收模块等组成。实现了行走机构路径识别,轨迹跟踪等功能。
驱动系统设计思路:采用四轮驱动的方式控制机器人的运动,在四个轮子对应的相应位置安装四个直流减速电机。选用AT89C2051作为从CPU控制电机的转速。该设计系统中采用脉冲宽度调制技术PWM实现对直流电动机的准确与灵活调速。
3.3 数据采集一传感器系统设计
传感系统包括温度、湿度传感器、CCD摄像头、红外避障模块等,选择进口红外探头,该探头具有不怕光的特点,带有可调式电位器,探测距离可调,精度高,有效实现系统避障功能。视频采集CCD摄像头选择HD720P高清摄像头。该摄像头即插即用免驱,支持实地视频拍摄,1280 x720(默认),拍照像素尺寸为1200万像素(软件增强),适应接口为USB3.0,显示帧率为最快60帧/s,成像距离为7CM(支持微距),并内置降噪功能的智能数字麦克风,可完成对智能大棚作物生长情况拍照,录像任务。选择温湿度检测传感器DHT11检测智能大棚温度、湿度。SHTlx单片数字温湿度集成传感器的湿度范围0~100%RH、温度范围-40~128.8℃,测湿精度±4.5%RH、测温精度±0.5℃(25℃)。
3.4 模拟车型的搭建
图5为系统的配置情况。因需保护电机输出轴,避免连接驱动轮带来的负荷直接作用在电机轴上扭矩的有效传递。根据要求设计图示装配结构,如图6所示。该装配结构紧凑,轮轴的受力好,受到冲击不易弯曲。图示的轮子可在市场上购买,且两侧支撑的结构使轮轴的受力良好;支撑处内有轴承,使运动灵活。
操作人员在控制点通过射频接收装置,接收由机器人射频发射装置发送的信息,在信息接收端界面可以显示测得的农作物生长信息,如温度、湿度、pH值等,也可以通过摄像头显示农作物生长情况。试验分两部分:一是先在大棚中实现直行和转弯;二是采集农作物信息并传输到控制点。
3.5 试验结果分析
农业信息采集系统在采集信息的过程中,通过五点法在大棚中选取了十个位置,在不同的时间段进行信息采集,见表1,并通过通信系统发送到接收点。综上所述,针对传统农业大棚信息监测系统的不足,设计并实现了一种基于solidworks的农业大棚信息采集,试验表明农业信息采集系统采集的信息数据精度高,符合农业大棚信息无线监测的要求,具有操作简便、抗干扰能力强等诸多优点,能稳定可靠地监测农业大棚信息。
4 结束语
本文通过对农田信息采集系统的设计和分析,主要完成工作如下:
(1)通过对国内外移动系统行走机构的研究分析,提出了可以满足具有采集农田信息功能的系统的总体设计要求和设计指标要求。
(2)完成了农田信息采集系统行走机构的结构设计,利用solidworks软件对系统结构进行建模,建立了系统结构的虚拟样机模型。
(3)建立了系统的样机,并对其进行了分析,最终试验结果证明,该系统行走机构能够达到所设计的要求和目标。 本课题通过对农业信息采集系统车身、控制系统、驱动系统和数据采集系统等部分设计,利用计算机辅助设计方法,建立了系统虚拟模型,对系统进行优化分析,得到了性能优越的参数组合,据此设计制造了系统物理样机,并进行了行走试验、信息采集试验。使机器人具备了在大棚中自动避障,检测温、湿度等数据和观察作物生长状况的能力。
猜你喜欢
科学家(2016年3期)2016-12-30
中国经贸(2016年19期)2016-12-12
电脑知识与技术(2016年21期)2016-10-18
中国新通信(2016年16期)2016-10-18
科学与财富(2016年28期)2016-10-14
环球时报(2016-08-01)2016-08-01
