
基于机器视觉技术的列车脱轨试验研究
2015-10-17 00:26:45林建辉杜高峰
铁道机车车辆 2015年4期
卢 义,林建辉,张 兵,杜高峰
(1 西南交通大学牵引动力国家重点实验室,四川成都610031;2 西南交通大学机械工程学院,四川成都610031)
基于机器视觉技术的列车脱轨试验研究
卢 义1,林建辉1,张 兵1,杜高峰2
(1 西南交通大学牵引动力国家重点实验室,四川成都610031;2 西南交通大学机械工程学院,四川成都610031)
提出一种基于机器视觉技术的列车脱轨运动检测方法。该方法采用高速摄像机记录脱轨防护器以及脱轨轮对运动情况,利用摄像机标定技术建立图像平面与三维空间的对应关系,完成对列车运动轨迹以及纵向运动参数的测量。该测量方法解决了破坏性试验中测试系统安装的难点,突破传统测试方法,所需设备较少,试验现场适应性强。
机器视觉;列车脱轨试验;相机标定;图像处理;运动分析
近年来,列车脱轨事故频有发生,对铁路运输造成极大的危害。脱轨机理与脱轨防护一度成为各国轨道交通领域的重大研究课题[1]。随着我国高速客运专线的不断开通,列车运行安全性研究变得更加重要。针对国内近年重大脱轨事故,本文研究提出了脱轨安全防护装置,并利用脱轨机构提供稳态爬轨脱轨,阐述了利用机器视觉技术检测脱轨防护器运动轨迹,为脱轨仿真提供一定的理论基础。
在破坏性试验中,测试设备的安装与数据的采集是试验的重点和难点。利用机器视觉技术完成运动目标检测跟踪测量,成为了整个脱轨试验运动测量最行之有效的方法。针对拍摄的高速脱轨视频需要进行如下几个部分的处理:(1)视频图像的预处理,主要包括图像的灰度化以及滤波,通过以上步骤消除视频中的干扰成分;(2)运动目标的检测与跟踪,选择背景差法进行目标检测,利用Kalman算法对物体进行跟踪[2];(3)运动参数的测量,利用相机标定技术建立图像平面与实际场地的对应关系,从而求解运动目标的空间位置信息,完成运动轨迹与纵向运动参数的测量。
1 脱轨试验过程与机构
如图1所示,整个试验由机车自区段①推动被试车辆以5 km/h的速度行至第一直线段,在区段②约40 m范围内将车速提高至试验速度后机车制动,解开车钩使之与被试车辆脱离。机车在区段③约70 m内停车,被试车辆脱离后惰行至区段④无砟轨道区,进入18 m后在脱轨器作用下向右侧脱轨。预留52 m作为脱轨后的车辆运行停车区。脱轨试验按照3个速度级进行,分别为(15~20)km/h,(20~25)km/h和(25~35)km/h。

图1 试验线路图
为使单辆拖车在CRTSⅠ型板式无砟轨道指定位置进行低速脱轨,试验设计了如图2所示的固定式脱轨器。

图2 脱轨器机构示意图
试验为了验证低速脱轨后脱轨安全防护装置防倾翻性能及运动形态,设计了如图3所示L型防脱机构,该装置安装于脱轨轴箱底部。

图3 列车脱轨防护机构示意图
2 图像检测系统
脱轨列车运动轨迹检测的图像测试系统是由奥林巴斯高i-SPEED TR高速摄像机(最高帧率10 000 fs,镜头焦距50 mm,光圈范围f/1.4~f/22)和工业计算机组成,如图4所示。

图4 图像检测系统
高速图像采集是该检测系统的基础部分[3]。该测试系统需要缩短传感器曝光时间,以便减少每帧的运动模糊和冻结运动,为了得到满足后期分析处理要求的图像,需要进行人工辅助灯光补偿,传统解决方法是对目标景物使用大功率的聚光灯,但是只提供高瓦数的聚光灯并不能解决大多数问题,通常还需要聚焦和定位光线,光线的聚集远比光线的数量更重要,所以常规探照灯在HSV任务中并不实用。该系统采用Olympus工业光源和液芯光导管,其具有光线集中、发光效率高、支持相机误触发保护功能、耗电少、寿命长等优点。系统补光灯置于脱轨区间与摄像机之间,脱轨器左右侧各一个光源。镜头的选择同样会对所获得的视频图像产生明显不同的效果。由于爬轨侧观察区域较大,因此选择短焦镜头,脱轨防护侧观察区域较远,选择长焦镜头。
3 图像预处理
由于对脱轨区间进行了人工辅助灯光补偿,灯光分布不均,存在部分的低频噪声干扰[4]。因此,在进行图像处理之前,首先需要对原始图像进行预处理,包括图像的灰度化以及滤波,灰度化处理结果如图5所示。目前常见的滤波方法主要包括高斯滤波、均值滤波、中值滤波和双边滤波,本文主要采用双边滤波算法[5]。由于双边滤波在进行灰度值计算时不仅要考虑其领域范围内的灰度还需要注意他们与中心点之间的距离,因此滤波后点的灰度值表达公式为:

其中k为归一化系数,其表达式为:

式中h为滤波后灰度;x为滤波前灰度;c为空间相似度;s为灰度相似度。
在实际处理过程当中,利用高斯函数即可实现c和s函数,其定义如下:

通过分析得知双边滤波不仅具有较好的图像边界信息保存能力,而且还可以较好的过滤图片中的低频成分,滤波后效果如图6所示。
图5 灰度化图像

图6 双边滤波图像
4 脱轨运动测量
运动目标检测与跟踪是脱轨试验过程当中最基本也是最核心部分,在进行高速视频分析时,通过相应的算法完成对脱轨防护器及一位轮对在视频图像中的检测分割,实现运动目标的跟踪监测,利用相机标定技术实现图像与实际物体的坐标转换,在坐标系中确定物体的空间信息,最终分析确定其运动情况。
运动目标的检测是运动目标跟踪定位的基础,主要任务是从图像中分割提取运动目标,目前比较主流的分析方法包括:背景差法、帧差法、光流法等[6]。
在脱轨试验过程中,摄像机处于静止状态,图像序列背景变化较小,因此采用背景差法检测运动目标。背景差法的关键点是如何获取背景图像,进行背景建模,并能保持对其进行实时更新,获取精确的背景图像。背景差法可用如下公式(2)表示:

其中Fi(x,y)为第i帧时的前景图像;Pi(x,y)为帧图像;Bi(x,y)为背景图像。在获取Bi(x,y)背景图像时,由于存在部分背景变化,且整个脱轨过程在室外进行,光照和天气的变化会对背景模型产生一定的干扰,而单高斯模型法会对图像中每个像素进行计算,然后使用在线估计法来进行背景模型的更新,能够有效的降低因光照和天气变化引起的干扰,因此可以利用单高斯模型法进行背景提取。首先应计算图像中t时刻每点像素Xt的高斯分布参数均值ut和方差∑t,则Xt的概率密度分布为η(Xt,ut,∑t)。当每个像素点的概率大于自适应阈值T时,即可将该像素点当做背景中的像素。针对每个像素都进行上述高斯统计,生成背景图像。利用该算法便可有效提取视频图像中的运动目标[7]。
在完成运动目标提取工作之后需要实现目标物体的运动跟踪。对于脱轨车辆而言,整个脱轨过程均是非线性的,但是高速摄像机拍摄的图像之间的时间间隔非常短暂(2 000 fs),在这个过程中车辆的运动状态不会发生突然性变化,因此可以认为脱轨车辆一直处于匀速运动状态。针对该特点,在跟踪算法方面本文采用了Kalman滤波。它是运动跟踪中一种有效的最小方差估计方法。其基本思想是基于信号和噪声的状态空间模型利用前一时刻的估计值和当前时刻的观测值来更新状态变量,其中状态变量用以表征各特征点的位置、速度等状态信息[8]。在进行运动状态变量估计时,运动目标的状态方程为:

运动目标的观测方程为:

式中A为状态转移矩阵;w(k)为系统噪声;H为状态转移矩阵;r(k)为观测噪声。观测方程有效的反映了理想跟踪结果与实际跟踪结果之间的相互关系,Kalman滤波不仅可以实现对物体运动轨迹滤波跟踪,还可以通过平滑波动数据消除测量位置产生的数据抖动。它有效的完成了对脱轨防护机构及脱轨轮对的外部轮廓及对称中心位置点的跟踪[9]。
最后物体的定位和轨迹测量实施过程主要包括:(1)确定运动目标物体在每帧图像中的二维像素坐标值;(2)将目标物体的二维像素坐标值转换为物体在试验场地中的三维空间值。通过以上2步便可以确定单帧图像中的运动目标在脱轨试验场景中的空间位置信息,最后将每帧图像中运动物体的位置连接起来便能够得到实际的运动轨迹。与此同时,摄像机的拍摄帧率已知,即可知两帧图像之间的时间间隔,因此目标物体的运动速度可以比较容易的计算出来。
5 脱轨试验与结果分析
5.1高速摄像机标定
利用C++及OpenCV相机标定函数对高速摄像机的内部参数及外部参数进行标定[10]。其中内部参数表示摄像机坐标系和世界坐标系之间的关系,外参数表示摄像机在世界坐标系里的位置和方向。摄像机标定坐标系有,世界坐标系P(Xw,Yw,Zw);摄像机坐标系Pu(Xu,Yu,Zu);图像坐标系:[u,v],[x,y]。摄像机模型三坐标的系统关系如图7所示,其中θ是摄像机坐标光轴与像平面夹角,f为相机焦距。
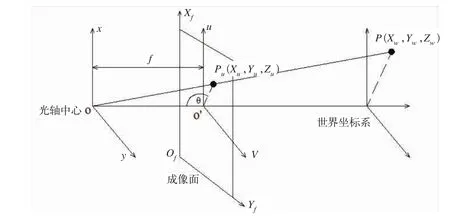
图7 相机模型三坐标关系
利用摄像机坐标系与像平面坐标系变换矩阵完成内部参数标定如下:
焦距:f=[1 014.218;1 018.913]
图像中心坐标点:c=[510.557;501.792]
世界坐标系和摄像机坐标系的相互转换主要是通过旋转矩阵R和平移矩阵T完成,其具体关系如图8所示。
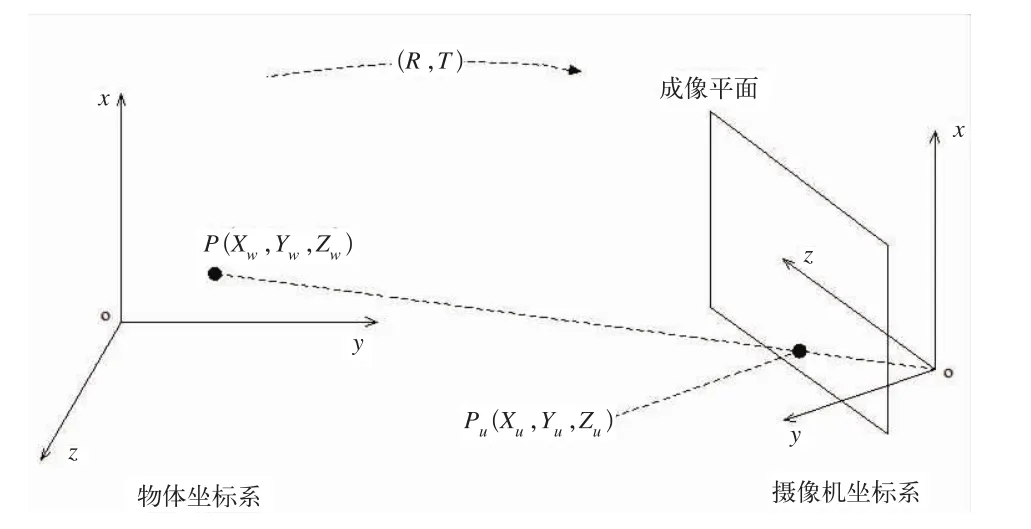
图8 坐标系关系图
物体坐标系与摄像机坐标系的转换关系如下:
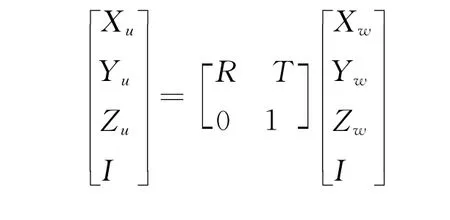
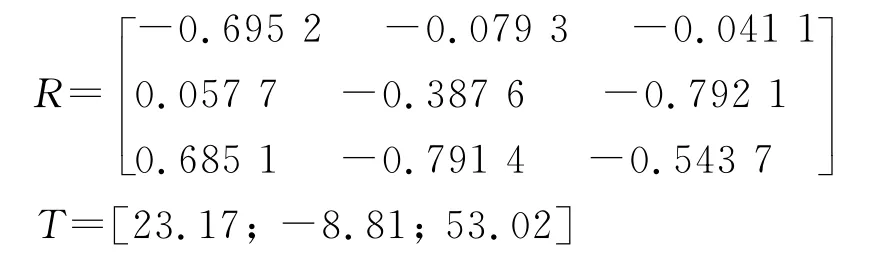
经标定的摄像机外部参数为:
5.2试验结果分析
在低速脱轨试验过程中,高速摄像机采样频率为2000 fs,利用图像处理技术完成了对防脱器运动轨迹的跟踪测量,其运动轨迹如图9所示;

图9 二位侧防脱器运动轨迹
在运动轨迹高度测量中,取轮轨耦合面为基准平面,以脱轨防护器与轴箱安装法兰下表面为轨迹点。通过轨迹曲线可知脱轨防护器在运动过程中并不是线性变化的。在脱轨瞬间,脱轨防护器下表面未与轨面发生正面碰撞,而是与钢轨侧面产生了剧烈的摩擦,出现强烈的火花现象,由此可见在横向脱轨上起到了应有的保护作用,随着横向脱轨距离的稳定,脱轨防护器开始与钢轨上表面发生垂向撞击,并出现弹跳现象,随着能量递减而趋于缓和。该测试方法有效记录了脱轨运动过程。
同时针对一位脱轨轮对,本文求取了不同牵引速度级下其脱轨至落地位移过程中的时程函数如图10所示。

图10 一位轮对脱轨至落地位移时程图
一位轮对脱轨过程中,除了产生纵向的抛物线式运动,还存在横向的脱轨运动,因此其运动轨迹是纵向运动与横向运动的合成,对于不同的牵引及脱轨速度,其时程函数存在一定的差异。
不同工况下,试验列车脱轨纵向参数测量统计如表1所示。

表1 纵向参数
由于摄像机的拍摄帧率已知,图像之间的时间间隔也就成为已知量,在较短的时间间隔内,可以将脱轨瞬间理解为匀速运动,因此车辆的脱轨速度就可以比较容易的计算出来。在制动距离方面,由于运动物体的距离不断增大,通过图像测得的数据与试验结束后实际测量的距离存在一定的误差,其误差均在5%左右,因此对于远距离的拍摄测量,该方法还有待进一步的优化。
6 结束语
提出了利用机器视觉技术研究测量列车脱轨轨迹以及纵向运动参数,试验结果表明该方法能够准确测量脱轨防护器运动轨迹以及脱轨轮对的运动情况,是一种有效的破坏性试验检测方法。在以后的研究工作过程中,为了提高测试系统的可靠性以及测量的更精确性,在保证正常检测的基础上,需要进一步对轨迹跟踪算法进行改进。
[1] 向 俊,曾庆元.列车脱轨机理与脱轨分析理论研究[J].中国铁道科学,2008,29(1):127-129.
[2] 李 明.视频序列中运动目标检测与跟踪算法的研究[D].江苏:苏州大学,2010.
[3] 王华夏.高速铁路隧道衬砌裂缝自动化检测硬件系统研究[J].铁道标准设计,2013,(10):97-102.
[4] 郭 磊,徐友春,李克强,连小珉.基于单目视觉的实时测距方法研究[J].中国图象图形学报,2006,11(1):74-81.
[5] 沈 丰,赵宇明.基于实时Retinex与双边滤波的图像增强算法[J].计算机应用与软件,2009,26(11):234-238,258.
[6] 李 建,蓝金辉,李 杰.一种新型快速运动目标检测算法[J].中南大学学报(自然科学版).2013,(3):978-984.
[7] 张青苗,李 鹏,赵 勇,何宝富,孙彧.一种基于OpenCV实现的运动目标检测算法的研究[J].舰船电子工程,2010,(7):59-61.
[8] 王建锋.基于多信息融合的车辆状态参数估计[J].计算机仿真,2013,(11):131-136.
[9] 罗忠祥,庄越挺,潘云鹤,刘 丰.基于双摄像机的视频特征跟踪算法研究[J].计算机辅助设计与图形学学报. 2002,14(7):646-650.
[10] (美国)布拉德斯基,译者:于仕琪.学习OpenCV[M].北京:清华大学出版社,2009.
Study on Train Derailment Test Based on Computer Vision Technology
LU Yi1,LIN Jianhui1,ZHANG Bing1,DU Gaofeng2
(1 Traction Power State Key Laboratory,South west Jiaotong University,Chengdu 610031 Sichuan,China;2 School of Mechanical Engineering,South west Jiaotong University,Chengdu 610031 Sichuan,China)
A new method is Proposed to measure the train derailment motion,which is based on computer vision technology.The method uses the high-speed cameras to record the movement of derailed protector and derailed wheel,and completes the measurement of the train movement trajectory and the longitudinal motion parameters by using the camera calibration technology,which establishes correspondence between the image plane and the three-dimensional space.This measurement method solves the problem of test system installation difficulty in destructive test,breaking the traditional testing methods.It needs less equipment and has a strong adaptability in test site.
computer vision;train derailment test;camera calibration;image processing;motion analysis
U260.11+2
A doi:10.3969/j.issn.1008-7842.2015.04.14
1008-7842(2015)04-0063-04
�)男,硕士研究生(
2015-01-23)
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中国公共安全(2017年8期)2017-10-13 08:12:17
中等数学(2017年2期)2017-06-01 12:21:50
自动化学报(2017年5期)2017-05-14 06:20:56
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
光学精密工程(2016年1期)2016-11-07 09:01:59
