
CVT行星齿轮系统动力学特性研究
2015-10-13 08:36:50李启海宋永吉葛德
长春理工大学学报(自然科学版) 2015年6期
李启海,宋永吉,葛德
(长春理工大学 机电工程学院,长春 130022)
CVT行星齿轮系统动力学特性研究
李启海,宋永吉,葛德
(长春理工大学机电工程学院,长春130022)
以某型汽车CVT行星齿轮系统为研究对象,基于非线性接触理论及RecurDyn多体动力学软件建立了行星齿轮系统多体动力学模型。针对不同工况下行星齿轮系统可视化研究,分析了行星轮系在啮合过程中动态接触力及变化规律,验证了转速与交变载荷的周期性关系是影响轮齿正确啮合的关键因素。仿真分析表明,对于建立的行星齿轮系统可客观显示出各零部件动态特性,其仿真值与理论值相吻合,该研究成果可为齿轮的振动与冲击进一步分析提供一种切实可行的动力学基础。
行星齿轮系统;多体动力学;仿真分析;动态接触力;
CVT行星齿轮系统作为汽车动力传动系统中一种复杂关键部件,不仅可以实现档位变换、传递动力,而且其结构还具有体积小、质量轻、结构紧凑、承载能力强、传动比大及效率高等优点[1]。因此,行星齿轮系统广泛应用于汽车传动,是在齿轮传动技术的基础上所形成的学科理论。基于多体动力学及非线性接触理论,可以为行星齿轮传动复杂“多元变异”的动态特性提供一种分析理念,从而进一步优化行星齿轮系统,以满足实际应用过程中无级变速技术需求。行星齿轮系统结构复杂,在啮合过程中产生的周期性动态特性,不仅对机械寿命有一定影响,而且还影响机械运动的平稳性和机械工作的精度,因此研究行星齿轮系统的动态特性分析,尤其在实际工作环境中数值仿真分析是十分必要的,对行星齿轮传动系统的真实分析具有重要的指导意义。
1 行星齿轮系统多体动力学模型的建立
本文研究的某型汽车CVT行星齿轮传动系统位于变速器输入轴一端,为单级2K-H型行星轮系,其结构简图及实物样机如图1所示,各啮合齿形均为标准渐开线斜齿圆柱齿轮。中心轮为动力输入的主构件,行星轮由行星架通过滚针轴承连接并均布在内齿轮上,行星架焊接在前进离合器毂上,同时也是倒档离合器内毂,由于行星架对齿轮的作用力影响比较小,因此分析时简化其模型,内齿轮外缘四周八个凸舌与离合器外毂啮合可实现前进档和倒档。表1为各个部件的基本参数。
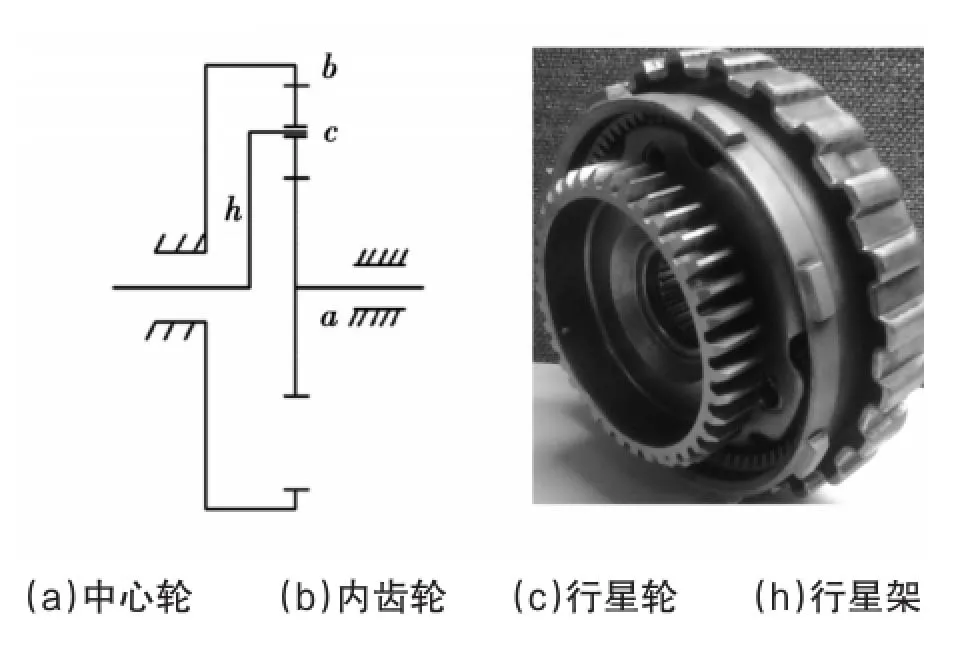
图1 行星齿轮系统结构简图及样机实物
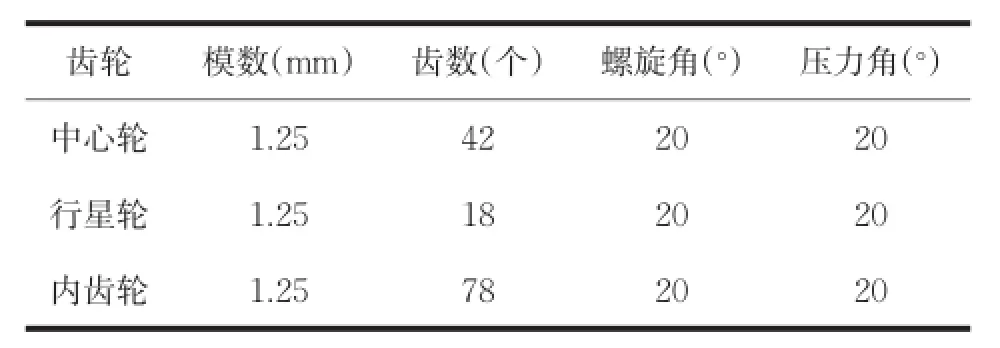
表1 行星齿轮系统各部件基本参数
1.1几何模型建立
在实际模型中考虑到建模精度及兼顾仿真的可靠性,基于Matlab、VBA及CATIA多平台交错环境下建立齿轮渐开线曲线特征方程并通过VBA宏运算将点云数据导入CATIA中精确绘制齿廓曲线,得到标准渐开线斜齿轮参数化模型并对各个零部件进行虚拟装配,在此基础上通过接触碰撞检查和DMU机构运动分析,验证了所建模型的正确性[3]。图2所示为在CATIA中经优化处理后的三维装配体模型。
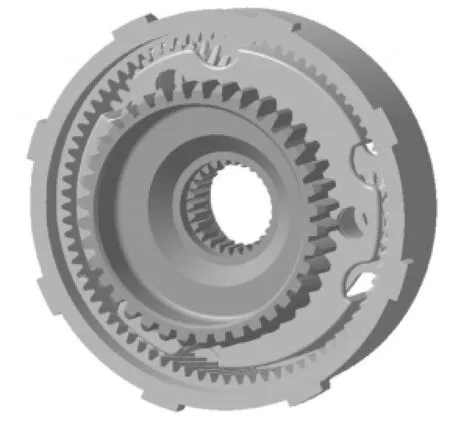
图2 CVT行星齿轮系统三维模型
1.2基于RecurDyn的多体动力学理论
RecurDyn是由韩国FunctionBay公司基于递归算法开发的新一代多体系统动力学仿真软件。它采用相对坐标系运动方程理论和完全递归算法,非常适用于求解大规模及复杂接触的多体系统动力学问题[2]。

图3 两相邻刚体的坐标表示
图3为相邻刚体的运动关系,假定刚体(i-1)为刚体i的前一刚体,点Oi的坐标可表示为:

设A(i-1)=AT(i-1)Ai,那么刚体i的角速度在局部坐标系中可表示为:

式中,H′可由旋转轴确定。对公式(1)求导,结合式(2)可得:
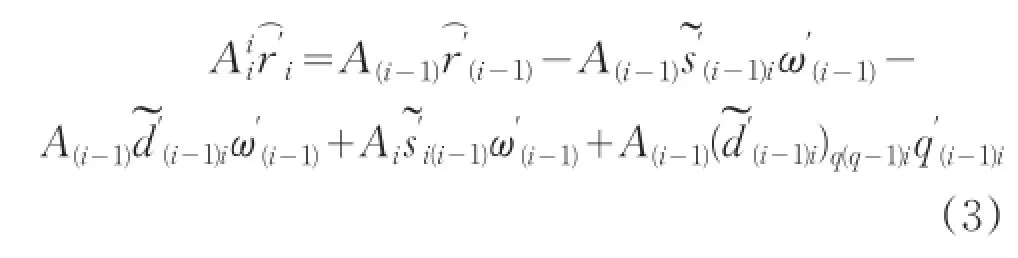
式中,s′(i-1)i、d′(i-1)i、s′i(i-1)表示斜对称矩阵,矩阵元素由矢量叉积中的矢量元素组成,q′(i-1)i为相对坐标矢量。将(2)中的ω′i带入(3)中,并在方程两边同乘ATi可得式(4):

式中,Ȧi=Aiῶ′i。联立(2)、(4)可以得到相邻刚体间的速度递归方程

同理,可得虚位移的递归方程为:

一般情况下,为将直角坐标系中的已知力转化为局部坐标系中的广义力,需要进行坐标变化,将矢量G转化为新的矢量g=BTG,这样就可以求出直角坐标系下Q∈Rmr的虚功

将δZ=Bδq代入(8)得

其中,Q*≡BTQ,将(9)转化为求和形式可得

将式(7)代入(8)得到

其中:

令(10)和(11)的右侧相等,得Q*的递归算法为:

为获取更高的计算效率,BTG可通过下列各式进行计算:

其中g是BTG的计算结果。
1.3边界约束条件
经以上RecurDyn多体动力学理论研究,按照实际运行情况结合CVT行星齿轮传动系统各部件运动学分析,分别确定中心轮与机架、行星架与机架、行星架与行星轮之间的转动副,内齿轮固定,中心轮与行星轮、内齿轮与行星轮之间的高副接触,同时根据CVT某工况下输入轴转速在中心轮上施加旋转激励,行星架上施加负载转矩。完成约束后的多体动力学模型如图4所示。
图4 CVT行星齿轮系统动力学仿真模型
2 行星齿轮系统稳定工况下仿真分析
2.1仿真条件设置
根据Recyrdyn非线性接触力计算公式[4,5]:

式中:k为接触刚度系数,取k=1*106N/mm,c为阻尼系数,取c=10,m1,m2,m3分别为刚度指数、阻尼指数和凹痕指数,使用系统默认值即可,δ为穿透深度取1mm,δ∙为接触点的相对速度,分析中不考虑其影响。为防止启动时施加的转速和负载发生突变,使用STEP函数将其施加于中心轮的Motion上即STEP(time,0,0,0.03,314),如图5所示。行星架的负载转矩Motion为STEP(time,0,0,0.03,52500),仿真时间t=0.3s,如图6所示。

图5 中心轮输入转速曲线
图6 行星架负载转矩曲线
2.2仿真结果分析
行星架的输出转速曲线显示其转速值在109.902范围内呈现小幅度波动,误差很小趋于平稳趋势,并与理论计算得到的理论值109.905非常接近[6,7]。行星轮1、2、3的转速曲线显示其转速值也在小范围内连续波动的趋势。表2给出了行星齿轮系统转速理论值与仿真值,可以发现通过准确的建模得到的虚拟样机仿真可靠性较高。
表2 行星齿轮系统理论转速理论值与仿真值比较
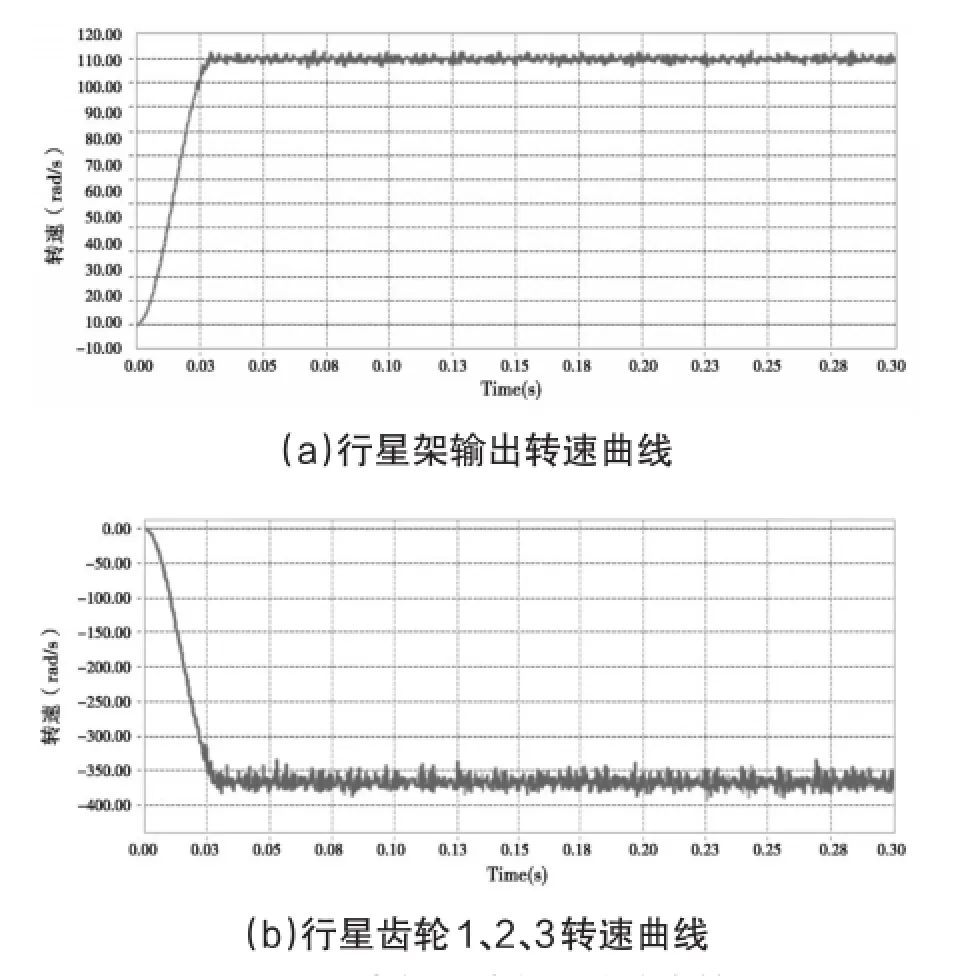
图7 行星齿轮系统各构件输出转速
图7(a)所示为contact1行星轮1与中心轮x向接触力,从接触力曲线可以看出,行星齿轮1圆周力Fx成正余弦函数波动,具有明显的周期性且幅值基本相当,其波动幅度在0~1708.574之间,峰值均值与理论值1789.901较接近。行星齿轮圆周力的周期性正余弦变化趋势正是齿轮啮合的具体体现。
图7(b)所示为行星齿轮1与太阳轮z向接触力,其峰值在0~612.089之间变化,与理论值693.148比较接近。图8(c)为行星轮1与太阳轮接触合力,其峰值在0~1934.965范围内变化。表3给出了行星轮1与中心轮接触力理论值与仿真值及误差。
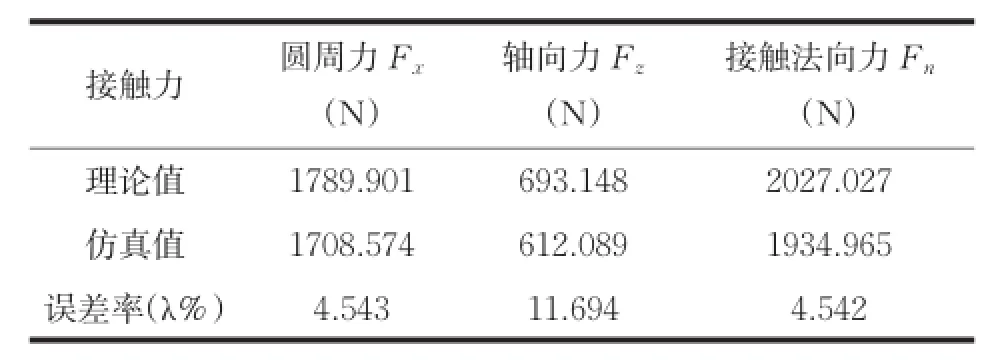
表3 行星轮1与中心轮接触力理论值与仿真值比较
3 行星齿轮系统不同工况下仿真分析
3.1仿真条件设置
为对不同工况下行星齿轮系统的动态特性研究,分别选取了某用户应用该车型在不同工况下的转速,经理论换算得到了输入轴端中心轮转速,以该转速作为仿真模拟边界条件并应用STEP函数建立了实际工况下转速,将其施加于行星轮系中的中心轮Motion上,以满足在不同行驶速度下的要求。图9和图10分别为中心轮和行星架在不同工况下转速曲线。
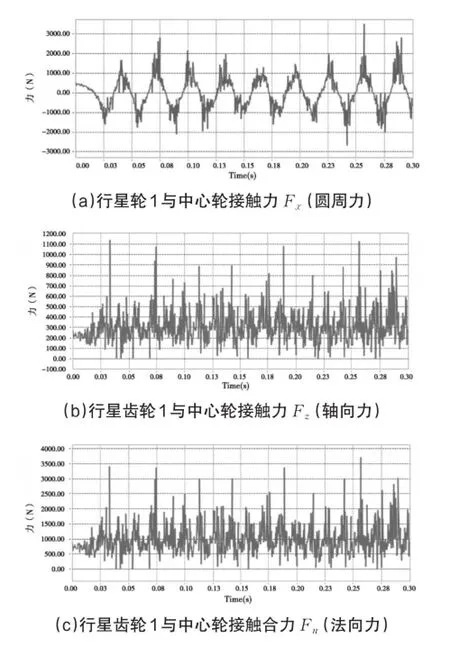
图8 行星齿轮1与中心轮动态啮合接触力曲线
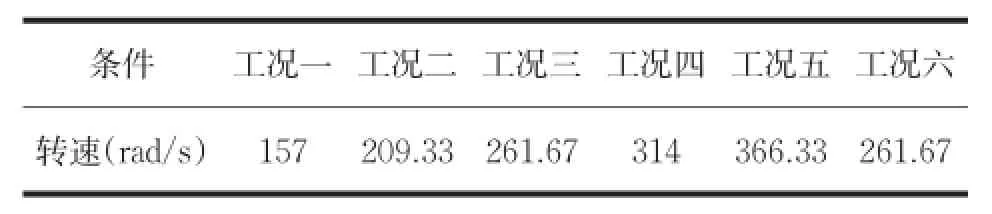
表4 不同工况下中心轮转速
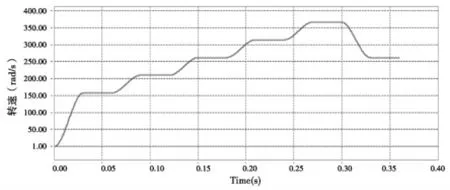
图9 中心轮转速曲线
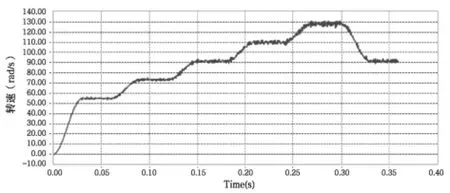
图10 行星架转速曲线
3.2仿真结果分析
图11为行星轮1的转速曲线,图12为行星轮1与中心轮的啮合力曲线。从以上曲线图可以看出,行星轮1速度变化随着转速的加快其曲线较有明显的波动,其与中心轮的啮合力曲线显示啮合力峰值也在突变,有逐渐增大的趋势。随着转速的平稳,啮合力密度值也维持在一定范围内波动,这说明在实际工况中不同转速频繁周期性变化会对行星齿轮系统带来不同程度的交变载荷冲击,使得行星轮系局部应力瞬时增大。
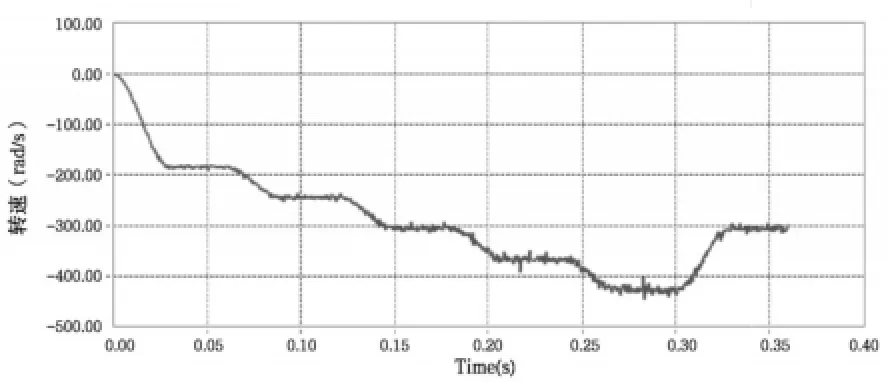
图11 行星轮1转速曲线
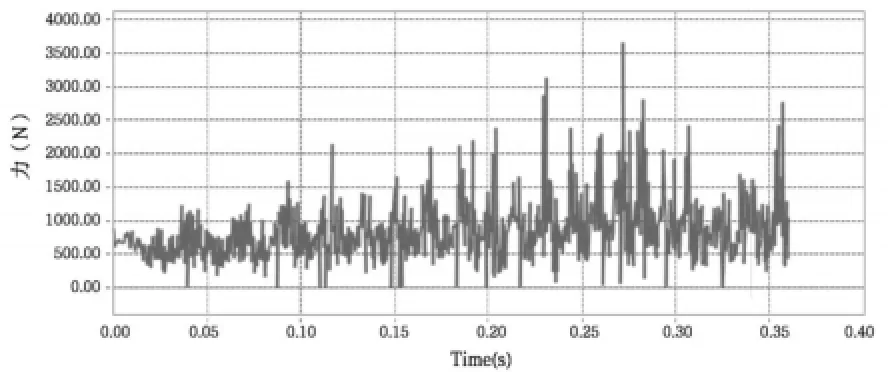
图12 行星轮1与中心轮啮合接触力曲线
分析以上结果可知,行星齿轮系统轮在整个工作周期中,正余弦交变载荷重复出现是影响轮齿正确啮合的关键因素,使得行星齿轮系统产生振动与噪声,从而加剧了整个传动系统的失效。
4 结论
建立了某型汽车CVT行星齿轮系统多体动力学模型,应用非线性接触动力学理论仿真试验了在实际工况下行星齿轮系统的动态特性,此模型真实的展示出了行星轮系各零部件可视化动态参数,为强度、疲劳分析设计提供了科学依据。较以往行星齿轮系统动态特性研究,文章基于某用户应用该车型在不同工况下对该系统建立的多边界约束条件进行动态特性分析,其仿真结果客观的显示了复杂工况下动力性能,仿真分析结果与理论值相接近,从而为CVT开发设计提供强有力的理论支撑。通过所建立的行星齿轮系统动力学模型仿真分析,得到了行星齿轮动态接触力呈现明显的周期性关系,其峰值随转速加快出现不同程度的波动最后趋于平稳,这为齿轮的振动与冲击研究提供了动力学基础。
[1] 饶振纲.行星传动机构设计[M].北京:化学工业出版社,2003.
[2] 焦晓娟,张湝渭,彭斌彬.RecyrDyn多体系统优化仿真技术[M].北京:清华大学出版社,2010.
[3] 鲁君尚,张安鹏,王书满.CATIA V5之装配设计与实时渲染[M].北京:北京航空航天大学出版,2007.
[4] 刘义主.RecyrDyn多体动力学仿真基础应用与提高[M].北京:电子工业出版社,2013.
[5] 龙凯,程颖.齿轮啮合力仿真计算的参数选取研究[J].计算机仿真,2002,19(6):87-91.
[6] 秦荣荣,崔可为.机械原理[M].北京:高等教育出版社,2004.
[7] 齿轮手册编委会.齿轮手册[M].北京:机械工业出版社,1992.
Research on Dynamic Characteristics of CVT Planetary Gear System
LI Qihai,SONG Yongji,GE De
(School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022)
Aimed at the CVT planetary gear system applied to the certain type of automobile,the dynamic simulation model of planetary gear system was established based on non-linear contact theory and multi-body dynamics software RecurDyn.Visuable consequences in different working conditions of the planetary gear system were studied and dynamic contact forces and regulate laws of the planetary gear system were analysed during the meshing process,as well,the periodicity relationship between rotate velocity and alternating loads were researched,the results show it is a key factor which affects the correct tooth contact.The simulation suggests that the dynamic characteristics of the various components can be shown objectively for the planetary gear system established,the figures match with calculated data,The research results will provides a practical basis kinetic for further study of gear vibration and shock analysis.
planetary gear system;multi-body dynamics;simulation analysis;dynamic contact forces
TH132
A
1672-9870(2015)06-0059-05
2015-09-09
李启海(1965-),男,博士,副教授,E-mail:liqihai@cust.edu.cn
猜你喜欢
内燃机工程(2021年6期)2021-12-10 08:07:46
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
教育与职业(下)(2019年7期)2019-08-15 02:19:07
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
读者(2018年20期)2018-09-27 02:44:48
中国管理信息化(2018年7期)2018-05-27 08:33:48
制造技术与机床(2017年3期)2017-06-23 08:11:52
山东工业技术(2016年7期)2016-04-08 23:48:42
