
载波频率号提取算法对箭载GLONASS速度计算的影响*
2015-10-09 08:55:50饶爱水王振平
电讯技术 2015年2期
饶爱水,张 龙,王振平,汪 毅
(中国卫星海上测控部,江苏 江阴214431)
1 引言
GLONASS卫星采用频分多址的扩频信号,每颗卫星采用不同的载波频率而使用相同的测距码[1],导航信号在不同的频率上播发使得接收机的设计更为复杂,也带来GLONASS测速的新特点。国内外关于导航系统测速的研究主要针对GPS测速,GLONASS测速以及“北斗”测速的相关文献较少。文献[2]研究了利用GPS单点测速技术测量海浪的运动速度,文献[3]研究了利用差分测速和Kalman滤波估计相位变率方法解算飞机飞行速度,文献[4]研究了利用自适应滤波方法减少影响GPS测速误差的方法,文献[5]分析了利用载波相位变率实时GPS测速的误差来源及其对测速的影响,文献[6]分析了多路径效应对实时动态精密单点定位的影响,文献[7]分析了多普勒对GPS测速的影响,文献[8]利用“北斗”实测多普勒观测量对其测速精度进行了初步探讨,文献[9]研究了箭载GLONASS单点定位的速度精度。本文研究GLONASS测速时载波频率号对高速运动目标测速的影响。
2 载波频率号参数介绍
GLONASS导航电文由一个超帧组成,每个超帧由5个帧组成,每个帧由15个串组成,含有24颗GLONASS卫星历书的全部内容,如图1所示。每个帧传送内容为GLONASS卫星的部分实时数据和给定的全部非实时数据。在帧结构上,第1~4帧相同,第5帧含有2个保留串。
L1载波和L2载波频率标称值(单位MHz)由如下表达式确定:

对于任何特定的GLONASS卫星,频道号K通过历书中的载波频率号HAn计算得到,2005年以后发射的GLONASS卫星的K取值为[-7,+6]。根据导航卫星测速原理,当接收机测得卫星信号多普勒频移fd后,可计算得出伪距变化率ρk为

式中,c为光速,fk为卫星的载波频率。联合公式(1)和公式(2),可知频道号K的计算结果对GLONASS测速结果具有重要影响。
频道号K与历书参数载波频率号HAn之间的关系如公式(3)所示:


图1 GLONASS导航电文结构Fig.1 Navigation message structure of GLONASS
3 载波频率号算法设计及结果
根据GLONASS ICD文件规定,实时数据P3标识本帧内传送卫星历书的卫星数标志,“1”标识5颗卫星,“0”表示4颗卫星,P3位于每帧电文第3串的第80位,据此可以得出计算载波频率号的处理算法,本文称全帧积累算法,如图2所示。当电文串号m为7、9、11、13时,需要首先判断(m-1)串是否积累完毕,从中计算卫星号nA(位于第77~73位),然后再从 m串中计算得到值,形成(nA、)配对表;当电文串号m为15时,首先要获取第3串中的P3值,为此需要积累本帧全部15串的数据,当P3值为1时再计算(nA、)的值。
保留串的存在,导致通过P3计算载波频率号的方法耗时较长,原因是需要积累一个完整的电文帧(共15串)才能确保P3值与第14、15串的值相匹配,至少需要积累30 s。该算法能获得正确的(nA、)配对表值,如表1所示。

图2 通过卫星数判断载波频率号Fig.2 Calculating carrier frequency number by satellite number

表1 卫星号与载波频率号配对表Table1 Counterpart table of satellite number and carrier frequency number
为了快速获得(卫星号、载波频率号)配对表,一种退化的算法是直接计算载波频率号,把第5帧的第14、15串数据当做正常数据处理,其算法流程如图3(a)所示,显然这种算法获得的载波频率号存在错误值;另一种保守的算法是丢弃第14、15串的数据(包括前4帧),只处理第6~13串中的数据,其算法流程如图3(b)所示,根据GLONASS ICD文件说明,GLONASS历书在超帧内的排列如表2所示,这种方法将无法获取第5、10、15、20号卫星的载波频率号。

图3 错误的载波频率号计算算法Fig.3 Inaccurate calculation algorithm of carrier frequency number

表2 GONASS历书在超帧内的排列Table2 Arrangement of GLONASS almanac within superframe
通过观测保留的第14、15串的定义以及实际测量数据的分析,发现第15串的低数据位都为0,而非保留串的第15串的低数据位不为0,因此可以通过第15串的低位数据是否为0判断保留串,算法如图4所示。该算法与图2的算法类似,但由于无需积累完整一帧数据而具有较快的速度。
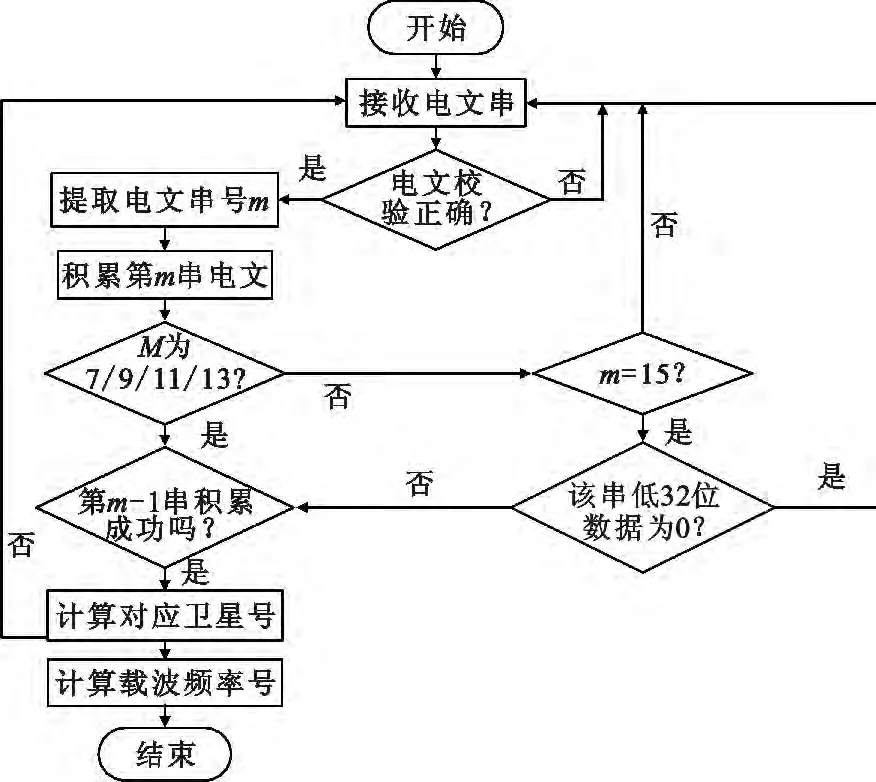
图4 通过保留位判断载波频率号Fig.4 Calculating carrier frequency number by reserve bits
通过复演某次火箭飞行任务数据,得出图2和图4两种算法计算载波频道号的时间曲线图,如图5所示。从图中可看出通过保留位判断载波频率号的算法可提前38 s计算出数据,对于短弧段实时测控任务,尽量缩短首次定位时间非常重要。

图5 两种载波频率号计算算法时间比较Fig.5 Time comparison between two carrier frequency number algorithms
4 载波频率号对速度精度的影响分析
4.1 速度误差理论分析
为考察载波频率号计算对速度精度的影响,公式(2)对fk进行微分,得到

对于L1载波,fk近似取值为1602 MHz,dfk近似取值为(0.5625~0.5625×13)MHz, ρk近似为目标运行的速度V,可以估算得出

公式(5)即为载波频率号计算错误引起的速度误差值,对速度达几千米每秒的高速飞行器,最大可引起几十米每秒的误差,远超出试验任务要求的精度误差范围。
4.2 速度精度计算方法
采用伪距单点定位的最小二乘法,根据定位原理,有速度方程

式中,V为速度测量噪声向量,矩阵A为方向余弦矩阵,X为速度和钟差变化率向量,L为速度观测向量。根据最小二乘法的内符合精度估计公式,下面估算定位结果的精度[6]。
(1)伪距观测值的均方根差

式中,[vv]为残差V的平方和,n为观察到的卫星个数。
(2)未知数X的权逆矩阵Qxx
可得定位精度σP为

根据公式(9),在定位计算时可一并获取到对应的速度精度。
4.3 实际计算结果
为估计载波频率号计算错误对速度精度的影响,在GNSS弹道计算软件中实现直接解算载波频率号算法(图3(a)算法),通过复演某次火箭飞行试验数据,采用公式(9)估计GLONASS弹道精度,得到弹道精度曲线如图6所示。从图中可以看出引起的弹道精度误差在15~50 m/s之间,且精度误差随火箭运行速度增大而变大。分析该算法获取的8号卫星载波频率号有两个值,即6和0,0为获取到的错误值;该弧段内,火箭的飞行速度为7400~9400 m/s,根据公式(4),dfk取值为(0.5625 ×6)MHz,可估算出由于载波频率号导致的速度精度误差最小值为15.6 m/s;根据公式(5),可估算出速度精度误差最大值为42.9 m/s,理论分析与实际计算结果数据比较吻合。

图6 错误算法获取的GLONASS弹道速度精度曲线Fig.6 Curve of velocity precision of GLONASS trajectory calculated by inaccurate algorithm
采用图4通过保留位判断载波频率号的算法,估计该任务弧段GLONASS弹道精度,结果如图7所示。从图中可知,GLONASS弹道精度绝大部分在0.1 m/s以下,最大值在0.25 m/s左右,能够满足火箭飞行试验任务对速度精度计算的要求。

图7 正确算法获取的GLONASS弹道速度精度Fig.7 Curve of velocity precision of GLONASS trajectory calculated by accurate algorithm
5 结束语
随着导航系统的发展,GPS、GLONASS、“北斗”等导航系统用于测速服务的应用越来越普遍,不同导航系统对目标测速的影响因素多有不同。本文针对GLONASS测速问题,分析了载波频率号计算对测速的影响;在给出的4种载波频率号提取算法中,直接计算载波频率号算法获得错误的频率号,导致速度精度跳变,引起速度精度误差为目标飞行速度的1/2850~1/220;丢弃保留串算法无法获取第5、10、15、20号卫星的载波频率号,引起速度精度误差与直接计算载波频率号算法相同;通过卫星数判断载波频率号算法需要积累完整的电文帧,首次测速时间延长;而通过保留位判断载波频率号算法具有最小首次测速时间,缩短30 s以上。因此,通过保留位判断载波频率号算法具有最优的性能。
[1]刘基余.GLONASS现代化的启迪[J]﹒遥测遥控,2010,31(5):2 -6.LIU Jiyu.Some Enlightenment from GLONASS Modernization[J].Journal of Telemetry,Tracking and Command,2010,31(5):2 -6.(in Chinese)
[2]SHAN Rui,LIU Yanxiong,ZHAO Tiehu,et al.Research of the wave measurement using GPS absolute velocity estimation technology[J].Marine Science Bulletin,2013,15(2):59-70.
[3]田良辉,刘根友,郭爱智.Kalman滤波估计GPS载波相位变率的测速方法与实现[J].大地测量与地球动力学,2011,31(1):72 -77.TIAN Lianghui,LIU Genyou,GUO Aizhi.Method of Velocitymeasurement By GPS Carrier Phaserate Estimated From Kalman Filter and Its Implement[J].Journal of Geodesy and Geodynamics,2011,31(1):72 - 77.(in Chinese)
[4]仇立成,祝程程.自适应滤波在GPS测速中的应用[J].全球定位系统,2013,38(1):15 -17.QIU Licheng,ZHU Chengcheng.The Application of Adaptive Filter in Velocity Measurement with GPS [J].GNSS World of China,2013,38(1):15 -17.(in Chinese)
[5]郭爱智,王勇,刘根友,等.高频GPS实时单点测速误差分析[J].大地测量与地球动力学,2013,33(5):34 -38.GUO Aizhi,WANG Yong,LIU Genyou,et al.Error Analysis of High-Rate GPS Data Real Time Single-Point Velocity-Determination[J].Journal of Geodesy and Geodynamics,2013,33(5):34 -38.(in Chinese)
[6]万胜辉,杨遵龙,苏䶮.实时动态精密单点定位中的多路径效应削弱方法[J].电讯技术,2013,53(3):312 -317.WAN Shenghui,YANG Zunlong,SU Yan.Mitigation of Multipath Effects in Rear time Kinematic Precise Point Positioning[J].Telecommunication Engineering,2013,53(3):312 -317.(in Chinese)
[7]Zhang J.Short note:On the relativietic Doppler effect for precise velocity determination using GPS[J].Journal of Geodesy,2006,80(2):104 -110.
[8]王拓,吕志伟,殷实.“北斗”多普勒测速精度的分析[J].测绘信息与工程,2012,37(2):16 -19.WANG Tuo,LYU Zhiwei,YIN Shi,et al.Preliminary Accuracy Analysis on Velocity Determination Using COMPASS Doppler Measurements[J].Journal of Geomatics,2012,37(2):16 -19.(in Chinese)
[9]赵树强,许爱华,王家松,等.箭载GLONASS弹道确定及精度分析[J].宇航动力学学报,2012,2(2):27 -31.ZHAO Shuqiang,XU Aihua,WANG Jiasong,et al.Rocket Trajectory Determination and Precision Analysis Using On- Board GLONASS Data Processing[J].Journal of Astrodynamics,2012,2(2):27 -31.(in Chinese)
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09 03:22:48
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
电子制作(2019年7期)2019-04-25 13:17:48
山东工业技术(2016年15期)2016-12-01 05:31:14
制导与引信(2016年3期)2016-03-20 16:02:02
信息记录材料(2016年4期)2016-03-11 15:22:33
西部广播电视(2015年10期)2016-01-18 04:01:45
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
电测与仪表(2014年15期)2014-04-04 12:05:32
