水下双定子永磁无刷电机拓扑结构与绕组设计
2015-09-22 06:36:20胡岩李扬
电气开关 2015年1期
胡岩,李扬
(沈阳工业大学电气工程学院,辽宁 沈阳 110023)
1 引言
随着陆地资源的日益紧张,人类对资源的争夺也日趋激烈,占地球总面积2/3的海洋蕴含着巨大的资源财富,同时也有许多未知领域期待人们的探索。海底矿产资源不仅包括石油、天然气这些我们今天熟知的燃料资源,还包括可燃冰、金属结核、富钴结壳、海底热液硫化物等[1],其潜在的商业价值是巨大的,各国纷纷把海洋资源的研究开发提升到战略高度。同时,对海洋的研究也有助于提升医学、生命科学、地球科学等学科的认知水平。工欲善其事,必先利其器。为了满足海洋研究的需要,各种水下机器人、潜水器的研究开发的竞争也越来越激烈,可以说,潜水器的装备水平直接决定了海洋研究的水平。
水下推进电机作为潜水器和水下机器人的动力系统的主要部分,其性能直接影响潜水器的灵活性和可操控性。交流异步电机主要应用在浅海电缆供电,对潜水器灵活性要求不高但功率水平较高的的场合,永磁直流电机则应用于小功率多台电机的电力传动[2]。
由于水下电机既是水下装置的动力驱动,又是负载的一部分,因此如何提高功率密度成为水下推进电机设计的重要任务。稀土永磁电机由于效率高、体积小、性能优良等特点,得到了越来越广泛的应用。稀土永磁无刷直流电机由于功率密度高,结构简单,适合充油式平衡压力的结构,是现今深海推进电机的研究热点[3],现有的水下推进器的产品中,永磁无刷电机已经基本取代异步机和直流电机。与普通单定子结构电机相比,同体积的双定子发电机能够输出更大功率,并具有较好的动态响应性能[4],近年来在风力发电[5]、电动汽车驱动电机[6,7]领域有着广泛研究。
本文研究的同心式双定子电机相比较普通结构电机,内部多了一个同轴安装的定子,两个定子中间安放杯形转子,这样就形成了双气隙结构。由于杯形转子结构重量较轻,内外定子绕组形成的电枢磁动势共同作用,因此具有惯量小,转矩大的特点。双定子电机的实际意义在于内定子分担的电机功率大小,如果内定子分担的电机功率所占电机整体输出功率较小,就失去了双定子电机的意义,因此以往双定子电机的研究主要集中在大功率风力发电机,汽车轮毂驱动电机,以及位置伺服电机领域,这些电机长径比较小,外定子内部有较大的空间可以利用。水下驱动电机转速较高,长径比较大,本身内部空间较小,如何增加内部功率配额是研究的关键。本文采用内外定子槽数不等的结构,研究了内外定子绕组结构和用有限元仿真的方法研究了内外定子绕组轴中线的位置。
2 双定子永磁电机磁路结构与数学模型
双定子电机结构如图1所示,电机从外到内依次是外定子、杯形转子、内定子。

图1 双定子BLDC电机结构示意图
串联磁路双定子永磁无刷直流电机磁通路径如图2所示。

图2 双定子BLDC电机磁路示意图
为了便于说明,对磁路作如下假设:
(1)忽略磁饱和的影响,认为磁路是线性的。
(2)不计磁滞和涡流效应。
(3)不计极间漏磁和端部效应。
得到图3串联磁路双定子永磁无刷电机的磁路模型。

图3 串联磁路空载等效图
根据磁网络的基尔霍夫定律可列出方程

空载漏磁系数

R=Rt1+Ry1+Rg1+Rt2+Ry2+Rg2,其中 Rt、Ry、Rg分别为定子齿部磁阻、轭部磁阻、气隙磁阻,Rσ为等效漏磁阻,R0为永磁体内磁阻。
3 双定子电机设计的关键问题
水下双定子永磁无刷直流电机在设计过程中除了要考虑普通无刷直流电机的设计问题外,还要将其工作环境、工作方式等要素纳入到设计考虑中,主要包括以下几个方面的问题。
3.1 内外定子功率分配
电机内外定子功率分别为P1、P2,总功率为P0=P1+P2P0。在方波驱动的永磁无刷直流电机中,相反电势公式可以表示为

式中,Nph为绕组每相串联匝数,φδ为每极磁通,n为电机转速,a'p为计算极弧系数。根据电机功率方程P=monEmI,其中mon为每个状态导通的绕组相数,电机内外定子绕组串联,串行磁路,即 I1=I2,φ1=φ2,则内外定子功率比

因此在实际设计过程中,内外定子功率分配比值应根据电机内部空间大小灵活选择,避免内定子槽满率过大,增加嵌线难度。由于水下电机定子长径比要求偏大,内外定子功率比一般设定在0.3以下。
3.2 定子设计
定子设计包括内外定子槽数和槽型的选择,铁芯材料的选择。内外定子槽数可以不等,可以相等,槽型可以相同,也可以不同,设计上比较灵活,主要考虑以下几个方面:
(1)内外定子绕组串联运行时,线规相同,为了使内外定子槽满率相差不大,可以选择内定子槽数少于外定子,以增大内定子槽面积。
(2)永磁电机的齿槽转矩的基波幅值与槽极数最小公倍数成正比,因此槽数和极数尽量接近以减小齿槽转矩,常用的槽极数关系为Z=2p±N,N=1.2。这种槽极数组合的绕组系数较大,提高了材料利用率。
(3)定子铁芯材料选择厚度小于等于0.5mm的冷轧硅钢片,当电机极数较多,转速较大时,可以有效降低铁芯损耗。
3.3 转子设计
结构设计。转子磁极采用径向充磁的瓦片形磁体,两端由端环固定,如图4(a)。对于水下电机,当采用充油均压结构时,要求气隙接触面尽量光滑,以减少由于充油造成的搅油损耗。此时内外表面可以用钛合金材料夹装做成光滑的杯形结构,如图4(b)图所示。由于钛是顺磁性材料,这样做虽然使等效气隙长度增加,增加了永磁体用量,但是也增加了转子结构强度,同时屏蔽掉一部分永磁体涡流损耗,使永磁体温升降低,对永磁体的腐蚀也能起到保护作用。永磁材料选择。第三代钕铁硼永磁材料具有较高的内禀矫顽力和高的磁能积,剩磁密度高达1.2T甚至更高,而且在震动、冲击、高压环境下的磁性能比较稳定,是水下电机的理想永磁材料。

图4 转子结构图
3.4 绕组设计
3.4.1 绕组形式
内外定子绕组串联运行,绕组形式可以相同,也可以不同。采用分数槽单节距绕组,可以减少用铜量、降低齿槽转矩。缺点是槽数和极数选择有严格的约束,绕组电感较大,电枢反应电动势含有大
量谐波,会引起转子涡流损耗和噪声。分数槽单节距绕组削弱了削弱了谐波电动势产生转矩的作用,一定程度上减弱了电机的出力性能。整数槽集中绕组反电势更接近方波,但是齿槽转矩较大,绕组有重叠,端部较长,虽然理论上比分数槽单节距绕组电机出力大,其用铜量也较大。本文只对分数槽单节距绕组和整距集中绕组的特性进行分析。
3.4.2 绕组系数计算
绕组系数计算公式

kd、kp分别为分布系数与短距系数。
整数槽集中绕组分布系数和短距系数均为1。对于分数槽单节距绕组,当槽数为奇数时,绕组不能连接成单层绕组,只能连接成双层绕组,槽数为偶数时既可以连接成单层绕组,也可以连接成双层绕组,而且有些偶数槽电机的分布系数在连接成单层和双层绕组时其分布系数不同,因此应分别对待。

电机槽数 Z=4mk,k=1,2,3…,当时 m=3,Z=12k,即槽数为12的倍数时,分数槽单节距绕组的绕组分布因数要分为单层绕组和双层绕组分别进行分析。以12槽10极电机为例,电动势相量星形图及绕组连接形式如图5所示。

图5 12槽10极电动势相量星形图及绕组连接形式
图6分别是单层、双层绕组的线圈合成电动势相量图,可以直观的看出单双层绕组分布情况是不同的。通过总结,槽数为12的倍数时,绕组分布系数计算公式为


图6 绕组槽电动势合成矢量图
2.4.3 绕组中线
当内外槽数不等时,同一相的绕组中线位置不一定相同,这就造成了内外定子绕组反电势时间上的错位,叠加后造成电机整体转矩输出减小。因此当内外槽数不等时,应该使同相内外定子绕组轴线正对。确定绕组轴中线位置的方法有两种,一种是有限元仿真法,根据有限元仿真的结果,观察反电势轴中线的位置,相反电势过零点即为该相绕组轴中线位置,对比内外定子同相反电势相位差,适当调整内外定子相对位置即可将轴中线对齐,另一种是解析的方法[8],即利用理论分析确定轴中线位置的的计算方法,公式为

x为轴中线沿圆周相对指定的第一个元件边的电角度,y为节距,c为每极每相槽数化为最简分数的分子。确定一相轴线位置后,另外两项轴中线位置分别为 x-120°、x+120°。
以内定子6槽,外定子12槽,极对数P=2双定子电机为例,外定子为整数槽集中绕组,y=3,内定子为分数槽单节距绕组y=1,则

4 仿真结果
本文采用场路结合的方法设计了一台双定子永磁无刷直流电机,采用内外槽数不等的形式以增加内定子绕组匝数,外定子12槽,内定子6槽,电机额定功率6000W,额定转速4500rpm,三相二状态导通方式。
使用用有限元软件ansoft对电机进行仿真,图7为电机磁力线分布图,图8为绕组中线重合时一相反电势波形图,从图中可以看出,采用仿真方法确定在绕组中线位置更直观。只要确定了一相绕组的中线位置所在的齿号或槽号,在定子安装时使之正对,就能够保证反电势过零点重合。
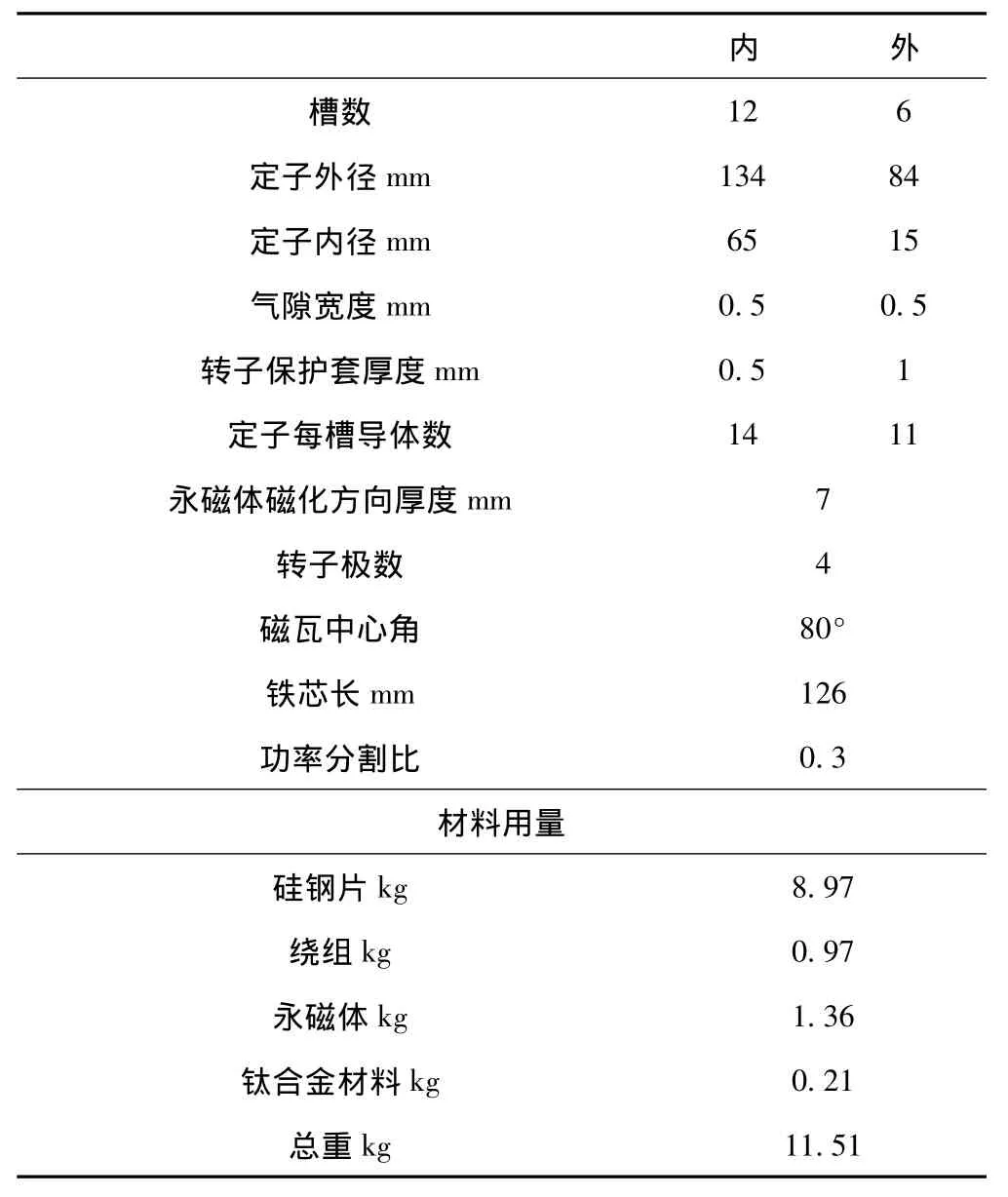
表1 设计参数
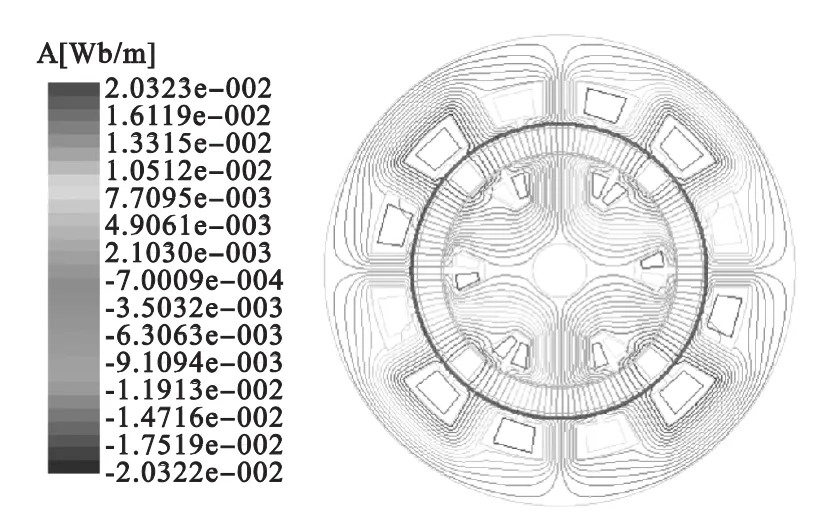
图7 电机磁力线分布图

图8 内外定子绕组中线正对时电机模型与一相反电势波形
5 结论
本文介绍了双定子水下电机的设计中的关键问题、电机结构和材料选择,分析推导了不同绕组形式绕组系数的计算方法,确定绕组中线位置的解析方法,并通过有限元软件给出内外定子槽数不等时绕组中线的定位方法,比解析法更直观简单。
[1]高威,马桂珍.深海资源概述[M].北京,深海矿产,2011.
[2]武建文,李德成.海洋水下机器人电动机分析[J].微特电机,2004(4).
[3]杨申申,王璇,汤国伟.无位置传感器无刷直流电机在水下工程领域应用[J].海洋工程,2009,27(4),
[4]双定子永磁同步电动机的结构设计[J].微电机,1999,32(6):12-14.
[5]王雅玲,徐衍亮,刘西泉.双定子永磁同步发电机(I)(II)(J).电工技术学报,2011.
[6]Yubin WangMing,ChengYing Fan,K.T.Chau.Design and Analysis of Double-Stator PermanentMagnet Brushless Motor for Hybrid Electric Vehicles.Electrical Machines and Systems,2008.ICEMS 2008.
[7]Chai Feng,Xia Jing,Guo Bin and Cheng Shukang.Double-Stator Permanent Magnet Synchronous In-Wheel Motor For Hybrid Electric Drive System.14th Symposium on Electromagnetic Launch Technology,Victoria,British Columbia,Jun,2008.
[8]刘细平,林鹤云,杨成峰.双定子永磁电机内外定子(槽数不等时)绕组相轴相对位置确定方法[J].电工技术学报,2009,24(4):60 -65.
猜你喜欢
电工技术学报(2023年14期)2023-07-26 06:11:16
大电机技术(2022年5期)2022-11-17 08:12:56
防爆电机(2020年4期)2020-12-14 03:11:02
电子制作(2017年1期)2017-05-17 03:54:12
微特电机(2016年9期)2016-12-20 05:18:48
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
电子设计工程(2015年3期)2015-02-27 12:03:40
电气电子教学学报(2013年2期)2013-01-27 01:07:34
新高考·高一物理(2012年5期)2012-04-29 20:27:57