
提高链式STATCOM非对称故障运行能力的控制方法
2015-09-21 10:08:36林建熙袁志昌杨银国
电力自动化设备 2015年12期
林建熙,袁志昌,杨银国,易 杨
(1.广东电网公司电力调度控制中心,广东 广州 510600;2.清华大学 电机工程与应用电子技术系,北京 100084)
0 引言
单相逆变器串联构成链式多电平逆变器是实现逆变器大容量化的一种途径,相比三电平、五电平等拓扑结构,链式多电平结构具有电路元件少、控制相对简单、可靠性高等优点,在静止同步补偿器(STATCOM)等柔性交流输电场合得到广泛应用[1-6]。
由于非对称故障在电网中发生的概率远远高于对称故障,因此,STATCOM能否在电网非对称故障下持续稳定运行是发挥其动态无功支撑能力的重要前提。近年来,STATCOM应对非对称故障的研究受到越来越多的重视[7-17]。 文献[7-11]主要研究了共用一个直流电容的三相全桥式STATCOM在非对称故障下的控制方法,但该方法不适用于三相直流电容独立的链式结构STATCOM。三相直流电容独立的特性使得链式STATCOM在非对称故障下的控制方法更为困难[12]。文献[13]提出一种基于零序电压注入的控制方法,该方法在电网电压严重不对称时向直流电容注入较大的零序电压,对直流电容耐压能力要求过高。文献[14]通过独立控制三相有功功率来平衡直流电容电压,然而未考虑电网电压不对称时的情况。文献[15]中根据电压不对称度分别计算零序电压和负序电流控制量,然而由于没有分析直流电压持续稳定运行的条件,在严重不对称时可能出现失稳。
本文首先建立链式STATCOM等效数学模型,分析其在电网不对称时的运行特性。根据三相直流电容能量平衡的要求推导出链式STATCOM在非对称故障下的控制策略,进一步提出一种分相直接电流跟踪的控制器结构,讨论了非对称故障下控制参数选取方法。本文通过PSCAD平台的数字仿真验证了所提方法的有效性。
1 链式STATCOM数学模型
图1给出的是三角形接法的链式STATCOM结构图,与传统的三相桥式STATCOM的主要区别在于链式STATCOM的直流电容是各自独立的,这使得两者的数学模型以及运行特性存在差异。
在建立链式STATCOM数学模型时,将串联单相桥组成的逆变器用理想电压源等效,其损耗用电阻等效,连接变压器也用等效漏电抗和代表损耗的等效电阻表示,得到如图2所示的等效模型。图2(a)是主电路的简化模型,图2(b)是一相逆变器的简化模型,N个单相桥有N个独立的电容,各自的电容电压为 udc1、udc2、…、udcN。 Rp代表电容的漏电阻以及逆变桥的并联型损耗。
根据图2的等效模型,列写链式STATCOM数学模型:
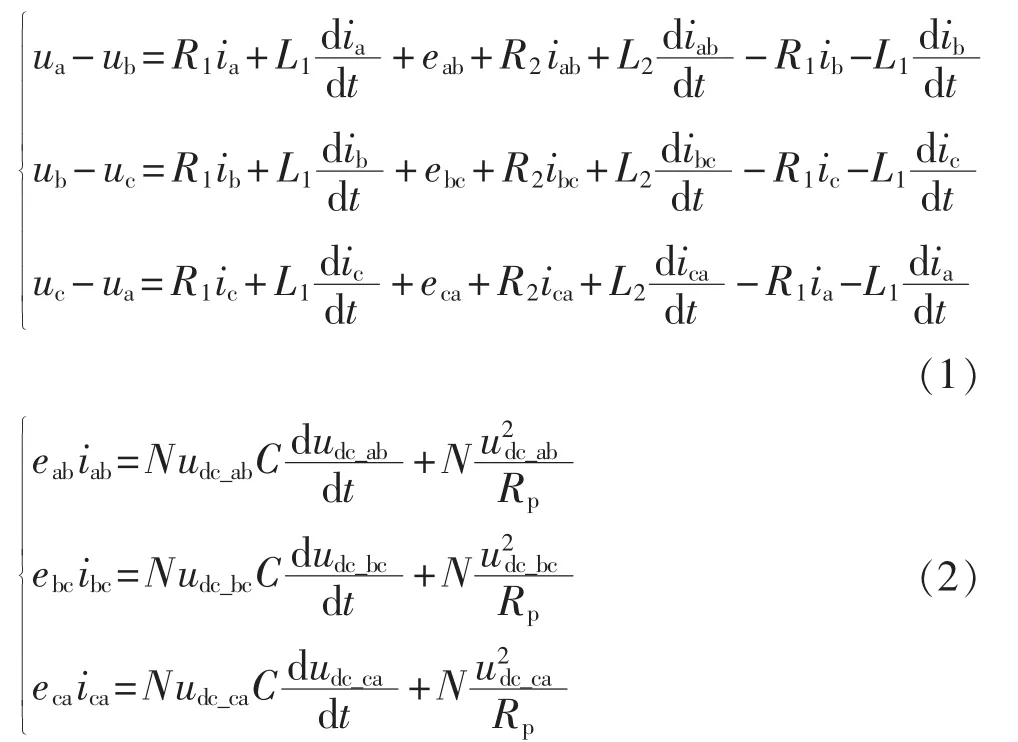
其中,udc_ab、udc_bc、udc_ca分别为 ab、bc、ca 相各单相桥直流电压平均值。
在式(1)、(2)的基础上经过合理的简化和推导,可以得到三相之间没有互相耦合的链式STATCOM,其单相状态方程为[18]:
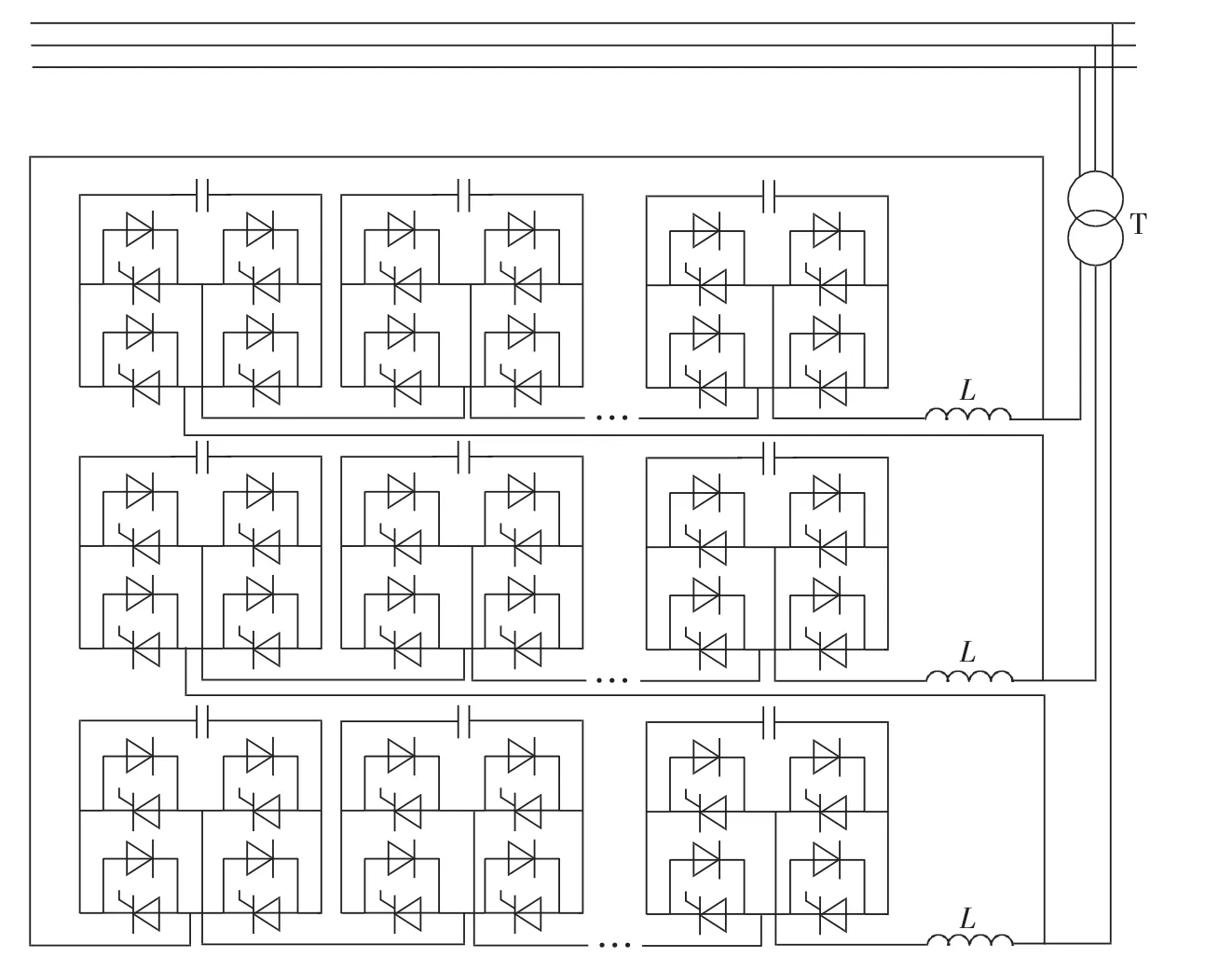
图1 三角接链式STATCOM结构简图Fig.1 Simplified structure of STATCOM with△configuration

图2 链式STATCOM等效简化模型Fig.2 Simplified equivalent model of cascaded STATCOM
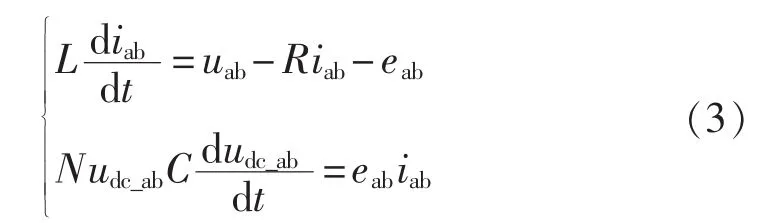
其中,R=3R1+R2,L=3L1+L2,并忽略了并联型电阻,即Rp=∞。
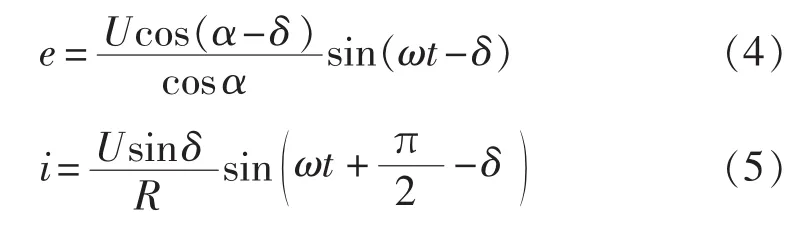
根据文献[19]的分析,单相STATCOM达到稳态时,流过直流电容的功率全为无功分量,电容电压由直流叠加2倍工频的交流纹波组成。记系统电压u=Usin(ωt);STATCOM 的连接阻抗 Z=R+jωL=,R为等效电阻,L为连接电感,阻抗幅值,阻抗角 α=arctan(ωL/R);PWM 的等效开关函数为 msin(ωt-δ),m 为调制比,δ为逆变器输出电压落后系统电压的相移角。在这种系统条件和控制作用下,单相STATCOM稳态输出电压和电流为:
一相串联各单相桥电容电压之和的直流分量:

从系统吸收无功(定义容性无功时符号为负):

2 不对称故障下的运行特性和控制方法
当系统电压不平衡时,可设其成分如下:
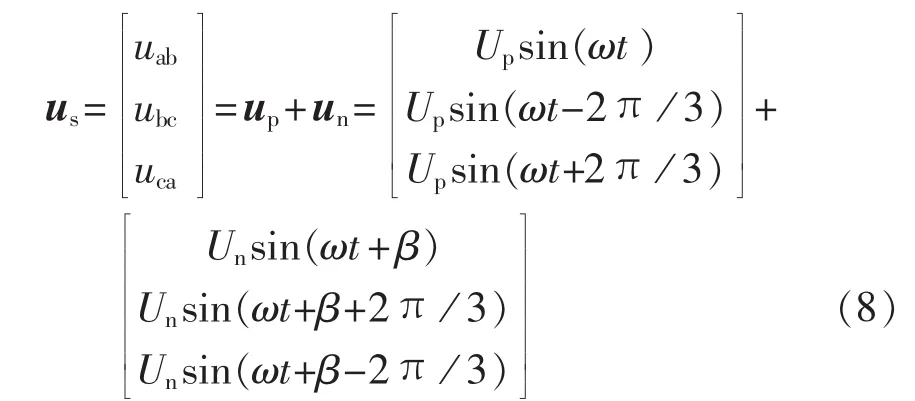
其中,up、un分别为系统电压的正序分量和负序分量,其幅值分别为Up和Un;β为ab相正序电压和ab相负序电压之间的相位差。
链式逆变器输出电压不含有零序分量,否则链式STATCOM环内将包含零序电流。可设逆变器输出电压为:
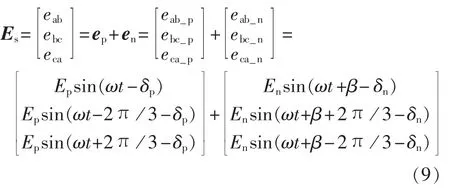
其中,下标p和n分别表示正序、负序分量;ep、en分别为逆变器输出电压的正序分量和负序分量,其幅值分别为Ep和En;δp为逆变器输出正序电压落后系统正序电压的相移角;δn为逆变器输出负序电压落后系统负序电压的相移角。
根据常微分方程的性质,系统电压不对称时,链式STATCOM的输出电流由两部分组成,分别是正序电压和负序电压单独作为激励施加于系统方程式(3)得到的响应。考虑到式(5)的稳态电压与电流的相位关系,可记输出电流为:
其中,Ip和In分别为逆变器输出电流正、负序分量的幅值。
链式STATCOM的直流电容侧没有电源支撑,需要由电网系统提供有功以建立直流电压,稳态时电网提供的有功功率和装置的损耗达到平衡,电容电压维持恒定。如果这一平衡被破坏,并且不能在一个新的运行点达到平衡,则STATCOM将不能正常工作。
当系统电压不平衡时,用对称分量法将其分成正序分量和负序分量,控制链式STATCOM也输出不平衡的电压,根据式(3)的特性和常微分方程的叠加原理,正序电压作用于STATCOM产生正序电流,负序电压产生负序电流,2种成分彼此独立。此时,链式STATCOM可看成由一个“正序STATCOM”和一个“负序STATCOM”组成。根据式(6),对于每一相逆变器而言,正、负序2种成分的电压电流产生的功率均流入该相直流电容,并影响电容电压的升降,可见,直流电容是联系“正序STATCOM”和“负序STATCOM”的枢纽。必须协调正、负序2种功率成分对直流电容电压的影响,建立并支撑起稳定的直流电压,才能保证链式STATCOM在不平衡系统工况下持续稳定工作。
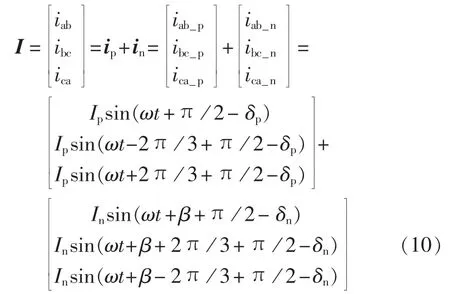
不失一般性,以ab相为例,分析流过直流电容的功率:

将式(8)和式(10)的电压、电流代入式(11)中得到构成Pab的4项分别为:
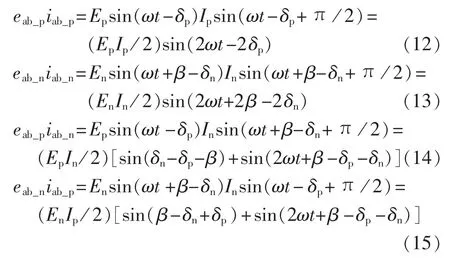
其中,eab_piab_p和eab_niab_n都为2倍工频的正弦量,这种功率只造成电容电压的2倍工频纹波,不影响其直流分量的大小;eab_piab_n和eab_niab_p则不仅有正弦量,还包含直流量,直流量之和如式(16)所示。

式(16)是影响电容电压的主要因素,为防止直流电容电压发散,保证STATCOM的正常运行,必须选择合适的控制量使得:

由于β是ab相正序电压和负序电压的相位差,可能为任意值,因此式(17)成立的唯一条件是:

根据式(4)和式(5),系统电压不平衡时,链式STATCOM逆变器输出的电压和电流的正、负序分量为:
代入式(18)中并整理,得:


对bc和ca相进行类似的分析可以得到同样的结果。式(21)保证了没有直流的功率注入电容,它描述了对逆变器输出正、负序电压相移角的限制。接下来讨论对另一个控制量,即逆变器输出正、负电压调制比的限制。在分析单相STATCOM的特性时已经指出,稳态时逆变器输出电压的幅值只和系统电压以及相移角有关,与调制比无关,调制比的作用是调节直流电压的高低。系统电压不平衡时,正序和负序的调制比都可以调节直流电压的高低,然而直流电压最终只能稳定在一个水平上,因此正、负序调制比也是要受到限制的。由PWM的开关函数可知,逆变器输出正、负序电压的幅值分别为:

将式(22)Ep和 En的值代入式(19),得到:

由于δp=δn,正、负序调制比应满足的关系为:

按照式(21)和式(24)表征的控制量控制就是系统电压不平衡时链式STATCOM的最优控制模式。由于充分考虑了系统与STATCOM装置间能量的流动关系,协调了正序和负序2种成分的功率对直流电容电压的作用,使得装置可以持续稳定地运行。
3 分相直接电流跟踪控制器
3.1 控制器结构
由第2节的分析可知,最优控制模式下的链式STATCOM可等效成3个相移角一致的单相STATCOM。根据这个特性,本文设计了一种分相直接电流跟踪控制器,其结构如图3所示。
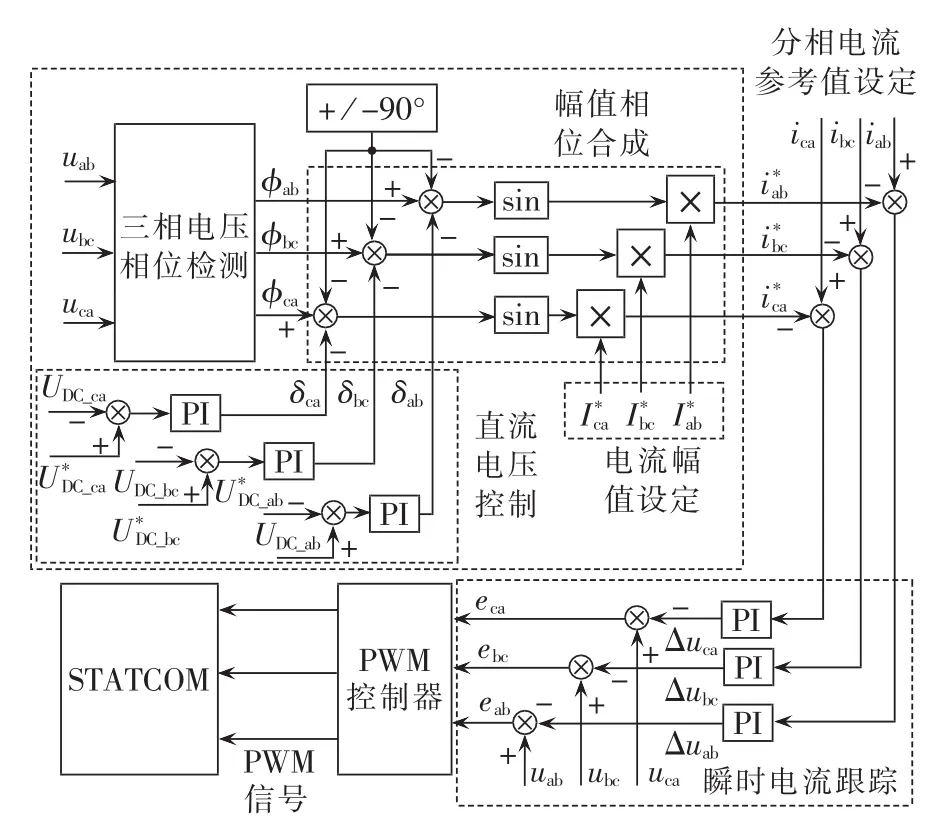
图3 分相直接电流跟踪控制器Fig.3 Split-phase direct-current tracking controller
该控制器主要由分相电流参考值设定和瞬时电流跟踪两部分组成。其中瞬时电流跟踪部分计算三相实际电流与参考值的误差,并通过一个PI环节产生三相逆变器需要输出的电压偏差,叠加到当前时刻的系统电压并标幺化后产生所需的调制波信号。分相电流参考值设定部分包括电压相位检测、直流电压控制、电流幅值设定、幅值相位合成4个模块。
相位检测模块实现对各种工况下系统三相电压的独立锁相。一种快速的软件锁相方法可参考文献[18,20]。
直流电压控制模块由3个PI调节器组成,分别对三相直流电压进行反馈调节,其输出则作为相移角δ加到系统电压相位上。
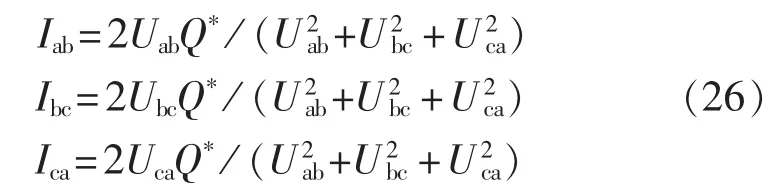
电流幅值设定模块的功能是根据上层控制器设定的无功参考值计算三相逆变器需要输出电流的幅值。式(19)—(21)表明,最优控制模式下,三相相移角相等,输出电流幅值与系统电压幅值成正比。为了使该控制方法同时适用于系统电压平衡和不平衡的条件,三相电流幅值应满足:

其中,Uab、Ubc、Uca为三相系统电压的幅值。 另一方面,应使STATCOM输出总无功等于参考值Q*,综合上述两方面的要求可以按照下式计算三相参考电流的幅值:
幅值相位合成模块将设定的电流幅值和相位组合成一个正弦交流量,作为STATCOM输出电流需要跟踪的参考值。电流参考值的相位包含三部分:系统电压的相位角ωt+φ,由相位检测模块检测得到;表征系统向装置注入有功功率大小的相移角δ,由直流电压控制模块产生;电流领先/滞后系统电压的相位角±π/2,根据系统吸发无功的需要决定,发无功时电流需领先电压π/2,吸无功则落后π/2。
3.2 控制器性能
瞬时电流跟踪控制的结构可以简化成图4的框图。根据式(3)的单相STATCOM数学模型,可以推导出单相STATCOM输出电流I(s)与作用在连接阻抗上的电压差Ue(s)之间的开环传递函数为:

其中,L为连接电感;R为等效电阻。加入PI调节器后,系统的闭环传递函数为:

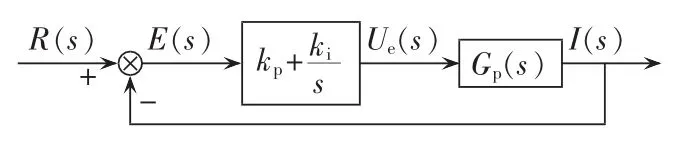
图4 分相直接电流跟踪控制框图Fig.4 Block diagram of split-phase direct current tracking controller
(1)稳定性分析。
分相瞬时电流跟踪控制的闭环传递函数式(28)的稳定性取决于极点在s平面上的位置,求解方程Ls2+(R+kp)s+ki=0得到系统的2个极点:

由于 L>0,R>0,PI参数 kp>0、ki>0,对于式(29)描述的 2 个极点,若(R+kp)2-4Lki<0,则 2 个极点为s负半平面内的一对共轭极点;若(R+kp)2-4Lki>0,则由于个极点均位于s负半平面的实轴上,可见只要PI参数均为正数,系统就是稳定的。
(2)稳态误差分析。
记输入信号为单位正弦电流,r(t)=sin(ωt),其拉氏变换为 R(s)=ω /(s2+ω2),输入、输出之间的误差为:
在关于系统稳定性的分析中已经说明,当选取PI参数均为正数时,闭环系统的2个极点p1和p2都有负实部,误差中的前2项将慢慢衰减,稳态时衰减为零,所以稳态误差只和E(s)的后2项有关。
图5给出了不同的PI参数下,误差幅值的变化情况。可以发现,误差主要由比例系数kp决定,受积分系数ki的影响很小。随着比例系数kp从0增大到5000,稳态误差的幅值以指数级数的速度从1快速减小到0.02以下。当kp>1500时,稳态误差的幅值已经小于0.05。
(3)动态性能。
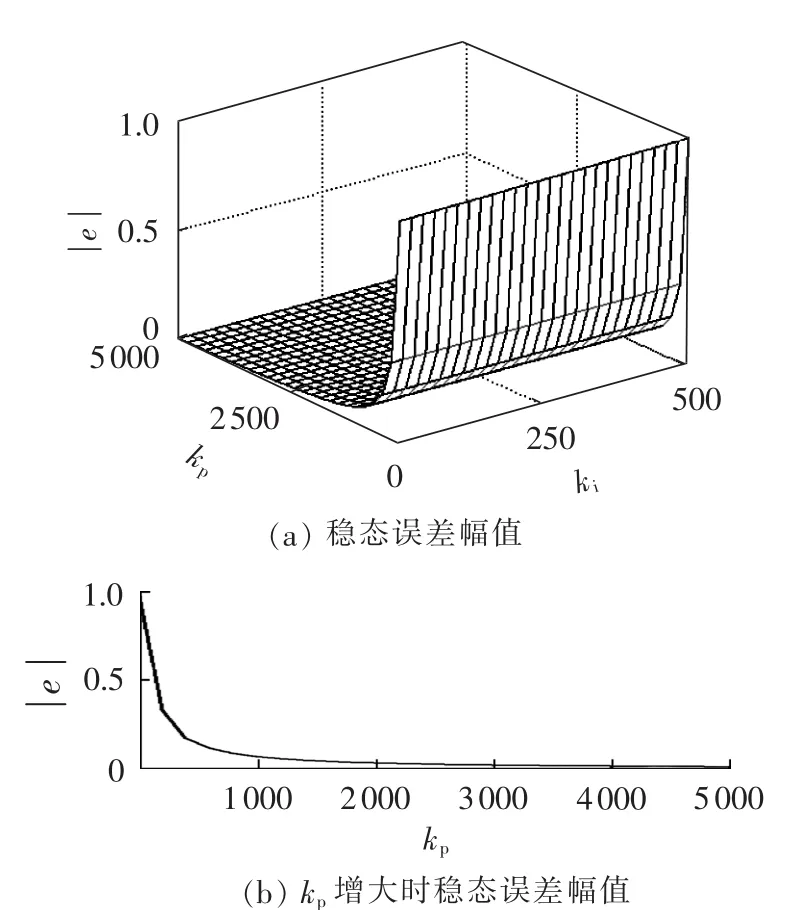
图5 分相直接电流跟踪控制器稳态误差特性Fig.5 Steady-state error of split-phase direct current tracking controller
尽管系统的参考输入为正弦交流量,但闭环系统的动态性能仍然只取决于其零极点的特性。由于积分系数对于稳态误差的抑制作用很小,故可选择非常小的积分系数ki,其作用主要是消除直流扰动对输出的影响。由式(29)可知,此时系统有2个位于负实轴的极点,其中非常接近虚轴,而系统的零点也非常接近于虚轴,根据极零点对消的原理,系统的动态性能由远离虚轴的极点决定。 选取合适的kp,可以获得满意的动态性能,仿真表明,当ki=10、kp>250,系统的动态响应时间可小于5 ms。为了减小噪声的影响,一般可在[250,500]之间选择比例系数kp。
4 仿真验证
在PSCAD平台上建立链式STATCOM仿真模型,其结构如图6所示。
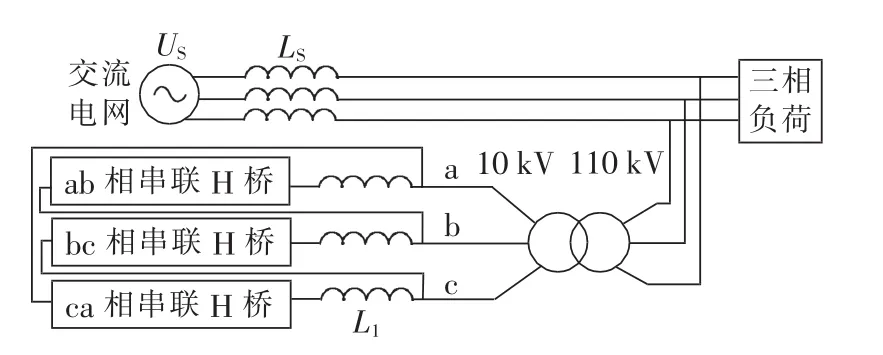
图6 链式STATCOM仿真系统接线图Fig.6 Wiring diagram of cascaded STATCOM simulation system
三相逆变器采用三角形接法,每相串联一个限流电抗器,三相逆变器通过一个升压变压器接到110kV交流母线上。受PSCAD软件的节点限制,每相逆变器串联4个单相逆变桥,采用150 Hz优化PWM。各电气元件参数如下:电网参数,线电压110 kV,短路电感0.084H;变压器参数,容量50MV·A,漏抗16%;负荷参数,恒电阻RL=136 Ω,恒电感LL=0.17 H;STATCOM参数,连接电感0.003H,连接电阻0.004Ω。
仿真过程如下:t=0.25 s时刻,STATCOM由0无功阶跃至发50 Mvar无功,从t=0.4 s至t=0.7 s间,系统发生不对称故障,电压含有50%的负序分量,t=0.7 s时,不对称故障切除。
图7给出的是系统电压平衡时,STATCOM由0无功运行状态阶跃至发50 Mvar无功的动态响应过程,电流跟踪控制器的参数为kp=450、ki=10。线电流无功分量动态无功响应时间约为7 ms。系统电压平衡时,相电流的正弦度较高。
图8给出ab相的参考电流、输出电流以及它们之间的误差电流。kp=450时,输出电流和参考电流的幅值比较接近,但是相位存在一定误差,误差电流的幅值约为参考电流的20%。若增大比例系数至kp=1500,输出电流和参考电流基本重合。
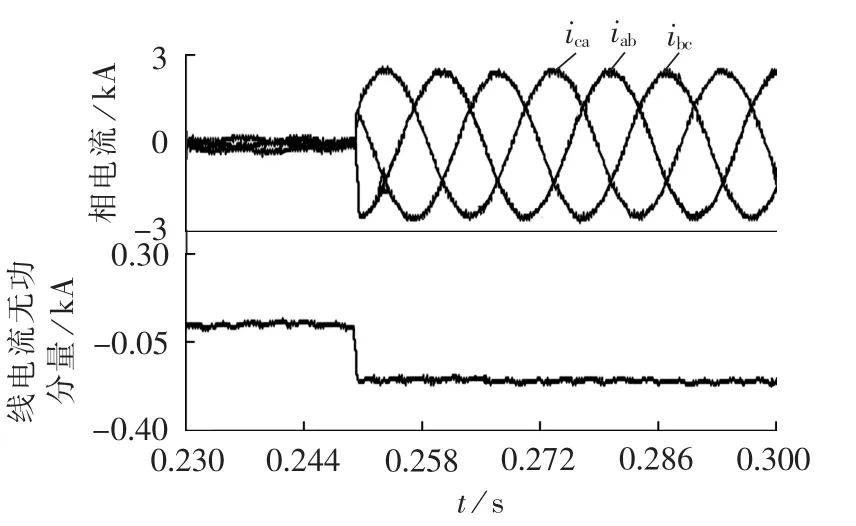
图7 分相直接电流跟踪控制的动态性能Fig.7 Dynamic response of split-phase direct current tracking controller

图8 稳态跟踪误差Fig.8 Steady-state tracking error
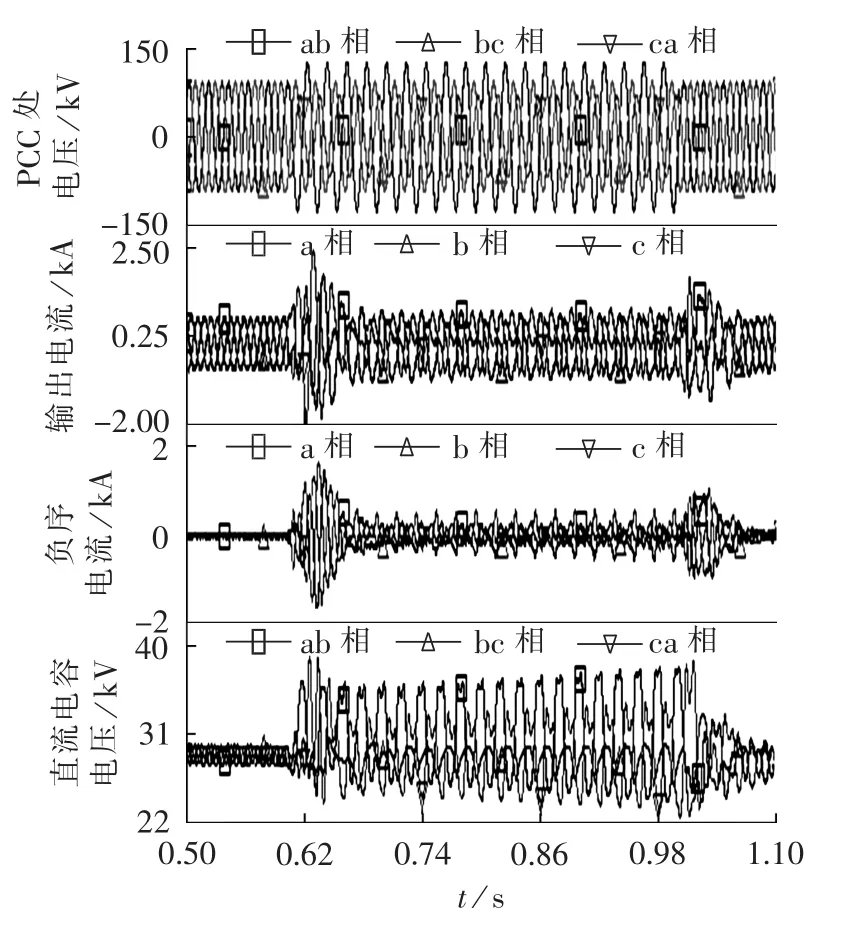
图9 常规控制器的仿真结果Fig.9 Simulative results of normal controller
图9给出是系统电压不平衡时,常规正负序解耦控制器的控制效果,其中负序电流参考值设定为零。在t=0.6 s到t=1 s之间,交流电网发生单相对地故障,系统含有20%的负序电压。负序刚出现的时刻,由于负序电流控制还来不及反应,装置出现过流;其后负序电流控制器开始作用,负序电流在一定程度上被抑制。然而由于注入三相电容的功率不平衡,电容电压已经分离,并且各自的纹波也不相等,造成输出电流含有较大的谐波分量,电流严重畸变。
图10给出的是系统电压不平衡时,采用本文提出的分相瞬时电流跟踪控制性能的仿真结果。在0.4~0.7 s之间,系统电压含有50%负序分量,STATCOM按照最优控制模式分别设定三相电流的参考值,输出电流幅值与该相系统电压幅值成正比,并保证三相输出无功之和为50 Mvar。仿真结果中,链式STATCOM相电流和输出无功的情况反映了这种重新分配的结果:系统电压平衡时,三相各输出16.6 Mvar无功;在不平衡期间,ab相电压最高,输出的无功为26 Mvar,bc 相次之,输出无功 20 Mvar,ca 相最低,输出无功4 Mvar。由于直接对电流瞬时值进行反馈控制,系统电压的变化情况实时地反映到三相逆变器的调制波中,有效地保证了在系统电压不平衡期间STATCOM不出现过流。相电流的波形有一些畸变,其主要的谐波含量为3次,这是三相电容电压的纹波不一致引起的,链式STATCOM采用了三角形接法,相电流的3次谐波不会流入系统。
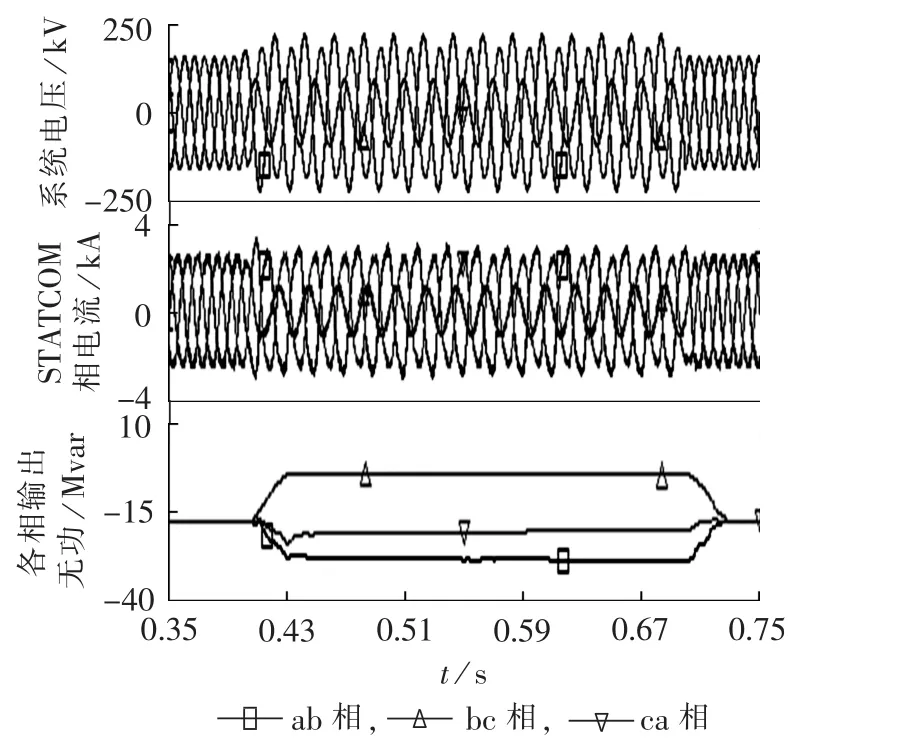
图10 采用本文控制方法的仿真结果Fig.10 Simulative results of proposed control method
系统电压不平衡下最优控制模式的最大优点在于充分考虑了流入链式STATCOM逆变器直流电容的功率关系,从能量平衡的角度设定三相逆变器输出电流的大小和相位,从而避免了不恰当的运行模式可能造成的三相电容电压分离以及由此引发的谐波、环流、过电流等现象。图11是对这种特点的仿真说明,在不平衡刚出现的时刻,三相电容电压出现分离的趋势,但是通过分相瞬时电流跟踪控制中直流电压控制环节的作用,调节了三相逆变器的相移角,抑制了电容电压分离的趋势。稳态时,由于三相输出无功不相同,电容电压的纹波不一致,但是其直流分量是相等的。同样,三相相移角的直流分量也基本一致,这正是实现最优控制模式的前提。
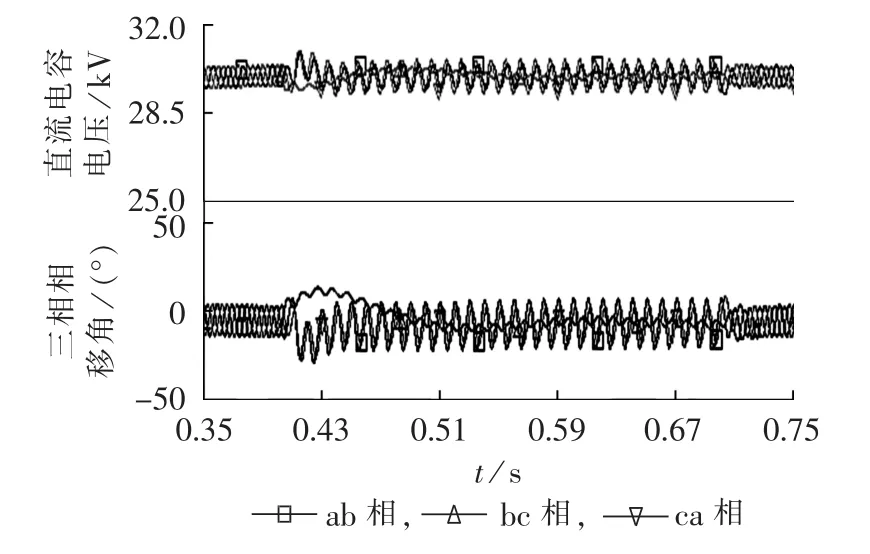
图11 链式STATCOM直流电压和相移角Fig.11 DC voltage and phase displacement of cascaded STATCOM
5 结论
STATCOM广泛应用于电网系统提供快速的动态无功支撑以防止暂态电压崩溃。由于电网中非对称故障发生概率远远高于对称故障,研究非对称故障下STATCOM的控制策略是拓宽装置安全运行范围、充分发挥装置效用的必要手段。无零序输出电压时,链式STATCOM可等效成3个单相STATCOM,各相直流电容具有独立的能量通路。基于三相直流电容能量平衡的原则,本文提出一种非对称故障下链式STATCOM的控制策略,可以协调正序电量与负序电量对电容电压的影响,确保装置持续稳定运行。依据本文提出的控制规律设计了分相直接电流跟踪控制器,具有稳态误差可控、参数整定简单、动态响应快速等优点。仿真结果表明,本文提出的控制策略可以有效避免链式STATCOM在非对称故障下容易出现的过流或畸变,有效拓宽了装置的安全运行区。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:36
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
西南交通大学学报(2018年6期)2018-12-18 02:22:18
测控技术(2018年10期)2018-11-25 09:35:38
黑龙江电力(2017年1期)2017-05-17 04:25:05
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年4期)2015-04-12 00:43:08
电测与仪表(2015年4期)2015-04-12 00:43:08
电测与仪表(2015年12期)2015-04-09 11:44:44
中国工程咨询(2015年10期)2015-02-14 05:57:18
