Trimble V8型机器人测量放样系统在工程施工中的应用
2015-09-18 06:05:22
建筑施工 2015年1期
中国建筑第八工程局有限公司总承包公司 上海 200135
1 工程概况
上海某旅游度假区主入口和花园区域共包含22 个(套)单体建筑、管线设施和大面积的花园景观建设。2 个区域各有特色,主入口区域为有着丰富外立面的百货商店、面包房等建筑,花园区为2 个小型游乐设施和梦幻般的景观等内容。
2 工程的特点、难点和采用TrimbleV8机器人测量放样系统的原因[1-3]
工程的特点:工期紧;工序复杂;场地面积大、单体多,分布散;需测设点位多;精度要求高。
测量工作主要有以下难点:
1)娱乐性、主题性的建筑设施和场地造型奇异、铺装复杂,场地铺装给定的基准坐标点位就多达7 810 个,弧线挡土墙多达1 035 条,单体建筑结构定位点约6 288 个;
2)地下管网空间状复杂分布,管线全部需要用全站仪放设定位,需放设点位约3 747 个;
3)业主只给出3 个测量控制基准点,其余绝大多数坐标需根据基准点计算或由Revit模型、CAD图纸等获取。
传统的全站仪测量方式有如下缺点:
1)不能对接Revit和CAD等图形软件,点位坐标要用人工计算(或加插件软件取点)、手工输入全站仪中,需要消耗大量的人力和时间,且易出错;
2)传统全站仪全由人工操作,受操作方式限制,测量、放样所需时间长,难以提高效率。
而采用Trimble机器人V8测量放样系统可克服上述缺点,增加测量放线效率,减少过程投点质量问题,降低测量及技术人员劳动强度,可迅速推进工程进展,这就是我们采用Trimble V8机器人测量放样系统的原因。
3 Trimble V8机器人测量放样系统
3.1 系统组成
Trimble V8机器人测量放样系统主要由软件和硬件两部分组成(图1)。软件:Point Creator用于从CAD和Revit等图形软件取点坐标等;手部读图软件,用于读取导入到手部中的经过转换格式的CAD和Revit等图纸。硬件:全站仪,精度2″,可以自动捕捉棱镜并对中;手部,可与Point Creator对接直接获取点列表、背图纸和3D模型等,可以远距离控制全站仪;360°反光棱镜,可以被全站仪360°全方位捕捉。
3.2 系统特点与优势
Trimble V8机器人测量放样系统的优点就是能很好地解决快速、精确测量放线的需求。
1)和CAD/REVIT完美对接,自动在图形软件中取得点位的二维/三维坐标。Trimble具有Point Creator功能软件,安装此插件后,CAD和REVIT软件工具面板中将产生Point Creator工具栏,可以在CAD和REVIT中直接获取和保存点的坐标并按需要生成列表,将其和对应图纸导入到手部或者全站仪。然后在测量、放样中直接调用,互为参照(图2~图4)。
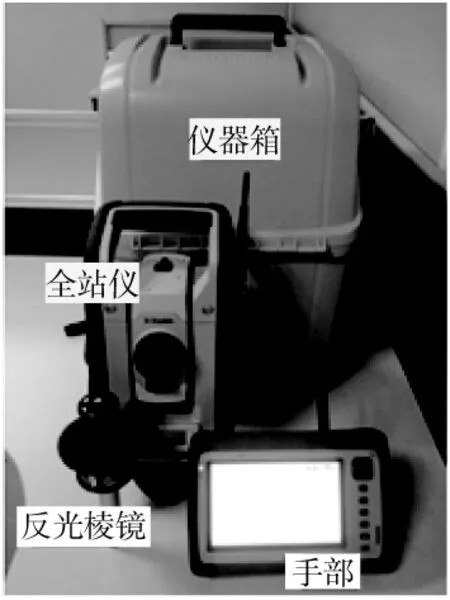
图1 Trimble V8 机器人
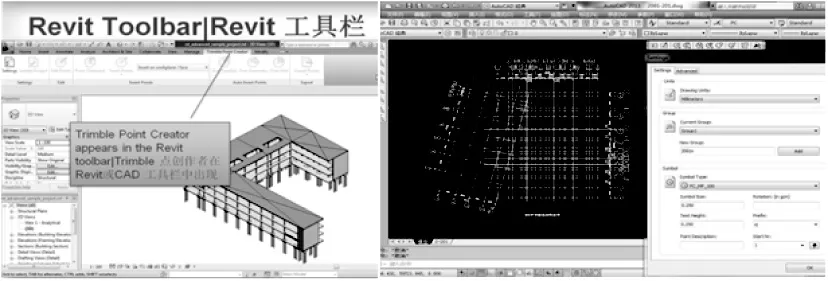
图2 对接REVIT和CAD软件取点工具栏界面

图3 选取生成坐标的点生成的点列表
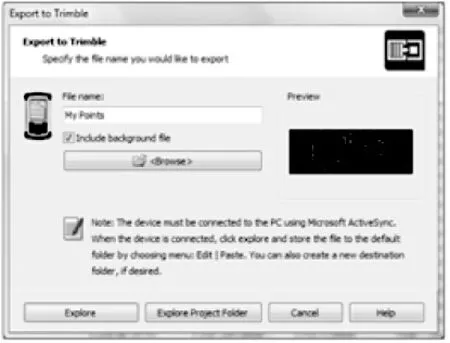
图4 获取的点坐标和图纸导入到Trimble系统手部
2)指导测量员测量放样,减少测量放样时间。
(1)设置好后视点后,系统自带的全站仪可以自动指向需放样点的方位,指导测量人员找到点位。
(2)360°反光镜,可以360°全方位捕捉。
(3)测量、放样时全站仪镜头可以自动跟踪,捕捉反光镜并自动对中,极大简化了人工将镜头对准反光镜的操作,且避免人的操作误差,准确性高。如果周围环境复杂、有雾、或者全站仪距离反光镜的距离过远,全站仪不能自动捕捉到反光镜或者捕捉时间过长,可以使用手部远距离操作全站仪镜头转向,对正镜头方位。
(4)可以将实际测量所得点位信息直接保存在手部,导入计算机后可以直接生成实测点位分布图,便于分析工程实体与设计的偏差。降低人员工作量(图5、图6)。
3)磁浮系统、自动马达控制全站仪转动、指向。
(1)仪器整平快速可靠。
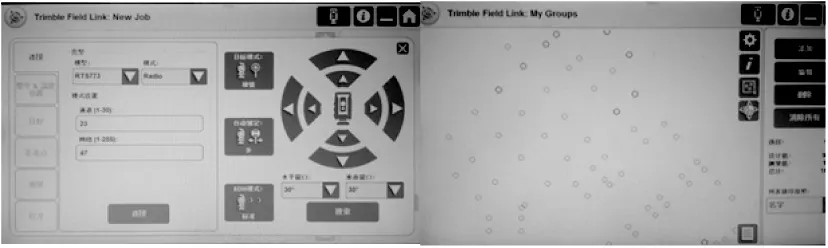
图5 Trimble手部控制全站仪界面实测点位图在Trimble手部中显示界面
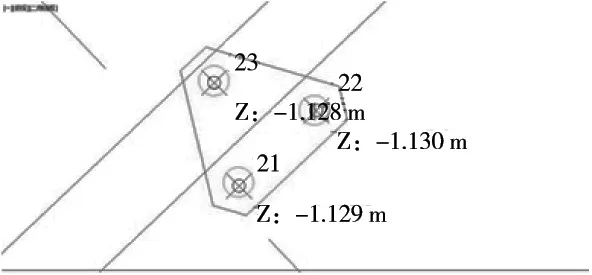
图6 导入的Trimble实测点位图与设计图纸结合分析桩位偏差
(2)无需人员触碰操作全站仪,避免人为因素碰撞仪器,保持全站仪一直处于水平状态,也避免了人为操作造成的误差。
4)手部读图软件可以读取特定格式图纸,并直接在手部上完成取点坐标等操作。
(1)测量时有参照,使放样更加具体,更有参照。
(2)可以在手部上取点,使测量放样工作更加适应现场实况。如放线过程中有点被障碍物挡住,可以直接从手部上取该线上的另一点放设,而不必重新取点计算,节约了时间和人力。
3.3 系统一般操作流程
3.3.1 放样操作流程
在计算机中安装Point Creator软件→打开图形软件,使用Point Creator在图形中选取需要坐标的点,生成点列表→将点列表和CAD图纸或3D模型导入手部→现场在机器人测量放样系统的指导下实际放样
3.3.2 测量操作流程
现场实际测量→自动记录保存测量数据→生成实测点位分布图→与理论值对比分析
4 Trimble V8机器人测量放样系统投入工程应用程序
根据Trimble V8机器人测量放样系统的自身特点和项目的工程实际,制定了4 个工程应用程序。
4.1 程序1
实施项:专业培训Trimble V8机器人测量放样系统的使用方法及注意事项。目标:使测量人员掌握使用系统,掌握系统的保养及注意事项。
4.2 程序2
实施项:在Trimble专业培训人员的陪同指导下,进行系统的试验性工程实践。目标:将培训对接生产,提升相关人员的系统工程实践应用能力,更熟练仪器的操作和注意事项,并在实践应用中发现并解决一些问题,为日后项目部独立使用本系统打下基础。
4.3 程序3
实施项:使用2 种系统先后进行某单体的桩位偏差复核,比较传统测量系统和Trimble V8系统的测量结果和工作效率。目标:通过工程实践应用分析、明确Trimble系统的精度及效率。
4.4 程序4
实施项:独立使用Trimble V8系统进行工程施工应用,与Trimble专业培训人员保持密切联系,遇到问题迅速联系解决。目标:独立、熟练使用系统,切实推进工程进度,减少测量工序时间。
5 Trimble V8机器人测量放样系统在施工中应用的优点和待改进项
5.1 优点
1)建筑小品放样、桩位偏差分析、轴线控制点测设、管线坐标测设可将现场操作效率提高至3~5 倍。
2)内业取点、将点位信息输入至全站仪、将实测信息反馈到电子图纸的效率提高至5~7 倍。
3)取点、输入点一次性正确率提高10%左右。
5.2 待改进项
自动捕捉有时候会被穿反光背心的人的反光背心混淆,全站仪镜头会跟随穿反光背心的人的反光背心转。经过实践,我们的解决措施是:通过手部控制全站仪镜头指向,效果良好。
6 结语
同传统全站仪的测量方式相比,Trimble V8 机器人测量放样系统具有取点方便准确、自动化程度高、适用范围广、人员操作简单,测量放样效率高等优点。对于加快测量放样工序时间、提高测量放样准确性、降低测量人员工作强度有积极意义。对类似工期紧、单体多、测点多、测量放样精度要求高的工程有很好的推广应用价值。
猜你喜欢
诗歌月刊(2022年2期)2022-03-15 21:50:24
装备制造技术(2021年4期)2021-08-05 07:40:24
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
制造技术与机床(2018年12期)2018-12-23 02:41:18
作文评点报·初中版(2017年33期)2017-09-09 19:46:22
测绘科学与工程(2016年4期)2016-04-17 06:51:08
电测与仪表(2016年9期)2016-04-12 00:29:52
第二课堂(课外活动版)(2015年3期)2015-10-21 19:41:19
河南科技(2014年5期)2014-02-27 14:08:32