
上海自然博物馆(新馆)“细胞壁”式钢结构成套施工技术研究
2015-09-18 05:57
建筑施工 2015年7期
上海市机械施工集团有限公司 上海 200072
1 工程概况
上海自然博物馆(新馆)(上海科技分馆)工程位于上海静安区山海关路、北京西路、石门二路地块, 建筑总高度18 m,地上3层,地下2层。建筑的整体灵感源于鹦鹉螺的壳体形式,建筑核心区域“细胞壁”为兼顾结构性承载和勾勒建筑造型的艺术钢结构。网壳平面投影为“鹦鹉螺”形,立面为同心不同轴空间展开椭圆面(图1)。
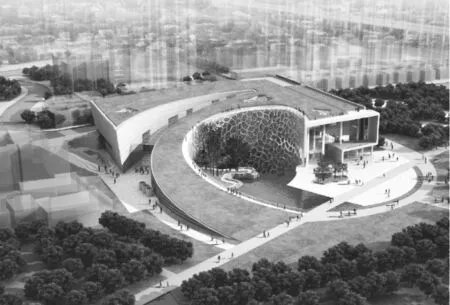
图1 上海自然博物馆工程效果图
“细胞壁”结构体系为空间异形竖向承重网壳,以五边形和六边形网格组成的空间异形不规则单层网架(结构外边缘处为三角形和四边形形式),整个建筑造型呈半椭圆形螺旋上升,结构形态垂直竖立于地面,弧形中部向椭圆内倾斜(最大内倾5 m),结构最高处为32.2 m。
“细胞壁”由核心区、延伸区、悬挑区组成(图2)。核心区自-16.1 m起,最高达16.1 m;延伸区自-0.50 m起,最高达7.5 m;悬挑区自5.6 m起,最高达16.1 m。钢构件均采用焊接箱形截面,截面规格为500 mm×275 mm×16 mm×14 mm,构件形式分为节点和杆件,钢结构总质量约555 t。
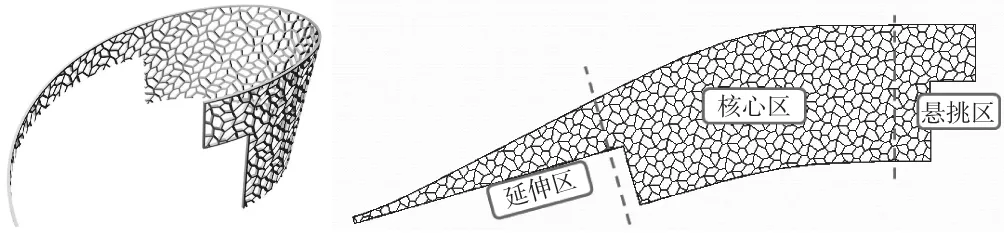
图2 “细胞壁”三维模型及展开示意
2 特点与难点分析
1)深化设计难度大。将结构分解为节点和杆件,结构节点和杆件众多,且节点与杆件均不相同。节点由3~6肢牛腿组成,节点牛腿轴线夹角各异,牛腿法线与节点法线夹角各异。利用以往的深化设计手段将每一个节点表述出来显然不现实,同时也难以准确地表现矩形杆交汇这种复杂的多维角度[1]。
2)节点制作难度大、精度要求高、检验困难。此类结构节点由3~6肢牛腿组成,由于是矩形杆汇交,存在空间多维角度。必须制定一套切实可行的加工制作工艺才能确保构件精度[2]。
3)现场安装难度大。由于结构为矩形杆件空间多杆交汇,结构在安装过程中,单个节点需与3~6根杆件精确定位,必须采用一套合理的施工工艺,满足钢网壳的安装精度,实现结构的复杂造型[3]。
3 无纸化深化设计技术
由于“细胞壁”式钢结构为多矩形杆空间交汇的异形网架,节点达900多个,杆件达1 300多根,且构件无一相同。采用常规的深化设计手段,无法准确地表达不同节点的空间尺寸和节点杆件间的相对关系,深化工作非常繁重,深化过程中极易出错且无法复核。基于新型的机器人加工技术,一种无纸化深化设计手段应运而生。无纸化深化设计技术是一种利用软件实现3D模型数据采集和处理,转换成机器人可识别的加工数据,最终实现机器人切割装配的技术。无纸化深化技术总体流程如下[4-6]:
1)确定“细胞壁”式钢结构单线模型,明确单线模型与玻璃幕墙、遮阳铝条面的相互关系及边界;
2)生成“细胞壁”式钢结构全三维实体模型,并由设计确认,作为深化设计依据,形成封样;
3)利用“多杆汇交瓣式网壳节点数据深化”软件提取实体模型加工数据。软件自动分析每根杆件的空间位置和截面方向,提取杆件牛腿截面控制点坐标及中心控制点坐标并转换成机器人可识别的加工数据;
4)采用了“正解”的方法,重新将数据进行各零件的三维建模。并通过计算机虚拟装配来复核数据的准确性。
4 机器人加工制作工艺
机器人加工制作工艺是利用5自由度混联机器人通过加工制作数据进行牛腿相贯线切割,并利用三维工装台进行节点组装,最终利用三坐标检测仪实现构件精度复核的成套工艺。
节点加工采用制作标准块、机器人加工相贯线、三维组装、数控加工的工艺,将几个独立的牛腿构造单元按设计定位角度与中心圆柱组合成焊接构件,如图3所示。

图3 相贯牛腿节点装配示意
机器人加工技术总体流程为:加工数据处理→标准杆件切割→牛腿相贯线切割→三维工装台装配→节点组焊接→节点热处理→节点机加工→三坐标检测→表面处理涂装→成品出厂。
5 “细胞壁”式钢结构安装工艺
“细胞壁”式钢结构总体安装施工路线采用利用结构自身刚度,自下而上逐环施工,节点杆件高空悬拼的方法。采用6015型塔吊分件散装,吊装构件主要为节点+杆件的组合构件,组合构件质量控制在1 t左右。
5.1 第1阶段施工
-16.10~±0.00 m间“细胞壁”结构施工。“细胞壁”分成4环(每环4 m),自下而上逐环施工,每环施工均自东向西进行(从“细胞壁”钢柱边界向混凝土柱边界)。利用结构环箍效应,形成自稳定体系。
5.2 第2阶段施工
±0.00~16.10 m间“细胞壁”结构施工。“细胞壁”分成4环(每环4 m),自下而上逐环施工,每环施工均自东向西进行(从“细胞壁”钢柱边界向混凝土柱边界)。利用结构环箍效应,形成自稳定体系。“细胞壁”延伸段的悬挑段分别采用1台250 kN汽车吊散装。
为了确保结构的安装精度,现场测量采用了全站仪坐标法进行构件的安装定位。构件控制点选用节点牛腿外表面中心坐标,控制点采用贴反射片的方法。
6 结语
上海自然博物馆“细胞壁”式钢结构工程项目采用无纸化深化设计技术,完成了复杂异形网架的建模和加工制作数据的采集;项目采用了机器人加工技术,实现了空间多杆交汇节点的加工制作,并采用了三坐标检测仪检测技术,大大提高了构件的制作精度。“细胞壁”式钢结构安装采用了无支撑高空悬拼施工工艺,利用结构自身刚度,自下而上逐环施工,通过全站仪三维坐标法,精确控制构件空间定位。
成套施工技术在“细胞壁”式钢结构工程的成功应用,对今后类似复杂异形网架结构的深化设计、制作、安装具有借鉴意义[7]。
猜你喜欢
四川建筑(2021年1期)2021-03-31
建筑机械化(2020年7期)2020-08-15
建筑施工(2020年4期)2020-08-07
安徽建筑(2019年4期)2019-05-09
上海公路(2018年4期)2018-03-21
浙江工业大学学报(2017年5期)2018-01-22
广东农业科学(2017年5期)2017-08-29
河南科技(2017年3期)2017-04-15
科技创新与品牌(2016年8期)2016-09-29
工程建设与设计(2016年1期)2016-02-27
