
某型潜艇航渡过程的动力系统优化应用研究
2015-09-12 07:50:02周建文孙俊忠周智勇
兵器装备工程学报 2015年4期
周建文,孙俊忠,周智勇
(海军潜艇学院,山东 青岛 266042)
现阶段常规潜艇在执行航渡任务时,一般采取水下和水上工况交替航行。在水下大深度、低速航行时潜艇隐蔽性非常好,而水上航行时,不仅要求潜艇的通气管暴露在水面上,而且柴发机组的运行极大地增加了潜艇的物理场,这就增大了被敌综合反潜体系探测到的几率。暴露率是指通气管(水面)航行状态的时间占总的航行时间的比值,在一定程度上反映了潜艇暴露的可能性。潜艇指挥员在执行航渡任务时需要充分考虑航渡区域各种因素的影响,合理的使用动力系统,以保证潜艇以尽量以小的暴露率完成任务。
1 航渡时动力系统的使用特点
潜艇要进行战斗活动,为了达到指定的战斗海域,首先要进行航渡。潜艇要进行航渡时,其基本要求是:按时到达指定作战海域,并保持最高的隐蔽性。因此,要依靠侦察与情报所获得的资料,如战区及航道上的气象条件、昼夜的长短、月亮的出没与盈亏情况、海水的比重与透明度、海深及海底情况(硬海底、液体海底)以及敌人防潜兵力与侦察器材布置情况等来确定动力装置的使用方法。
现代条件下,在一般的战术背景情况下,潜艇往往采用白天潜航航渡,夜间边航行边充电的方式航渡,称之为混合航行航渡。潜艇在水下以电机航渡是最隐蔽的方式,航行速度一般是用经济航速。此时水下续航距离最大,噪音最小。航行深度可根据敌人的反潜兵力、雷区情况及海水透明度而定,水下航行时,非必要情况,蓄电池容量不得低于一定的比值。
2 常规潜艇动力系统模型
2.1 蓄电池模型
常规潜艇蓄电池充放电过程是复杂的化学反应过程,影响其性能的因素众多。为了进行常规潜艇充电组织、动力系统使用方案优化需要对其蓄电池充放电性能进行建模。因为蓄电池充放电过程是通过化学反应实现的,充放电效果受很多因素的影响,很难使用原理分析的方法进行效能模型建立,因此通过对实验数据的分析建立模型用于进一步的分析是一种明智的选择[1]。
2.1.1 蓄电池充电模型
假定充电过程充电效果与蓄电池使用历史无关,则只要知道对于任意一个初始比重P0开始充电,整个充电过程中,电池比重随时间的变化函数[2]

充电效果模型实现的功能:计算从比重P1开始充电,经过时间t后的电池比重P2。图1是使用拟合的方法得到充电原函数曲线及反函数曲线。

图1 充电效果曲线
2.1.2 蓄电池放电模型
假设潜艇推进功率为潜艇航行速度的函数,常见的形式为[3-4]

其中:v潜艇航速;Q为功率。
如果已知初始电量W1,则可求出放电时间t后的剩余电量W2。通过对放电过程记录数据的分析,使用数据拟合的方法得到放电效果函数[5]Q(v),如图2所示。

图2 放电效果曲线
2.2 辅机模型
潜艇有上百台辅机,有些功率消耗很小;有些使用频率很低;有些功率虽小,但使用频繁、累积电量消耗较大;有些功率消耗大,使用时机随潜艇部署和季节环境变化。如要建立数学模型,考虑的随机因素比较多,没有规律可循。根据各种辅机的特点和潜艇上的实际情况,将辅机的消耗功率做如下分类[6]:
1)管制用电:只允许一类辅机运行,辅机严格限制;
2)节约用电:只允许一、二类辅机运行,空调不开;
3)正常用电:一、二、三类辅机全部正常允许,包括空调;
4)平均用电即为三类负载加权平均:20%的时间潜艇处于管制用电,即除必须开的辅机外,其余全部停;40%的时间潜艇处于节约用电状态,不包括空调;另外的40%时间,正常使用全部辅机,包括空调等[7]。
3 航渡过程动力系统优化算法
此优化算法是以动力系统模型为基础,并根据区域性质分隔航渡阶段,寻找符合贴合部队使用的动力系统优化方案[8]。
第1部分先进行基本参数分析与计算,其核心是选取蓄电池工况和充电时机,流程如图3所示。
第2部分是航渡决策,其核心是根据航渡要求,合理安排和规划蓄电池航行、充电航行,使之符合约束条件要求,形成动力系统使用方案,决策流程如图4所示。
第3部分是方案的调整与优化,其核心时计算和仿真动力系统方案,对不符合约束部分进行调整,对整体性能参数进行优化,优化调整流程如图5所示。
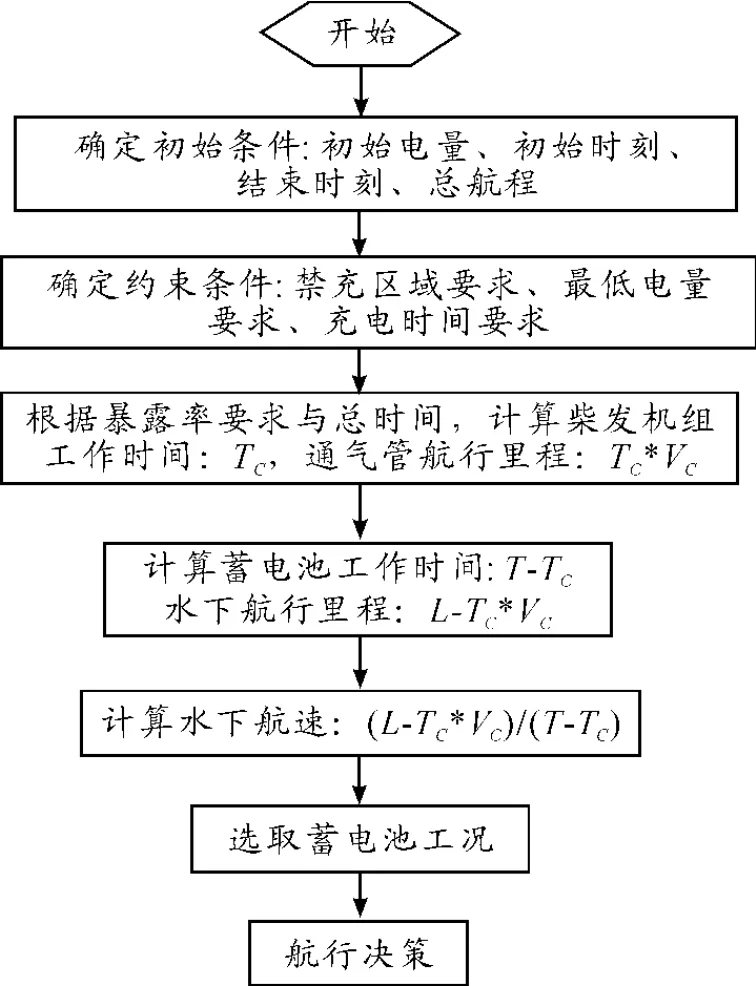
图3 概要计算流程

图4 航渡决策流程

图5 方案的调整与优化
4 仿真分析
设定好航行时间、航程和暴露率,利用动力系统优化算法对动力系统使用方案进行计算机决策,形成动力系统使用方案如表1所示。在动力系统模型的支持下,对形成的方案进行仿真,仿真结果与实艇远航结果进行比较,如表2所示,误差在允许范围内。
5 结论
航渡过程的动力系统优化的实质是对计算量与优化结果进行折中,得到的结果并不是数学意义的最优,最多是次优解。但它计算量小,决策时间短,符合部队使用习惯,适合实艇使用。

表1 动力系统使用方案

表2 动力系统使用方案仿真结果表
[1]许建.常规潜艇动力系统建模与仿真[J].华中理工大学学报,1998(12):42-44.
[2]马守军,庄亚平,陈新传.潜艇蓄电池建模策略分析[J].船电技术,2004(4):23.
[3]王斯成.蓄电池剩余电量(SOC)数学模型探讨[J].太阳能学报,2005(2):19-20.
[4]赵兴福.电动汽车蓄电池的建模与仿真[J].武汉理工大学学报,2004(2):33-35.
[5]周开利,康耀红.神经网络模型及其MATLAB仿真程序设计[M].北京:清华大学出版社,2005:220-228.
[6]路红山,许建,张京伟,等.潜艇动力系统任务维修性建模[J].中国舰船研究,2008(4):34.
[7]许建.潜艇蓄电池放电过程的仿真研究[J].电源技术,1998(2):46-47.
[8]周智勇,孙俊忠,龚文超.潜艇航渡过程的动力系统辅助决策研究[J].指挥控制与仿真,2013(2):43-44.
猜你喜欢
新能源汽车供能技术(2021年1期)2021-10-14 08:59:48
电站辅机(2021年4期)2021-03-29 01:17:00
有色设备(2021年4期)2021-03-16 05:42:30
电子制作(2019年23期)2019-02-23 13:21:36
中国交通信息化(2017年11期)2017-06-06 07:25:48
山东工业技术(2016年15期)2016-12-01 05:31:28
西藏科技(2016年5期)2016-09-26 12:16:43
通信电源技术(2016年5期)2016-03-22 01:09:48
铜业工程(2015年4期)2015-12-29 02:48:35
电源技术(2015年5期)2015-08-22 11:18:02
