
Tripod机器人的视觉处理应用研究
2015-08-31 02:45:52武文杰石红瑞
石油化工自动化 2015年4期
武文杰,石红瑞
(东华大学 信息科学与技术学院,上海201620)
机器人作为应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用日趋重要,搬运机器人作为最早应用于生产的两种工业机器人之一,在工业生产自动化中一直扮演着非常重要的角色。目前生产线上应用的搬运工业机器人大多是通过示教再现或预编程来实现机器人的操作,物体的初始位姿和终止位姿都是严格限定的,机器人只是完成点到点的任务动作,对于外部参数变化的物体搬运操作则显得无能为力[1]。在这种情况下,为保证机器人顺利高效地完成工作任务和减少生产准备时间,引入机器视觉技术来实现对工作目标物体的识别和定位就显得尤为重要[2]。
在现代自动化生产过程中,计算机视觉技术正成为一种保证产品质量和提高生产效率的关键技术手段,如实现智能机器人的控制、对机械零件的自动加工和检测及柔性生产线的自动监控等[3]。本文针对生产线上的工业机器人控制系统进行开发设计,将计算机视觉技术应用于搬运工业机器人的工作领域,利用机器视觉技术获取工件及其周围环境的信息,从中识别出目标物体,并做出决策来引导工业机器人完成对目标物体的抓取、放置等操作。该实验使用的设备为Tripod机器人,即通常所说的Delta机器人,在包装机械等拾取动作方面有很大应用。该机器人的整体机械部分和控制系统、运动控制系统及软件平台均由B&R提供,如图1所示。
1 图像采集与透视变换
采集图像时,需要安装摄像头对工作平台进行拍照。本文所研究的”Pick&Place”平台主要由三部分组成:内圆、外环和三种几何体(三角、圆形、星形各3个)。选取合适的角度对当前操作平台的摆放状态进行拍摄,获取工作平台的侧拍图。
侧拍得到的图片由于图像畸变,因而需要变换操作,方便后续处理,在此,笔者采用透视变换技术[4]。透视变换是将图片投影到一个新的视平面,也称作投影映射。通过在平台合适位置标定正方形的4个点,构造相应的变换矩阵,实现四边形到正方形的变换,进而完成畸变图形的矫正[5],原理如图2所示,实验结果如图3所示。
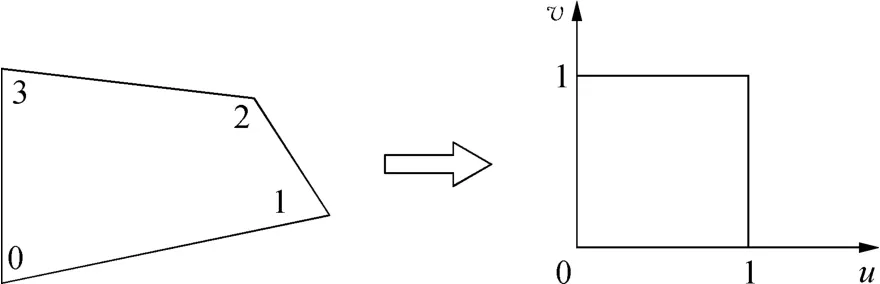
图2 投影变换原理示意
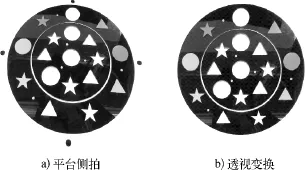
图3 图像采集
2 预处理及边缘轮廓的提取
若要提取目标图像轮廓,就必须将采集到的彩色图片进行预处理,通过灰度化、高斯滤波、二值化,去除图像中的噪声、光照影响,处理结果如图4所示。灰度图像的描述同样反映了图像整体和局部的色度及亮度等级的分布和特征。高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程,高斯滤波在滤去噪声的同时能更好地保护图像边缘信息[6]。对图像进行二值化处理,是为了在尽量保留原图特征的前提下去掉冗余信息。一方面可以减少存储空间、提高处理速度;另一方面可以更容易获得平台图像的位置和大小等几何特征信息。
边缘的一个特性是在目标图像轮廓交界处像素变化较为平滑,而在垂直于边缘点切线的方向上像素变化梯度较大。Canny边缘检测先求x和y方向上的一阶导数,进而组合成4个方向的导数,由局部最大值确定边缘候选点,再通过阈值法得到物体边缘的最优检测,所得的边缘较为平滑且定位精度高[7]。
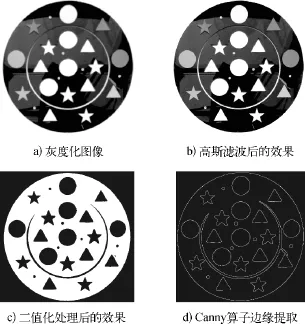
图4 预处理及边缘轮廓的提取
3 几何体形状检测及定位
3.1 Hough变换检测圆形几何体
Hough圆检测的核心思想:垂直于圆边界点的垂线最终会通过圆心。因此,如果沿圆的边缘画出每个边界点的垂线,就会在圆心上得到一个“亮点”,即众多垂线重叠最严重的地方。在坐标平面上确定一个圆需要3个参数——圆的半径、圆心的x轴坐标和y轴坐标,因而圆的Hough变换是一个以圆的半径和圆心坐标为参数的三维空间。
本文采用快速Hough圆检测方法。首先,采用基于(a,b)空间累加的圆心检测算法,完成圆心的定位;然后,采用基于r空间累加的半径计算方法,计算圆的半径[8]。
利用OpenCV中Hough变换检测圆的函数cvHoughCircles,采用快速Hough圆检测以及设置函数中圆的半径参数,就可以对图像中的小圆进行检测。
利用Hough函数检测圆形几何体的结果如图5所示。可以看到,Hough变换检测得到的圆心并不准确,存在一定的偏差。

图5 Hough变换检测圆的结果
根据粗定位得到的6个圆心坐标,依次从原图中截取ROI,ROI是一个长宽为检测圆直径2倍的正方形,如图6所示。利用上一节所提到的方法进行精定位,最终可以得到精确定位后的平台中心点坐标。
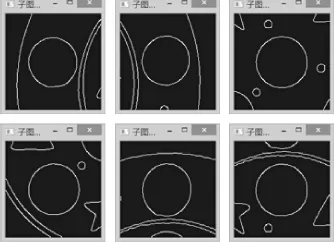
图6 根据粗定位坐标点提取的ROI区域
图6中,平台内环的3个圆孔是外环圆形几何体放置的地方。Hough变换检测圆,并不能区分是外环圆形几何体还是内圆圆形的孔位。所以,需要通过计算圆心与平台中心点的距离将两者区分开来。得到距离数组后,用函数sort()对距离进行从小到大排序,数组中的前3个即是内环的圆形孔位,后3个即是外环的圆形几何体。
3.2 检测三角形和五角星几何体
得到内环圆形孔位和外环圆形几何体的中心点坐标后,由于其他孔位也是均匀分布在圆形平台上,可以通过坐标旋转的方法,初步得到三角形和星形孔位及几何体的中心点坐标。
ROI范围的确定:以粗定位的中心坐标为原点,向上下左右四个方向延伸0.6倍的外接圆直径距离。若触碰到图像边界,则选取图像边界为ROI的边界[9]。
对中心点的像素值RGB进行采样,以该点的颜色向量作为前景颜色的参考标准。设定分割的阈值为50,采用距离分类器,距离采用欧式距离。对距离小于50的像素点认为是前景,设定为白色;反之则设定为黑色。
目标物边缘的提取采用Canny算子,进行边缘检测,结果如图7所示。
因为几何体都是中心对称的,所以可以采用求物体边缘像素点平均的方法,来对几何体进行精确定位。
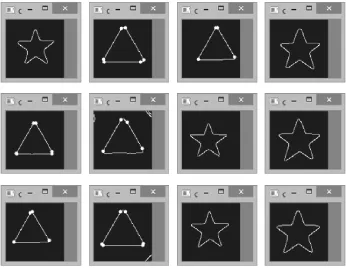
图7 根据粗定位坐标点提取的ROI区域边缘检测结果
采用OpenCV中cvHoughLines2函数来检测线段[10]。设置param1为外接圆的半径(R=检测圆直径/2.0),即最短线段的长度。根据这个阈值,可以用来区分三角形和五角星。如图8所示,三角形的边长大于R,星形的边长小于R。
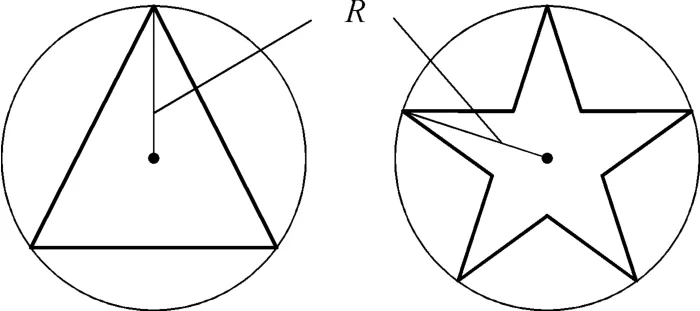
图8 三角形和星形的外接圆示意
笔者认为检测到两条及以上长度大于R的线段,则认为该几何体为三角形,否则认为它为星形。根据该判断准则,可以将两者进行区分。
4 几何体的颜色识别及旋转角度计算
4.1 颜色识别
提取几何体的精定位中心点相应的RGB分量值,判断每个点三分量数值,运用OpenCV中cvMat函数确定其颜色。RGB三分量值构成三维数组,橙色R分量值较高,蓝色B分量值较高,黄色R和G分量值较高,由此便实现了几何体颜色的划分。
4.2 旋转角度计算
三种形状的几何体中,圆形是不需要调整角度的。对于三角形和星形,选取其最高点,过最高点和中心点做一条线段,该线段与坐标系中y轴的夹角即为旋转角度值。如图9所示,夹角t即为所需旋转的角度值。
根据上述原理,首先确定各几何体的ROI范围,然后进行图像分割和边缘检测,得出图形轮廓后计算旋转角度,若顺时针旋转为正值,逆时针旋转则为负值。
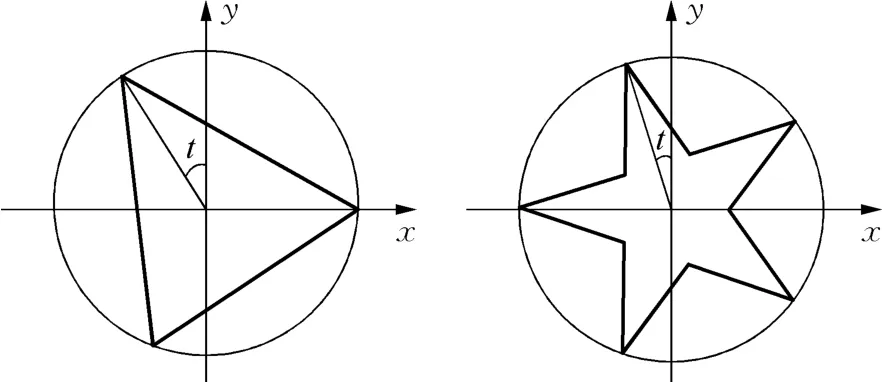
图9 三角形和星形的旋转角度选取原理
5 结束语
通过实验研究表明,笔者针对Tripod机器人设计的图像处理技术能够有效地实现物体形状与颜色的识别,位置与角度的定位,这不但提高了产品的质量和生产效率,同时对增强工业机器人对环境的适应能力以及拓展机器人应用范围都具有十分重要的意义。
[1]毕胜.国内外工业机器人的发展现状[J].机械工程师,2008(07):5-7.
[2]谢中壵.未来两年全球工业机器人产业发展预测研究[C]//先进制造与数据共享国际研讨会论文集.北京,2007.
[3]黄文清,汪亚明,周志宇.计算机视觉技术在工业领域中的应用[J].浙江工程学院学报,2002,19(02):92-96.
[4]CHAUMETTE F,MALIS E.2D1/2Visual Servoing:A Possible Solution to Improve Image-based and Position-based Visual Servoings [C]//IEEE International Conference on Robotics and Automation.San Francisco,2000:630-635.
[5]HARTLEY R,ZISSERMAN A.Multiple View Geometry in Computer Vision [M].Cambridge: Cambridge University Press,2004.
[6]李惠芬,蒋向前,李柱.高斯滤波稳健性能的研究与改进[J].仪器仪表学报,2004,25(05):633-637.
[7]陈若珠,薛彪.基于Matlab的改进Canny算子的图像边缘检测研究[J].工业仪表与自动化装置,2014(04):113-116.
[8]BRADSKI G,KAEHLER A.学习OpenCV [M].于仕琪,刘瑞祯,译.北京:清华大学出版社,2009.
[9]张铮,王艳萍,薛桂香.数字图像处理与机器视觉[M].北京:人民邮电出版社,2010.
[10]LAGANIERE R.OpenCV2计算机视觉编程手册[M].张静,译.北京:科学出版社,2013.
猜你喜欢
福建中学数学(2023年5期)2024-01-25 17:41:36
传染病信息(2022年2期)2022-07-15 08:55:02
电脑报(2020年12期)2020-06-30 19:56:42
电脑报(2019年4期)2019-09-10 07:22:44
数学物理学报(2019年3期)2019-07-23 01:15:36
中等数学(2018年1期)2018-08-01 06:41:04
少儿美术·书法版(2016年1期)2016-02-06 00:59:39
大众摄影(2015年9期)2015-09-06 17:05:41
东北师大学报(自然科学版)(2014年1期)2014-02-27 08:02:07
东北石油大学学报(2013年6期)2013-03-11 15:35:37
