
基于模糊PID控制的变频调速恒压供水系统
2015-08-25 01:31:56唐莎
机电工程技术 2015年1期
唐 莎
(清远市技师学院,广东清远511517)
基于模糊PID控制的变频调速恒压供水系统
唐莎
(清远市技师学院,广东清远511517)
介绍一种模糊控制和PID相结合的方法控制恒压供水,在压力波动较大时使用模糊控制,以加快响应速度,在压力范围较小时采用PID来保持静态精度。
流量;压力;Fuzzy控制;PID控制
DOI:10.3969/j.issn.1009-9492.2015.01.027
近年来,基于PID和PLC的变频调速恒压供水技术得到广泛应用,被认为是一种理想的供水方式,但恒压供水系统的特点是非线性、大惯性,仅使用基于PID控制的变频调速供水时,存在不同程度的超调或震荡现象,基于此本文提出了一种基于模糊控制和PID相结合的方法。
1 恒压供水系统控制对象
恒压供水系统最根本的控制对象是流量,在实际生活中,不同季节、不同时间用水流量是变化的,难以具体测量,考虑到在动态情况下,管道中水压的大小与供水能力(由供水流量Qc表示)和用水需求(由用水流量Qu表示)之间的平衡情况有关。若供水能力Qc>用水需求Qu,则压力上升;若供水能力Qc<用水需求Qu,则压力下降;若供水能力Qc=用水需求Qu,则压力不变。由此可见,供水能力与用水需求之间的矛盾具体反映在压力的变化上,从而压力就成为用来控制流量大小的参变量。
2 恒压供水系统组成和工作原理
恒压供水系统由PLC、变频器、压力变送器、接触器组和水泵机组等组成,如图1所示,本系统具备同时控制两台水泵的功能,根据不同场合需求,可以采取两台水泵同时运行,一台水泵运行一台备用,定时换泵等多种工作方式。
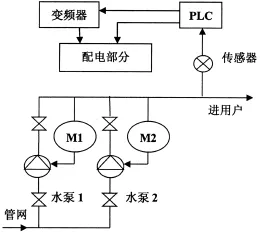
图1 恒压供水系统组成
恒压供水系统工作原理为:压力传感器周期性的采集管网压力,并将管网压力传送给PLC进行信号处理、模糊算法运算控制等,其结果作为变频器的总给定,用以改变供水流量和压力控制。具体来说,当供水压力小于给定压力时,变频器输出频率升高,电机转速加快,供水压力升高;反之变频器频率降低,电机转速减小,供水压力降低,如此多次调整,直到偏差为零,保持供水压力恒定[1-5]。
3 控制器的设计
在恒压供水系统中,供水压力是通过变频器的输出频率控制来实现的,确定供水压力和输出频率的关系式设计控制策略的基础,供水系统一般用户较多且用水时间不确定,管网水压波动较大,难以建立精确的数学模型,而模糊控制直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,不需要建立被控对象的精确数学模型。本系统采用模糊—PID控制,其控制模型如图2所示。
控制策略选择的基本原则是:PLC通过采样获取用户管网水压的精确值,然后将次量与给定值比较得到误差信号e,根据误差信号e,在大误差范围内,采用Fuzzy控制,以提高动态响应速度,增强自适应能力,在小误差范围内,采用PID控制,以提高动态响应速度,增强自适应能力消除静态误差,提高控制精度。
3.1 Fuzzy控制
一般的模糊控制系统中,通常采用二维模糊控制器结构形式,选取系统误差信号压力差e和误差变化率Δe为输入语句变量,输出变量为控制变频器给定频率值U,本系统采用7个模糊集合描述水压的误差e、误差变化率Δe和控制量U,分别为PB(正大)、PM(正中)、PS(正小)、ZE(零)、NS(负小)、NM(负中)、NB(负大),其输入变量模糊隶属函数在相应的论域为[+6,+5,+4,+3,+2,+1, 0,-1,-2,-3,-4,-5,-6]表示如图3,针对变频器最多提供15段速,可设置15个频率值,选取输出变量U论域范围为[+7,+6,+5,+4,+3,+2,+1,0,-1,-2,-3,-4,-5,-6,-7]共15个值与之对应,其相应的隶属函数表示如图4。
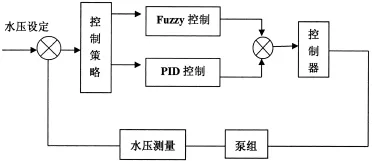
图2 模糊—PID控制

图3 误差e、误差变化率Δe模糊隶属函数
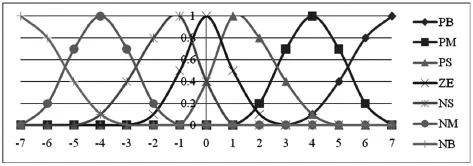
图4 输出变量隶属函数
控制规则用语言描述如下:若压力低于给定值则提高变频器输出频率,低得越多,频率提得越多;若压力高于给定值,则变频器输出频率降,高得越多降得越多,具体来说采用IF E and Ec then U,根据规则算出总的模糊关系R。为便于控制,事先对各种误差和误差变化,根据模糊关系R按隶属度最大原则计算出相应的控制表如图5所示。在实时压力控制过程中,上述控制表存在PLC内存中,PLC的输入端口接收管网中的压力值,并与给定值进行比较,计算误差e及误差变化率Δe,乘以相应的量化因子,并经取整处理变换成模糊变量E、Ec通过查找控制表得到控制量U,如图5所示。
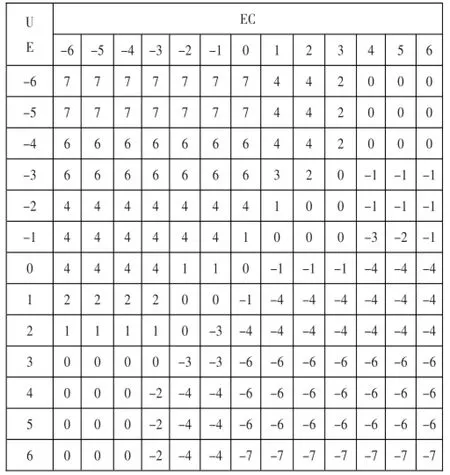
图5 控制表
3.2 PID控制
通过变频实现PID控制有两种:一是变频器内置PID控制功能,给定信号通过变频器的端子输入,反馈信号也反馈给变频器的控制端,在变频器内部进行PID调节以改变输出频率;二是外部的PID调节器将给定量与反馈量比较后输出给变频器加到控制端子作为控制信号,本系统采用第二种控制方式。PID控制器由比例单元(P)、积分单元(I)、微分单元(D)组成,其输入e(t)和输出u(t)的关系,其中Kp为比例系数,Ti为积分时间常数,Td为微分时间常数,使用中只需设定三个常数Kp、Ti、Td。PID控制器中对这三个参数整定的方法很多,目前使用广泛的有三种,分别为试凑法、经验数据法、扩充临界比例度法,在本设计中采用试凑法,即先调节比例控制系数,直至得到反应快、超调小的响应曲线,然后整定积分控制参数,直至系统在保持良好动态性能的情况下,静态得到消除,最后整定微分控制参数,直至得到满意系统响应,根据这一系列原则,选取Kp=0.3、Ti= 10 s、Td=3 s。
4 结论
利用学校自动化实操室提供的由三向公司制作的“恒压供水系统实验装置”对模糊—PID控制算法进行实验,发现先对于常规PID控制来说,模糊控制PID控制存在响应时间短,更快的反应速度,并且超调小,这表明对于恒压供水系统,采用模糊PID控制可以取得更好的性能,实现对控制系统的快速、准确控制;但也存在着不足,PID控制器和模糊控制器各自分别设计完成,根据一定判断决定哪一个控制器的输出才是系统真正的控制值,难点是如何选择切换条件保持系统平稳切换。
[1]张立辉.模糊控制变频调速恒压供水系统的研究设计[D].长春:吉林大学,2007.
[2]高宏岩.基于PLC的模糊控制恒压供水系统设计[J].中国农村水利水电,2007(4):48-49.
[3]袁佑新,陈继伟,黄晓新,等.基于模糊控制的恒压供水控制系统设计[J].中国水运,2007(7):28-29.
[4]李海波.基于PLC的智能变频恒压供水监控系统的设计[J].机电工程技术,2011(3):48-50.
[5]曹承志,王楠.智能技术[M].北京:清华大学出版社,2004.
(编辑:向飞)
Variable Frequency Speed Constant Pressure Water Supply System Based on Fuzzy PID Control
TANG Sha
(Qingyuan Technician College,Qingyuan511517,China)
This paper introduces the control constant pressure water supply a method of combination of fuzzy control and PID,the use of fuzzy control in the pressure fluctuations,to accelerate the response speed,using PID in the pressure range is small to maintain static accuracy.
flow;pressure;fuzzy control;PID control
TP29
A
1009-9492(2015)01-0098-03
2014-07-15
唐莎,女,1983年生,湖南郴州人,大学本科,讲师。研究领域:自动化。已发表论文3篇。
猜你喜欢
装备制造技术(2021年2期)2021-07-21 05:38:56
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
设备管理与维修(2016年7期)2016-04-23 06:51:55
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
自动化博览(2014年4期)2014-02-28 22:31:12
河南科技(2014年23期)2014-02-27 14:18:59
河南科技(2014年11期)2014-02-27 14:09:59
河南科技(2014年3期)2014-02-27 14:05:52
