
一种长短轴半径无级可调的椭圆规研制*
2015-08-25 01:31:38黄长征徐卓伟杨伟为孔子豪
机电工程技术 2015年1期
黄长征,徐卓伟,杨伟为,孔子豪
(韶关学院物理与机电工程学院,广东韶关512005)
一种长短轴半径无级可调的椭圆规研制*
黄长征,徐卓伟,杨伟为,孔子豪
(韶关学院物理与机电工程学院,广东韶关512005)
目前的椭圆规结构复杂,长短轴长度调整及携带很不方便。基于一椭圆参数方程,研制了基于锥齿轮传动的长短轴半径无级可调的椭圆规。实际应用表明,该仪器结构简单,便于携带,操作方便,长短轴半径无级可调,可绘制不同尺寸的椭圆。
椭圆规;无级调节;长短轴半径
DOI:10.3969/j.issn.1009-9492.2015.01.005
现有绘制椭圆的方法有很多,常用的有描点法、尺规作图法等。但这些方法绘制的椭圆不是标准的椭圆并且绘制的操作过程复杂。而目前专门绘制椭圆的工具——椭圆规也有很多种,如:板式椭圆规[1]、“两线三级”椭圆规[2]、十字滑块椭圆规[3]、行星式椭圆规[4]、摆臂式椭圆规[5]、改制椭圆规[6]、连杆滑块式椭圆规[7-8]等。但它们大多结构复杂,操作、携带不便,不能无级调节长短轴半径。目前还未见一种既可无级调节又简单方便的椭圆规应用于实际生产生活当中。所以采用锥齿轮传动及滑块机构研制出一种长短轴半径无级可调的椭圆规。下面介绍该装置的设计原理、结构及其特点。
1 设计原理
如图1所示,以O点为坐标原点建立直角坐标系。设OA1=(a+b)/2,A1B=(a-b)/2,其中a、b分别为长轴、短轴的半径。A1B绕A1点顺时针旋转过2θ角,得到线段A1B1,延长A1B1,构建等腰三角形△OAA1。则

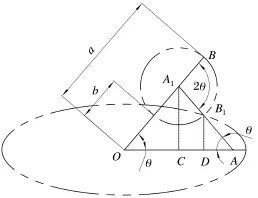
图1 设计原理图
则点B1的纵坐标

而

则

则B1横坐标为

所以B1的坐标为(acosθ,bsinθ),即

式(5)即为一椭圆的参数方程,也就是说B1的运动轨迹即为一椭圆。
2 原理实现
2.1椭圆的绘制实现
该椭圆规的结构示意图如图2所示,主要由转臂1、画笔11、回转轴8、锥齿轮1、锥齿轮2、锥齿轮3、锥齿轮4、横轴12组成;锥齿轮1固定在主轴上保持不动,用力拨动转臂,使转臂做圆周运动,同时锥齿轮1、2的啮合使回转轴旋转,然后通过锥齿轮3、4的啮合传动,使画笔随着横轴12绕着转轴10旋转;整个机构通过两对锥齿轮的啮合传动,使得转臂和画笔回转方向相反,并且使OA1旋转θ角时,A1B旋转2θ角,即∠A1OA=∠OAA1=θ时,∠BA1A=2θ,从而使B1的轨迹即为一椭圆,实现椭圆的绘制。
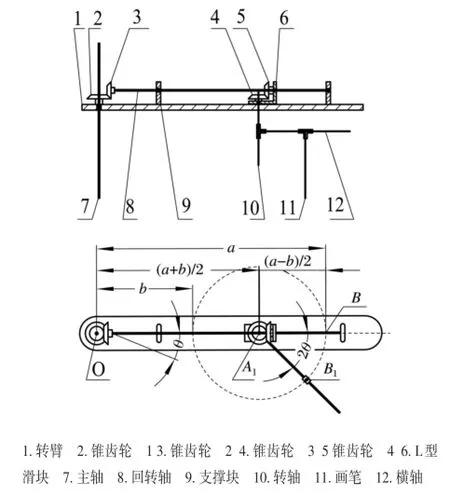
图2 椭圆规结构示意图
为实现∠A1OA=∠OAA1=θ时,∠BA1A=2θ,则齿轮传动系统的总传动比为0.5。设锥齿轮1、齿轮2、齿轮3、齿轮4的齿数分别为Z1、Z2、Z3、Z4,则锥齿轮1、齿轮2的传动比为i1=Z2/Z1=0.5,锥齿轮3、齿轮4的传动比为i2=Z4/Z3=1,总的传动比i为0.5。因此画笔11的转速是转臂1的2倍,即转臂转θ角时,画笔转2θ角,从而使B1的轨迹即为一椭圆。
2.2长短轴半径无级可调实现
长短轴半径如图2所示,a=OB,b=OA1-A1B,OA1=(a+b)/2,A1B=(a-b)/2。转臂上标有刻度,可以通过移动L型滑块来改变OA1的长度以无级改变长轴半径a,由锁紧螺钉锁紧固定。横轴上标也有刻度,通过移动L型滑块来改变A1B的长度以无级改变短轴半径b,由锁紧螺钉锁紧固定。因为转臂旋转1周时,画笔旋转2周,所以画椭圆时,转臂和画笔有4次位于同一铅平面,此时,笔尖分别位于长短轴的四个端点。因此,只需拨动转臂旋转一周,即可完成一个标准椭圆的绘制。
3 工程实例
某长短轴半径无级可调的椭圆规计算实例如表1所示。
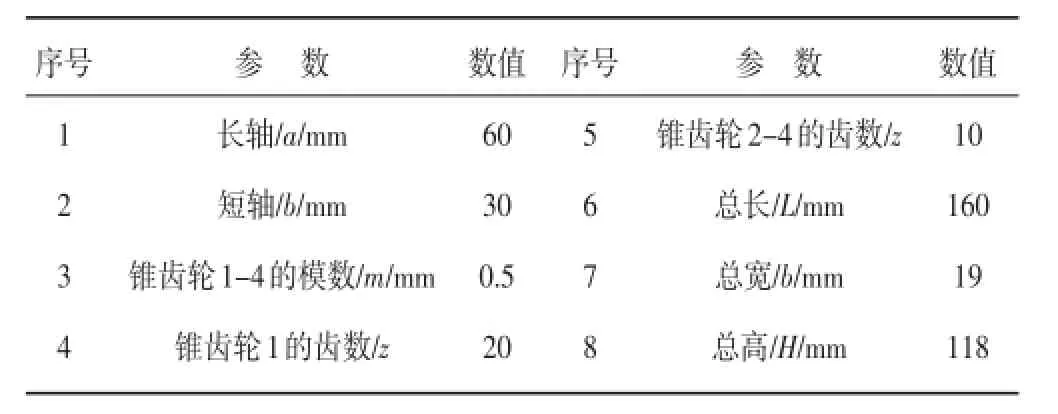
表1 R某长短轴半径无级可调的椭圆规主要参数
4 结束语
实际应用表明,该椭圆规设计合理,结构简单,携带方便,操作简便,长短轴半径无级可调,可绘制不同要求的椭圆,可广泛应用于工程或学习实际,应用前景广阔。
[1]张楠,张健.椭圆规[J].发明与创新,2012(04):30.
[2]谷华峰.一种椭圆规[P].中国:CN201110342379.0,2011-11-03.
[3]何青洋.椭圆规机构的设计与制作[D].南阳:南阳理工学院,2011.
[4]林育辉.椭圆规装置[P].中国:CN200720125367.1,2007-08-15.
[5]官蔚宇.摆臂式椭圆规[P].中国:200510033831,2005-04-03.
[6]胡勇.椭圆规(样品)研制报告[J].河南教育学院学报:自然科学版,1999(03):22-23.
[7]杜密科,刘淑先.两种椭圆规机构的设计及原理[J].机械工程师,1995(04):18-19.
[8]廖林清,李恩科,王伟,等.汽车左右转向理论特性线和转向理想椭圆的研究[J].机械设计,2014,31(1):16-20.
(编辑:阮毅)
A Kind of Ellipsograph Which's Long and Short Shaft's Radius' Length can be Ajusted Steplessly
HUANG Chang-zheng,XU Zhuo-wei,YANG Wei-wei,KONG Zi-hao
(School of Physics and Mechanical&Electrical Engineering,Shaoguan University,Shaoguan512005,China)
The structure of current ellipsographs is complicated,and it is difficult to adjust the length of long and short shaft's radius and inconvenient to carry.A new kind of ellipsograph developed based on a parametric equation of ellipse.The ellipsograph's dirive system is composed of the bevel gears,and its length of long and short shaft's radius are steplessly adjustable.The actual practice shows that the structure of the ellipsograph is simple,and it is portable and convenient.The length of long and shot shaft's radius can be steplessly ajusted.So the different size of ellipse can be drawn by it.
ellipsograph;steplessly ajusted;length of long and short shaft's radius
TH122
A
1009-9492(2015)01-0021-02
*广东省科技计划项目(编号:2012B091100199)
2014-07-30
黄长征,男,1970年生,湖南耒阳人,博士,教授。研究领域:机电液集成控制理论与技术应用。
猜你喜欢
机械设计与制造(2021年7期)2021-07-26 03:11:34
轮胎工业(2020年2期)2020-03-01 23:46:46
山东冶金(2018年5期)2018-11-22 05:12:22
制造技术与机床(2017年3期)2017-06-23 08:11:38
潍坊学院学报(2017年2期)2017-04-20 08:44:17
光学精密工程(2016年6期)2016-11-07 09:08:06
装备环境工程(2015年5期)2015-02-28 01:20:38
装备环境工程(2015年5期)2015-02-28 01:20:34
装备环境工程(2015年5期)2015-02-28 01:20:27
湖南大学学报·自然科学版(2014年2期)2014-12-25 14:06:15
