
集成传感器射流清洁的水产养殖环境监测系统设计
2015-08-20 17:50单慧勇刘中一田云臣
江苏农业科学 2015年7期
单慧勇 刘中一 田云臣

摘要:在水产养殖监控系统中,水质在线监测传感器长时间在水中工作容易附着各种杂质,影响水质因子数据采集的准确性。设计了集成传感器射流清洁功能的水产养殖环境监测系统,采用可编程逻辑控制器(PLC)作为下位机主控制器,设计内部集成传感器射流清洗系统的不锈钢水质采样箱,由PLC完成水质参数的数据采集及测试水泵、清洗水泵等设备的实时协调控制;上位机选用监视与控制通用系统(MCGS)触摸屏,实现系统状态的实时监控。
关键词:水产养殖监控;传感器清洗装置;PLC
中图分类号: TP274+.2 文献标志码: A 文章编号:1002-1302(2015)07-0429-02
影响水产养殖环境的水环境因子主要包括溶解氧、氨氮、硫化物、pH值(酸碱度)等,目前我国市面上成套的水产养殖设备多数是以PC机或单片机作为核心处理控制器,完成对水位、溶解氧、温度、pH值等水环境因子的监测控制[1-3]。水质监控设备经长时间使用后,水中的污杂物、微生物附着在传感器探头上,导致采集到的水质因子数据偏离实际,设备产生误动作。常见的水产养殖监控设备中,设计者很少考虑传感器自动维护保养,目前多采用人工定期清洁维护方法。笔者设计出水产养殖环境监测系统,采用工业生产控制中常用的PLC作为核心处理控制器,实现水质传感器采样及传感器定期自动清洁,以期延长传感器使用寿命。
1 系统总体设计方案
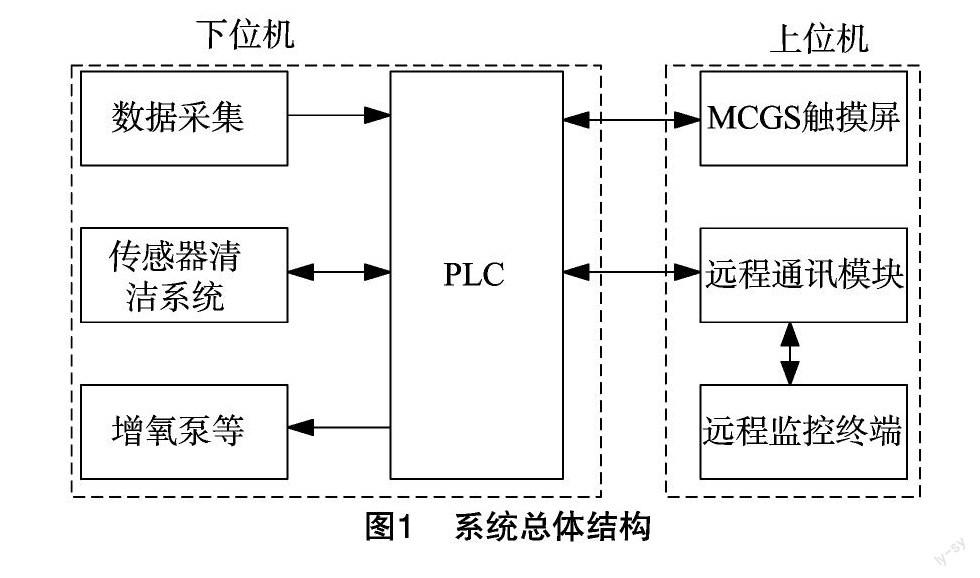
本系统分为上位机与下位机2个部分,下位机采用可编程逻辑控制器(PLC)控制,主要完成对采样泵、增氧泵、传感器清洁装置及其他设备的控制以及水环境因子数据采集,通过PLC的A/D模块对传感器输出的模拟量进行采集,并且由PLC控制传感器清洁装置、增氧泵、水泵等装置启停。系统中上位机包括监视与控制通用系統(MCGS)触摸屏、远程监控终端,触摸屏作为现场人机接口,控制系统状态,实现传感器数据的采集显示、储存、历史信息统计等,远程通讯模块将现场系统状态数据传输到远程监控终端,实现现场的远程监控(图1)。
2 系统硬件设计
2.1 电气控制柜设计
系统电气控制柜(简称电控柜)为具有短路保护、漏电保护、过载保护、欠压保护等电气保护功能的电气装置。电控柜采用功能分区域方式设计布置,便于维护元器件。系统主机选用三菱FX2N-48MR-001及FX2N-4AD扩展模块。该型号PLC共有48点输入输出,输入类型为直流24 V输入,输出类型为继电器输出型,FX2N-4AD扩展模块具有4组模拟量信号采集输入端,可同时采集4路模拟量。触摸屏选用TPC1062K(北京昆仑通态自动化科技有限公司)。
2.2 传感器选型
考虑到实用性与价格等多方面因素,本系统选用DO-8100型溶解氧测试仪及PH-210型PH/ORP测试仪,这2个仪表具有4~20 mA模拟量信号输出,也可通过RS 485读取数据。
2.3 传感器清洁装置设计
2.3.1 清洁系统方案 水质采样箱采用不锈钢材质,采样箱内部集成传感器射流清洁系统,采用射流方式清洁传感器探头可避免毛刷或其他方式清洗时夹带杂物对传感器探头造成损坏。
采样箱在结构设计上采用双层结构,第1层为支架、导管、清洗器件安装层,用来安放传感器旋转清洁喷头及液位开关支架;第2层为传感器安装板,用来安装传感器(图2)。喷头布局为正三角形,即传感器位于正三角形中心,既节约空间又能保证清洁效果。为提高清洗力,采用多个喷头循环工作的方案。图2中A、B、C为液位开关,液位开关A为传感器清洗上限水位及水环境因子开始采集状态标志位;液位开关B为水环境因子采集时液位控制标志位及清洗时清洗液位超限标志位;液位开关C为清洗液位超限报警标志,当开关C动作时,表明采样箱液位过高,系统报警。采样箱外部水路设置有测试进水口,测试进水口与多个采样点的采样水泵通过电磁阀连接,各清洗喷头进水口、采样箱排水口分别由电磁阀进行控制,结合PLC实现采样箱工作状态的切换控制。
2.3.2 清洗力计算
水射流作用于物体表面,其原有速度、方向均发生改变,即动量发生变化,这种动量的变化是由于水射流与物体间的相互作用引起的,依据动量定理,可以得到喷头清洗时的理论射流打击力公式如下[4]:
F=0.745×q×psin。(1)
式中:F为理论最大射流打击力,N;q为射流体积流量,L/min;p为工作压强,MPa;为射流清洗角度。
清洗器件由喷头、导管组成,喷头产生射流的冲洗流量与喷嘴的直径及喷嘴个数有关,喷头流量一定时,喷头数量越多,产生压强越小。喷嘴出口直径设计时往往须要使设计的喷嘴达到泵的额定流量与额定压力,喷嘴直径与系统压力、流量的关系如公式(2)所示[5]:
d=0.69qμp。(2)
式中:d为当量喷嘴直径,mm;q为射流体积流量,L/min;p为射流压力,MPa; μ为喷嘴流量系数,一般可取0.9。
本系统选择高压大功率洗车泵,额定功率130 W,吸程 3~5 m,额定出口压力0.5 MPa,额定流量15 L/min,最大出口压力控制在1.3 MPa,不计沿程压力损失。由上述分析可知,当选择有效直径3.2 mm的单喷嘴时,泵近似工作在额定状态,此时理论最大射流清洗力8 N左右。考虑到管路损失、射流靶距等因素,实际产生的清洗力将减小,但由于采用定时清洁的方案,提高了清洁频率,传感器表面附着较少,所需清洁力较小。实验室测试结果表明,本系统可以减少传感器表面附着,维持传感器清洁。
3 系统软件设计
本系统在软件编程上分为上位机程序与下位机程序2个部分,下位机程序主要为三菱PLC程序,上位机程序为MCGS触摸屏程序及远程组态监控系统设计,PLC与MCGS触摸屏通过PLC的编程口通讯,远程通用分组无线服务技术(GPRS)通讯模块与PLC通过485通讯,2种通讯模式中PLC均作为下位从机,上位机组态监控程序的设计将另文撰述。 PLC主程序流程如图3所示。
4 结论
本研究设计了集成传感器射流清洁系统的水产养殖环境监测系统,该系统可以实现传感器自动定期清洁,且采用采样箱结合水泵进行水质采样,可以实现多个采样点测试。采用PLC对系统进行控制,结合上位机组态监控系统,实现了自动增氧、清洗、测试的自动工作循环、手动清洗、手动水质测试以及历史数据显示、查询等功能。
参考文献:
[1]肖 忠,陈 怡,莫洪林. 鱼塘溶解氧自动监控系统的设计与研究[J]. 农机化研究,2009,31(5):142-145.
[2]陈 刚,朱启兵,杨慧中. 水产养殖在线监控系统的设计[J]. 计算机与应用化学,2013(10):1139-1142.
[3]袁 琦,储春华,翁绍捷. 基于AT89C51水产养殖环境参数自动监测系统设计与实现[J]. 农业网络信息,2012(4):13-16,20.
[4]刘庭成,范晓红. 高压水射流清洗机射流打击力的研究分析[J]. 清洗世界,2008,24(12):26-29.
[5]武占芳,刘丽伟,鲁传林,等. 高压水射流清洗钢板系统参数分析与研究[J]. 冶金设备,2009(3):60-64,49.
