xPC Target在“PID控制算法”教学中的应用
2015-08-10 23:54:36梁广瑞
广西教育·C版 2015年7期
【摘 要】介绍了在自动控制理论课程中引入xPC Target半实物仿真控制系统,采用引导文教学法进行“PID控制算法”教学的实践。
【关键词】xPC Target 引导文教学法 PID控制算法
【中图分类号】 G 【文献标识码】 A
【文章编号】0450-9889(2015)07C-0187-02
PID控制算法是控制理论中一个非常重要的知识点,不仅内容抽象、理论性强,而且工程实践性强,标准PID以及各种改进的PID控制算法在实际生产中大量应用,占据着主导地位。由于该算法是理解反馈控制的基础以及它的实用性,自动化类专业中除了在自动控制原理、PLC应用等课程做重点介绍外,往往还安排综合实训来强化对该算法的认识。由于高职高专学生一般数学基础和抽象思维能力较差,在以上的几门课程教学中(它们往往是安排在不同的学期中)又难以互相紧密配合,故教学效果不甚理想,教师难教,学生难懂。为了提高教学效果,尝试在自动控制原理中引入xPC Target实时仿真技术并应用引导文教学法进行教学,取得了很好的成效。
一、传统教学方法的不足
对于PID控制算法的学习,传统的教学方法主要有讲授法和仿真实验法。讲授法就是教师在课堂上通过公式推导和例子讲解,将知识和技能传授给学生。仿真法则在课堂引入数学软件Matlab,使用M语言编写程序或simulink搭建仿真模型,让学生有一个“虚拟”的认识。仿真法的引入是自动控制原理教学近年来的一大改进,新出版的相关教材几乎都引入了Matlab这个强大的数学工具。但是对于普通的高职高专学生,他们的数学基础较为薄弱,抽象理解能力不强,不管是讲授法还是仿真法,对他们来说,看到的、听到的还都是很“虚”的数学公式,难以接受。
高职高专学生的学习情绪化较强,对感兴趣的东西可以有较高的学习积极性,对于抽象枯燥的东西则不愿学习,效率低下。如果学习任务能够与具体实物密切联系,有一定的可操作性和实用性,则他们乐于挑战任务,并可以保持较为持久的兴趣。传统教学法在讲授该部分内容时,正是缺少理论与实际相结合的具体实物以及引申出的教学设计,xPC Target是Matlab平台下的一种半实物实时仿真技术,能够使用Matlab的Simulink/Stateflow等设计出来的控制器直接去控制受控对象实物,它的特点正好弥补这种缺陷。引入xPC Target,可以更好地采用新的教学方法,比如项目教学法、引导文教学法等,从而能更好地将理论和实践结合在一起,提高教学效果。
二、xPC Target简介及基本原理
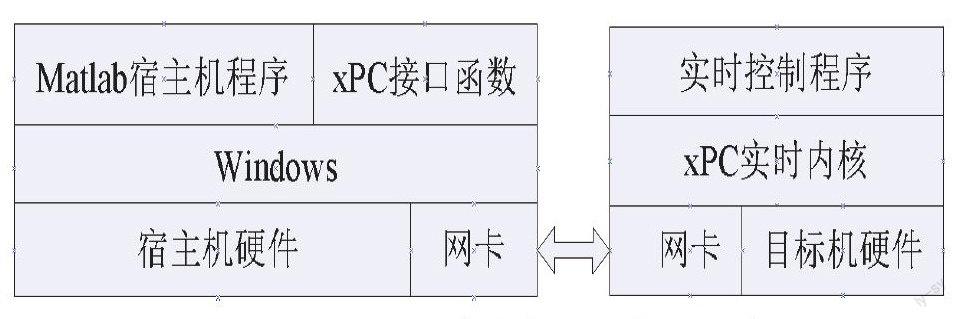
xPC Target是MathWorks提供的一种快速原型设计的方法,用于控制器的实时测试和开发,支持多种通用的PC输入、输出卡。xPC Target 是一种宿主机-目标机的运行模式,包括硬件系统和软件系统。硬件系统包括宿主机、目标机、目标机上的I/O板卡,软件系统在宿主机上包括windws系统、Matlab宿主机开发环境、xPC接口函数,目标机上包括xPC实时内核以及实时控制程序。宿主机和目标机之间通过串口或以太网进行通信。用户首先在宿主机上使用Matlab,Simulink等高级语言开发控制程序,然后下载到目标机上实时运行,宿主机和目标机可以交互显示数据和信号。值得注意的是,xPC实时内核是Matlab在宿主机上生成的,目标机除了PC本身带有的引导程序外,不需要任何其他系统软件。
图1 xPC Target系统宿主机-目标机示意图
三、基于xPC Target的单容液位控制系统的搭建
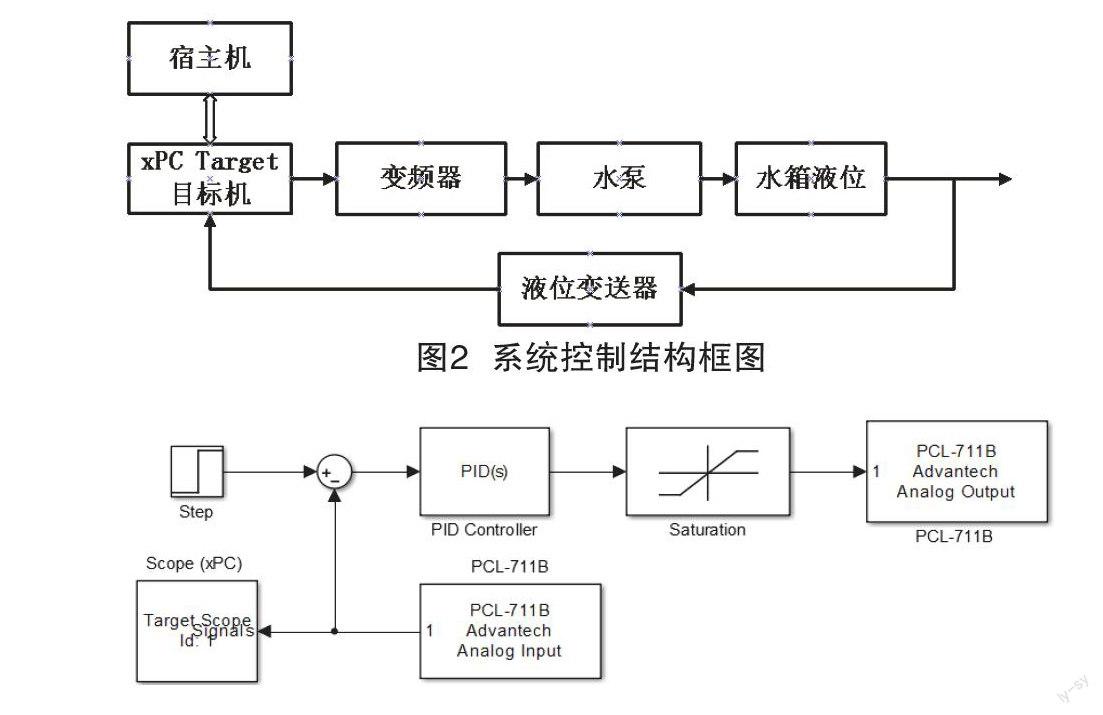
单容液位控制系统是高校自动化课程中典型使用的被控对象,采用xPC Target系统可以搭建如图2所示的系统控制结构框图。xPC Target目标机上使用研华的高性能、高速多功能数据采集控制卡PCL-711B。它提供了8路12位A/D、1路12位D/A以及16路TTL兼容的输入输出。Matlab/simulink的xPC Target工具箱中带有该款的模块。根据系统控制结构图,编写Simulink的PID控制程序,如图2所示。使用Target Scope,可以在目标机上实时显示动态数据曲线,如果仿真选择External模式,则宿主机可以访问到目标机数据,使用Matlab的普通Scope进行分析。
图2 系统控制结构框图
图2 xPC Target的PID控制程序
从以上的控制系统结构和程序可以看出,xPC Target的使用非常简单、直观、自然,对于已经在前面章节课程中使用Matlab进行过控制系统分析的学生来说,是一个很好的分析设计工具。在整个教学过程中,学生充满了兴趣,并很快掌握了这种先进的分析与设计方法,值得同行在教学过程中借鉴使用。
四、引导文教学法
引导文教学法是借助引导文等教学文件,通过工作计划和自行控制工作过程等手段,引导学生独立学习工作的教学方法。这种方法实际是项目教学法的完善和发展,其特点是具有明确的任务和引导问题,使学生独立思考、解答,找出完成工作的方法。
引导文的编写是关键,学生通过阅读引导文,明确学习目标,清楚知道应该完成哪些工作,掌握哪些知识、技能。本教学内容采用该方法进行组织教学。以下是本项目的引导设计。
(一)学习领域
PID控制算法及计算机控制。
(二)学习情境
在现代化水厂中,有一道过滤工序,滤池底部铺有约0.5m厚的细砂,并有出水阀门,前道工序处理过的水进入滤池后,为了滤水速度和滤水效果的最佳匹配,要求保持1.2m的液位,为了实现这个要求,需要使用PID控制算法,作为水厂自动化工程师,请你用实物仿真该控制模型,并完成PID算法的设计。
(三)学习任务
使用xPC Target作为控制器,采用PID控制算法实现单容液位被控对象的恒水位控制。
(四)学习时间
8课时。
(五)任务描述
了解xPC Target单容液位控制系统的硬件组成,对xPC Target宿主机-目标机进行参数设置,使用Simulink编写PID控制算法,液位响应曲线图形显示,PID控制参数的整定。
(六)引导问题
简述xPC Target宿主机-目标机的构成、工作原理及特点?
控制水箱液位的办法是什么?
液位变送器输出的电压信号与液位高度有什么关系?
输入给变频器的电压信号与变频器控制水泵转速有什么关系?
简述xPC Target目标机与变频器,液位变送器的信号匹配以及传递方向。
使用xPC Target,如何设置Matlab环境参数?
PCL-711B采集电压和输出电压与模块数据的对应关系?
P、I、D三个参数中,P参数有何作用,能否消除稳态误差?
P、I、D三个参数中,I参数有何作用,当进入稳态且没有稳态误差后,P输出为多少,I输出的控制量跟被控对象有何关系?
P、I、D三个参数如何整定?
(七)信息来源
单容液位实验系统说明书。
xPC Target半实物仿真的相关论文。
xPC Target Users Guide(整理出有关部分)。
xPC TargetI/O Reference Guide(整理出有关部分)。
《基于MATLAB/Simulink的系统仿真技术与应用》,薛定宇、陈阳泉著,清华大学出版社。
《过程控制与Simulink应用》,王正林、郭阳宽著,电子工业出版社。
PID控制算法是自动化类专业中非常重要的知识点,用传统的讲课方法学生觉得枯燥无味,引入了xPC Target,并采用引导文教学法后,引起了学生极大的兴趣,不仅自始至终全程参与教学,而且能够发现自己的问题和不足,学生主体能动性得以充分体现,相比传统教学法,取得了更好的教学效果。
【基金项目】2014年广西机电职业技术学院院级项目
【作者简介】梁广瑞(1979- ),男,广西南宁人,广西机电职业技术学院电气工程系讲师,硕士,研究方向:机电一体化技术。
(责编 丁 梦)