
基于信号体制的热噪声模型及对RAIM 的影响
2015-08-10 09:42:24崔晓伟陆明泉
浙江大学学报(工学版) 2015年4期
贺 刘,姚 铮,崔晓伟,陆明泉,郭 婧
(1.清华大学 电子工程系,北京100084;2.中国民航科学技术研究院,北京100084)
随着GPS与GLONASS的现代化,Galileo与我国北斗系统的建设,全球GNSS系统进入了蓬勃发展时期,多模、多频联合导航已成为导航系统发展的主要趋势[1].由于测距源数量的倍增,客观上增大了测距出现故障偏差的概率,热噪声、多径、干扰等复杂环境将削弱测距的可靠性,观测测距的完好性日趋重要.接收机完好性监测(receiver autonomous integrity monitoring,RAIM)技术作为用户端唯一的完好性监测手段,通过故障检测与排除(fault detect execution,FDE)算法,利用冗余观测信息进行一致性统计校验,剔除含粗差的故障测距,以提升测距置信度水平,进而保证定位估计的准确性.
由于受测距噪声与接收设备热噪声的影响,测距观测精度不完全相同,方差随着俯仰角度及C/N0等多种因素相应变化.在传统加权RAIM 算法与模型 中, NIO-RAIM (novel integrity-optimized RAIM)算法[2]针对卫星特征斜率提出最优加权,可以有效地提升系统可用性,但会牺牲一定的定位精度,且复杂度较高,不易在侧重定位域的实时接收机中使 用;广 域 增 强 系 统(wide area augmentation system,WAAS)加权模型[3]的适用范围较窄,仅限于GPS,不适用于多模多频场景;双频加权模型[4]基于服务体积模型(service volume model,SVM),涵盖了残余电离层延迟、对流层延迟及多径等主要误差源,适用于GPS/Galileo双模双频场景,但频点间加权因子等权,带来了一定的热噪声模型偏差.
传统加权模型均未考虑信号体制对接收机热噪声的影响.在接收机伪码跟踪环路中,复合二进制偏移载波(composite binary offset carrier,CBOC)、交替二进制偏移载波(alternate binary offset carrier,AltBOC)等新型调制方式与二进制相移键控(binary phase shift keying,BPSK)类传统调制方式的码跟踪精度不同.尤其在双频组合场景中,采用双频定位解算方法虽然能够有效地抑制电离层延迟,但对各信号热噪声及多径延迟有一定的放大作用,这将加大信号体制间观测量的精度差距,造成测距观测精度不等权现象.
传统加权模型忽略了信号体制原因带来的测距精度不等权问题,该模型假设与实际不符的情况将对加权RAIM 技术性能的评估带来偏差.本文在噪声干扰层面,通过仿真分析了几种典型信号在伪码跟踪延迟锁相环路(delay-locked loop,DLL)跟踪精度的差异性,根据信号调制方式、接收机设计参数和C/N0,建立新型接收机伪距误差热噪声模型,推导了各频点测距加权因子的产生方式,进而细化完善了新型双频加权模型.仿真测试表明,该模型能够更加合理地反映双频测距的实际噪声,优化了双频加权RAIM 算法的FDE 性能,提升了测距置信度水平并有效保证了定位精度,适用于不同信号体制共用的双频定位域场景.
1 信号体制对码伪距测量精度的影响
1.1 多信号体制共用的现实趋势
随着信号结构的设计与发展,出现了新一代信号体制,如在二进制偏移载波(binary offset carrier,BOC)信号基础上发展出的CBOC、AltBOC 等新型导航信号调制方式.新信号易于实现频段资源复用、利于信号捕获,具有降低伪码跟踪误差、抑制信号多径等显著优势,已广泛应用于GNSS 各频点中.传统BPSK-R 信号将在导航系统中继续使用,多种导航信号体制的共用与互操作已成为GNSS系统的现实应用趋势.表1给出目前GNSS系统采用的主要信号调制方式.表中,BPSK-R(n)指具有(n ×1.023) MHz码片速率的BPSK-R 信 号;BOC(a,b)指一个(a ×1.023) MHz的方波频率与一个(b ×1.023) MHz码片速率产生的BOC 调制信号;CBOC(6,1,1/11)信号是BOC(6,1)与BOC(1,1)通过时分复用方式,在导频通道中按照1/10功率比组合而成;类似地,BOC(6,1)与BOC(1,1)在时间复用二进制偏置载波(time-multiplexed BOC,TMBOC)(6,1,4/33)信号导频通道中的功率分配比是4/33.
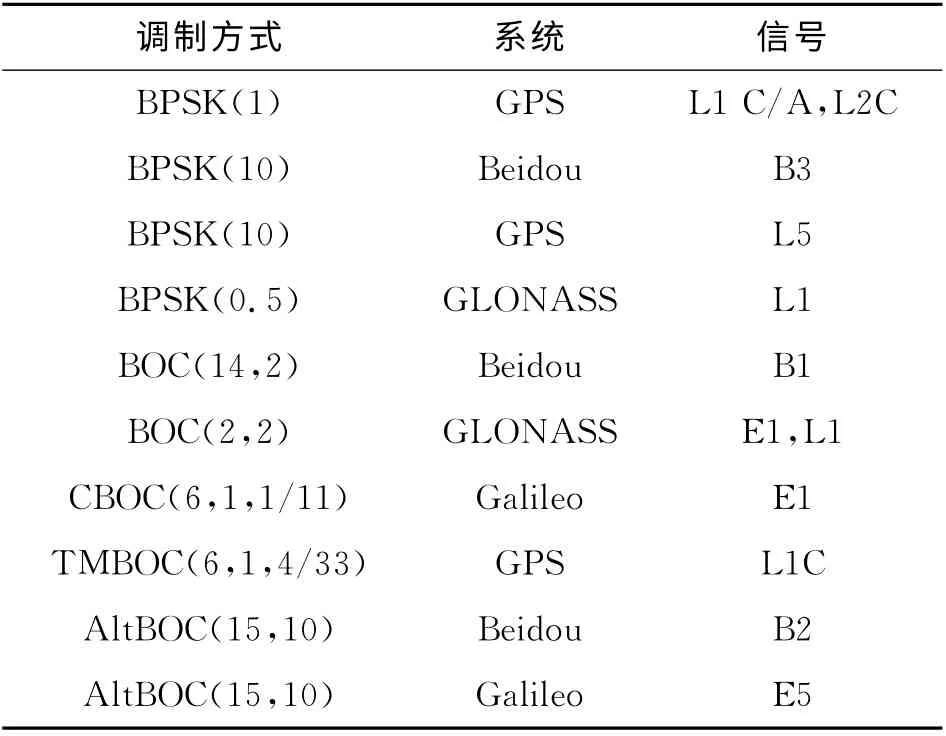
表1 GNSS广泛采用的信号体制Tab.1 Widely adopted signal structures of GNSS
1.2 信号体制间码跟踪精度的差异性
为了分析不同信号体制在接收机码环中的跟踪精度,选取广泛使用的BOC(14,2)、CBOC(6,1,1/11)、AltBOC(15,10)与BPSK-(1)、BPSK-(10)进行分析.分析的跟踪方法使用非相干超前和滞后(noncoherent early-late processing,NELP)算法.
根据码跟踪误差理论估计理论[5-9]可知,信号通过DLL环路鉴别器后,输出热噪声鉴别误差方差为
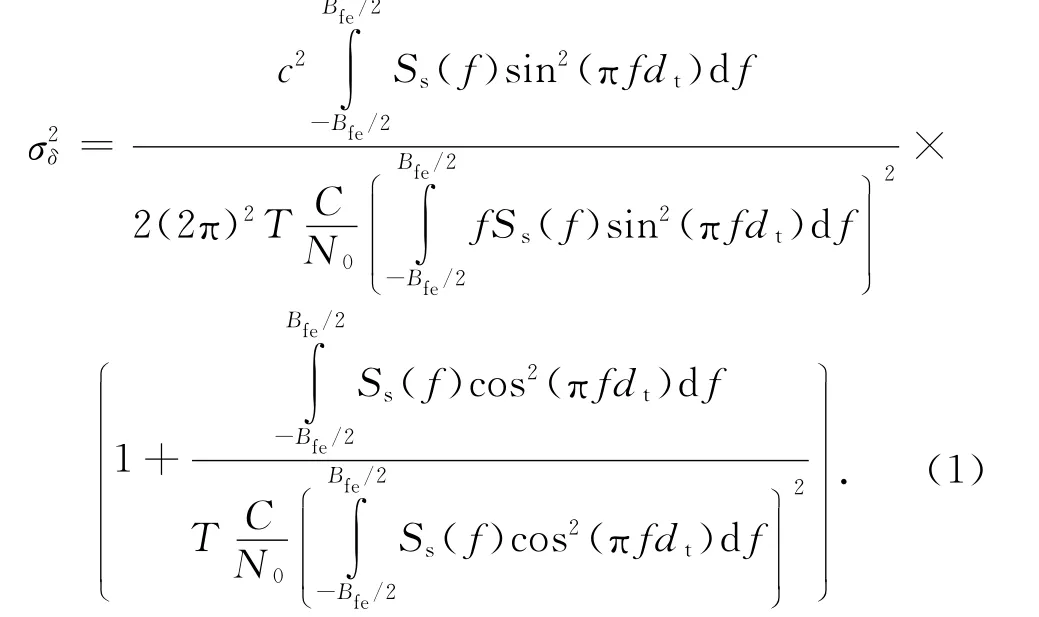
式中:c为光速,Bfe为接收机前端带宽,Ss(f)为信号调制方式的归一化功率谱密度,T 为预检测积分时间,dt为相关器超前、滞后间隔.信号通过环路滤波器后,DLL环路码跟踪误差σDLL为

式中:BDLL为滤波器带宽,σDLL为信号在单位测距标准差σ下的伪距测量精度.
σDLL与接收机设计参数相关,假设滤波器带宽BDLL为5Hz,预检测积分时间T 为20ms,AltBOC(15,10)前端带宽为51 MHz,其余信号前端带宽为18MHz.通过仿真得到各信号的码环跟踪误差理论下限值,如图1所示.可以看出,不同信号调制方式下的σDLL差别明显,尤其在C/N0较低的弱信号条件下,40dB-Hz时BPSK-(1)的码跟踪误差与其他调制信号相比已超出0.5m.
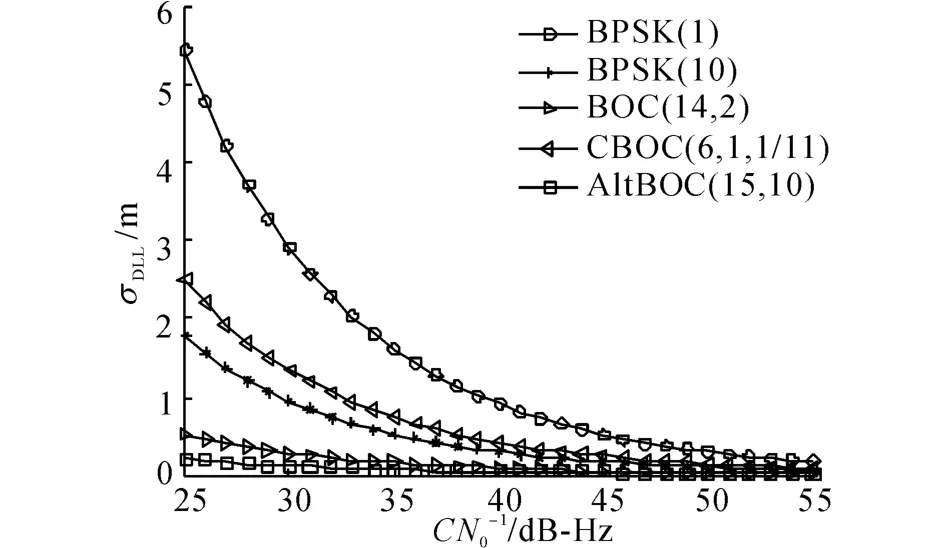
图1 各信号的码跟踪误差Fig.1 Code tracking error of signal structures
2 新型双频加权模型
通过处理捕获信号的直接扩频序列,实现接收机码片同步,进而可以获得伪距观测值.码伪距作为基本观测量,置信度是影响PVT 定位精度的主要因素.理想测距为卫星与用户间的真实几何距离,而实际测距含有噪声误差.一般地,测距噪声服从期望为零、方差为σ2的高斯分布.噪声方差越小,最终的定位结果越接近用户的真实位置.测距噪声方差是多种误差方差的期望之和,可以表示为

式中:σURA为星历误差,σiono为电离层延迟,σtropo为对流层 延 迟,σmpth为 多 径 误 差,σrevr为 接 收 机 热 噪声误差.
2.1 传统等权值双频模型
为了获得更精确的定位解,可以通过2种方法抑制或部分消除噪声的影响:一是通过算法或模型消除部分噪声误差;二是通过加权算法,以提高或降低测距权值的方式归一化噪声方差.在双频组合中,依靠频点测距作差能够消除大部分的电离层延迟,但热噪声属于系统误差,很难消除.在GPS/Galileo双模双频场景中,传统加权模型和各类误差方差模型[10-12]可以表示为

式中:测 距 间 用 户 距 离 精 度(user range error,URA)可取1、0.5、0.2m;σ2L1L2为0.04,表示双频误差参数.对流层延迟模型σi,tropo为
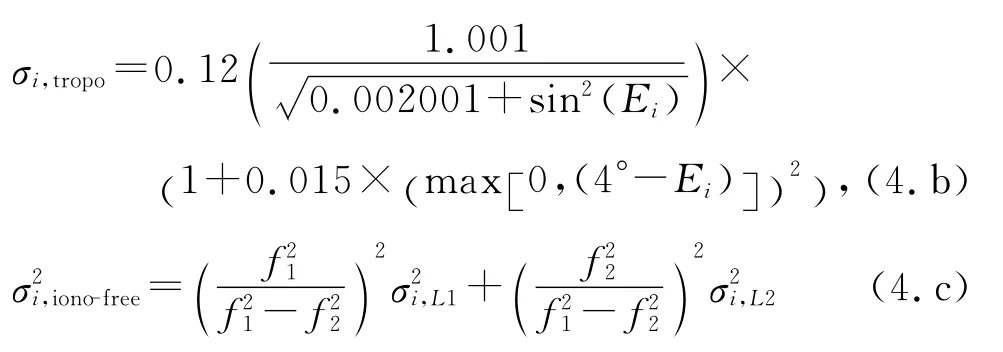
表示各频点无电离层延迟模型,其中各频点测距加权因子相等:

热噪声模型RMSpr-air与多径延迟模型与仰角Ei相关:

2.2 新型接收机伪距误差热噪声模型
在双频组合的实际应用中,一般可以假设URA误差相等,由于频点间信号经过近似相同的对流层路径,σtropo相等,σrevr及σmpth相互独立.
根据1节的分析可知,不同信号体制下码跟踪误差存在明显差异,各频点测距热噪声不等.由式(4.d)、(4.e)、(4.f)可知,传统模型中热噪声方差RMSpr_air与仰角相关,且假设各频点测距σi,L1与σi,L2相等,这与接收机DLL环路热噪声的实际情况存在一定的偏差.传统模型的频率方差σ2L1L2为固定值,不能灵活地兼容各系统各频点中心频率不同的情况.
由于传统模型不能兼顾不同调制方式组合使用的情况,尤其在如今新型信号和传统信号共用与互操作广泛应用时期.为了改进、修正传统模型中接收机热噪声模型的偏差问题,根据信号体制的差异性,由式(1)、(2)可得基于信号体制的新型热噪声方差模型:

新型热噪声模型与信号体制功率谱密度、接收机码环设计参数及C/N0相关,将该模型替换传统模型中的RMS2pr_air与σ2L1L2项,各频点测距的加权因子σ′i为
2.3 新型双频加权模型描述
双频组合能够消除大部分电离层误差,无电离层伪距ρi 的数学模型[13]为

式中:f1、f2为各频点的中心频率,ρL1、ρL2为各频点的伪距.对式(8)求期望后,可得双频加权方差为

由式(9)可见,双频组合将增大接收机热噪声和多径误差.当σ′i,L1与σ′i,L2一定时,2个频率的间隔越大,对误差的放大作用越小;当2个频点的伪距跟踪精度不同时,高频频点测距误差所占的比重更大.
综上所述,基于信号体制优化的双频加权模型为

σURA使用传统估计值.
3 新模型对RAIM 技术的影响
新型双频模型作为一项基础模型,可以广泛应用于加权定位估计与加权RAIM 技术.
根据加权最小二乘定位解算模型可知,加权最小二乘估计解[11]为

式中:R 为归一化噪声方差加权矩阵,

加权矩阵实现了测距误差的归一化处理.由式(11)可得归一化的伪距残差矢量w 与映射矩阵U:

w 各分量相互独立,可得w=URy=URn,其中n 为噪声矢量,服从期望为0、方差为1的高斯分布.由于w 的幅值体现了观测值间的一致性,可将归一化的伪距残差平方和作为检验统计量[14],双模条件下服从自由度为(n-5)的χ2分布.根据用户给定的虚警率Pfa能够确定归一化的检验门限值T,进而判决测距是否存在粗差.
4 仿真验证与分析
通过仿真得到GPS24 星星座及Galileo27/3/1Walker星座,仰角遮蔽角为5°,时长1d,采样步长为1min,获得1 440个采样点.以5°×5°为采样区间,遍历得到全球范围可见卫星数的分布情况,如图2所示.图中,SatN为可见卫星数,Pr为分布概率.
按照航空无线电委员会(Radio Technical Commission for Aeronautics,RTCA)规定的“最小操作性能标准”[15]要求,遍历全球24个地点.测距标准差σ统一取2.5m,URA 取1m,Pfa取0.01.假设各系统双频组合为:GPS L1 C/A 码BPSK-R(1),中心频点频率为1 575.42 MHz,L5BPSK-R(10),中心频点频率为1 176.45 MHz;Galileo E1 CBOC(6,1,1/11),中心频点为1 575.42 MHz,E5a AltBOC(15,10),中心频点为1 191.795 MHz.
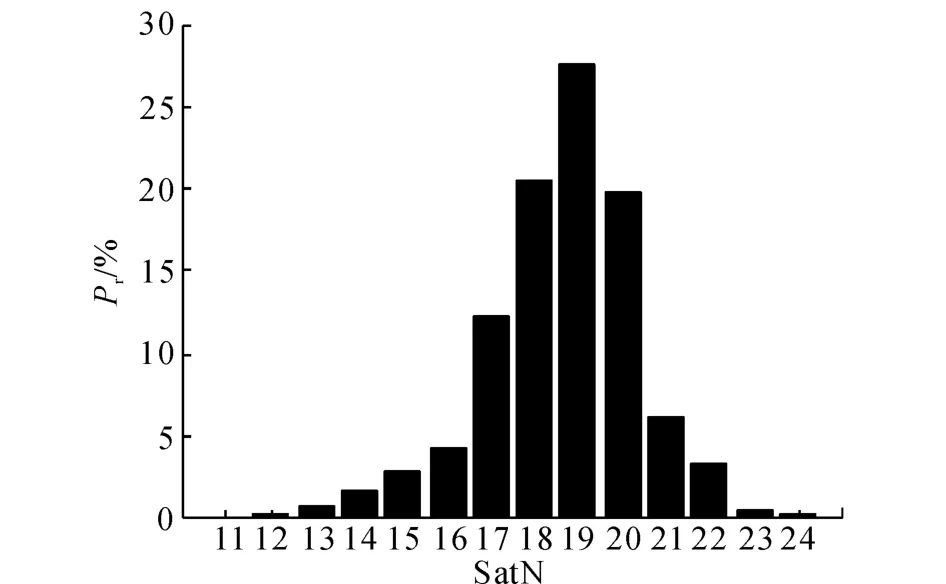
图2 可见卫星数分布Fig.2 Distribution of number of visible satellites
为了仿真对比各模型对全球RAIM 技术FDE平均性能的影响.设置3种处理方法,方法a为单频处理方法,方法b为双频等权处理方法,方法c为本文提出方法.由于双模或多模场景的漏检率极低[16],考虑故障检测率和虚警率指标.为了便于直观显示,在虚警量级接近的条件下,对新模型与传统模型进行比较.表2给出各场景3~10σ的全球24地点的平均FDE 性能.单频方法的故障检测率较低,虚警率极低.双频方法的故障检测率大幅高于单频方法,本文方法优化了加权RAIM 技术的FDE性能,c方法的故障检测率优于b方法,尤其在故障较小时更加显著.
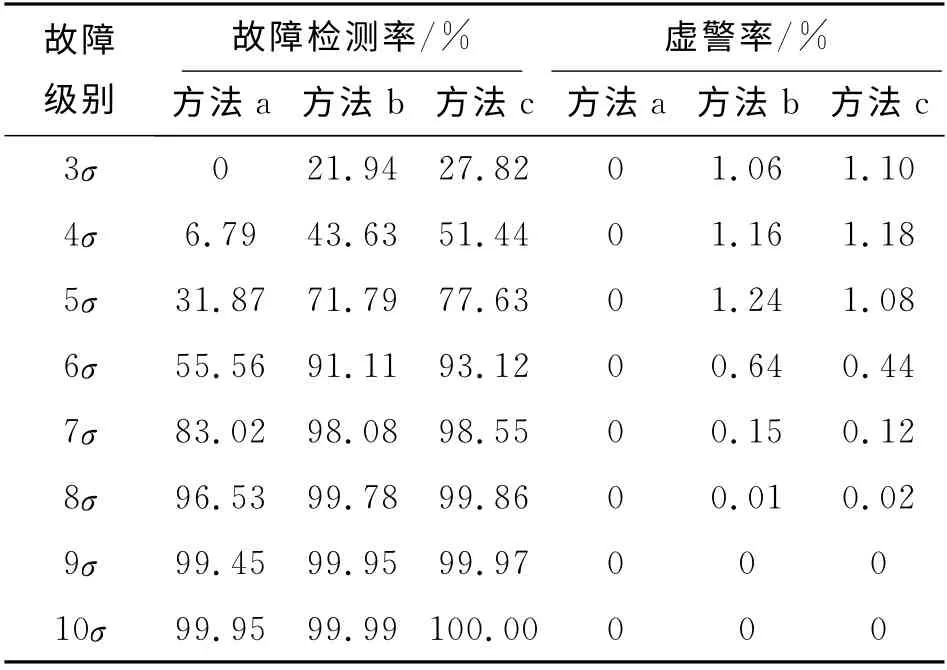
表2 平均FDE性能Tab.2 Average FDE performance
在上述仿真环境下,经过FDE 步骤,分析各方法的定位精度.选择北京观测站,随机选取一个健康卫星,在观测测距的各个采样历元中均加入±5 m至±25m 的随机突变偏差,得到图3所示的各场景定位 精 度,三 维 均 方 根 误 差(root mean square,RMS)列于图3的右下角.图中,Lat为纬度,Lng为经度.由于故障检测率较低,含故障偏差测距影响了观测测距置信度,方法1的RMS较高,为4.41m;方法2的RMS为3.37m;经过本文提出模型的进一步优化,方法3的RMS降至2.96m,与双频等权方法相比,定位精度提升约0.4 m.需要指出,方法2、3是经过RAIM 故障检测与排除,获得较高测距置信度,并对测距噪声归一化加权定位解算共同优化的结果.
为了不失一般性,表3给出各方法在全球24地点的平均RMS结果.各方法的定位精度与北京观测站定位精度相近,可以看出,采用本文模型可以有效地保证定位精度.
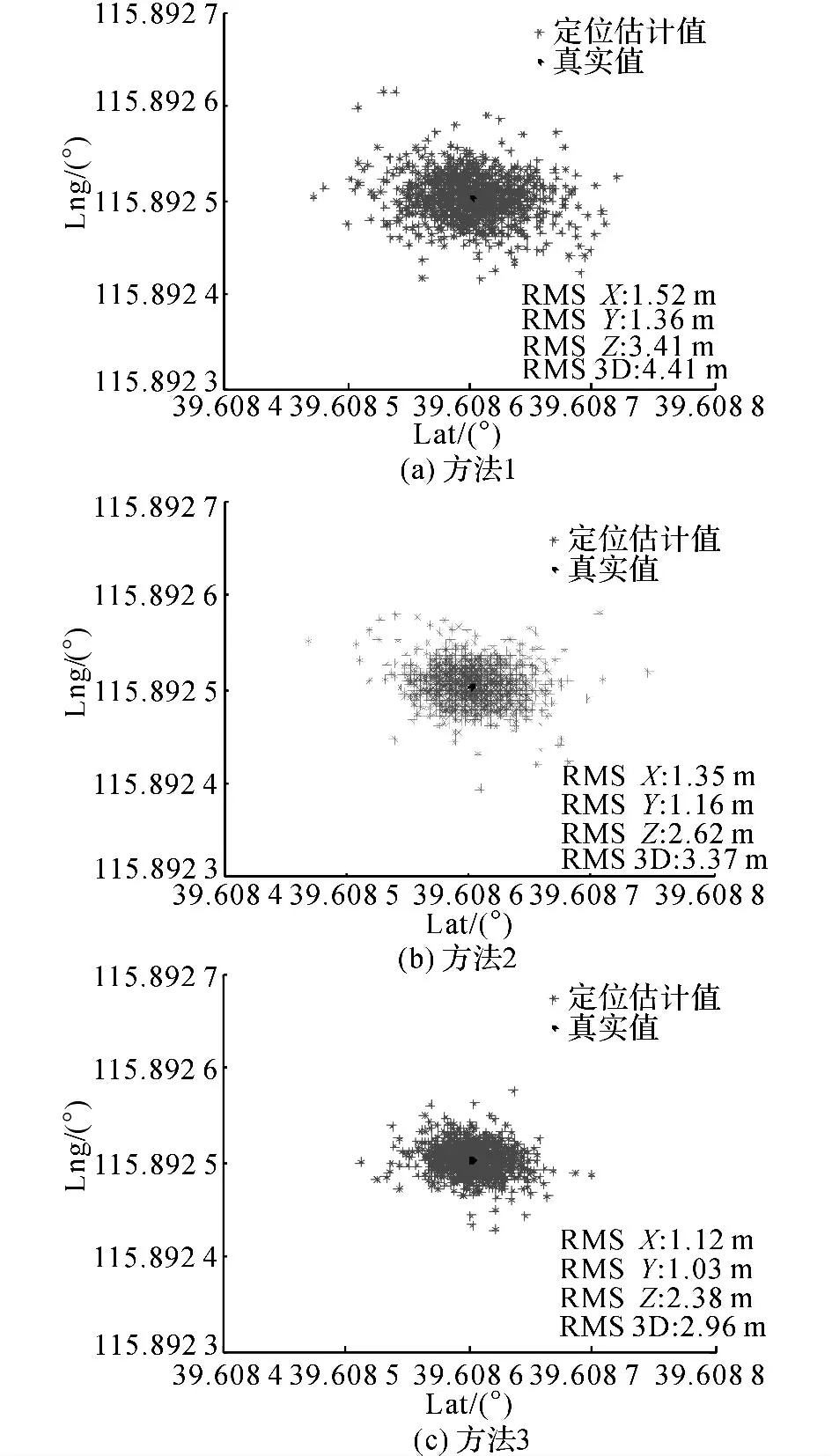
图3 方法1~3的定位精度Fig.3 Positioning accuracy of method 1~3
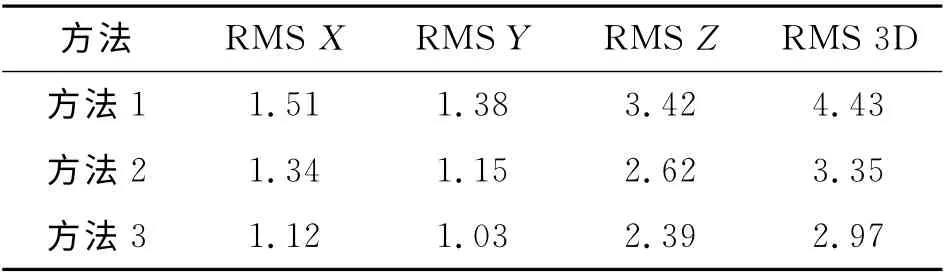
表3 全球24地点平均RMSTab.3 Average RMS of 24worldwide locations m
5 结 语
本文在分析几种典型信号调制方式在接收机DLL环路码跟踪精度的基础上,提出基于信号体制的接收机热噪声加权模型.结合传统双频组合各噪声方差估计,分析新模型对双频加权RAIM 技术性能及定位估计精度的影响.仿真测试表明,采用本文模型能够优化提高RAIM 技术FDE 性能,提升各频点测距置信度水平,并有效地保证定位精度,适合于信号体制共用条件下的定位域应用场景.作为基础加权模型,该模型能够适应信号体制多样化的展趋势,具有广泛适用性的特点.
(
):
[1]郭婧.多模多频卫星导航系统RAIM 技术研究[D].北京:清华大学,2011:1-12.GUO Jing.Research on RAIM for multi-constellation and multi-frequency satellite navigation systems [D].Beijing:Tsinghua University,2011:1-12.
[2]MADONNA P,VIOLA S,SFARZO L.NIORAIM algorithm applied to a multiconstellation GNSS:analysis of integrity monitoring performances in various phases of flight[C]∥Position Location and Navigation Symposium(PLANS).Palm Springs:IEEE,2010:1258-1263.
[3]WALTER T,ENGE P.Weighted RAIM for precision approach[C]∥ION GPS 1995.Palm Springs:[s.n.],1995:1995-2004.
[4]HARTINGER H,BRUNNER F K.Variances of GPS phase observations:the SIGMA-εmodel[J].GPS Solutions,1999,2(4):35-43.
[5]BETZ J W,KOLODZIEJSKI K R.Generalized theory of code tracking with an early-late discriminator Part I:lower bound and coherent processing[J].IEEE Transactions on Aerospace and Electronic Systems,2009,45(4):1538-1550.
[6]BETZ J W,KOLODZIEJSKI K R.Generalized theory of code tracking with an early-late discriminator part II:noncoherent processing and numerical results[J].IEEE Transactions on Aerospace and Electronic Systems,2009,45(4):1557-1564.
[7]何在民.卫星导航信号码跟踪精度研究[D].北京:中国科学院研究生院,2012:35-43.HE Zai-min.Research on code tracking accuracy for satellite navigation signals[D].Beijing:Chinese Academy of Sciences,2012:35-43.
[8]LIU A,AN J,WANG A.Effect of transform domain interference suppression on PN code tracking loops[C]∥2010 12th IEEE International Conference on Communication Technology.Nanjing:IEEE,2010:1064-1067.
[9]LIU Y,RAN Y,KE T,et al.Code tracking performance analysis of GNSS signal in the presence of CW interference[J].Signal Processing,2011,91(4):970-987.
[10]RTCA DO-229D,Minimum operational performance standards for global positioning system/wide area augmentation system airborne equipment[S].Washington,DC:RTCA,2006.
[11]KAPLAN E D,HEGARTY C J.GPS 原 理 与 应 用[M].寇艳红,译.北京:电子工业出版社,2012:258-265.
[12]LEE Y,BRAFF R,FERNOW J,et al.GPS and Galileo with RAIM or WAAS for vertically guided approaches[C]∥Proceedings of the Institute of Navigation GNSS.Long Beach:Institute of Navigation,2005:1801-1825.
[13]刘家兴.卫星定位精度和自主完好性的改进[D].北京:清华大学,2008:25-27.LIU Jia-xing.Improvement of satellite positioning sccuracy and sutonomous integrity[D].Beijing:Tsinghua University,2008:25-27.
[14]代长勇,常青,陈媛.多系统卫星导航接收机自主完好性监测[J].遥测遥控,2010,31(6):11-15.DAI Chang-yong, CHANG Qing, CHEN Yuan.Multi-system satellite navigation receiver autonomous integrity monitoring[J].Journal of Telemetry,Tracking and Command,2010,31(6):11-15.
[15]RTCA DO-229D,Minimum operational performance standards for airborne supplemental navigation equipment using global positioning system (GPS).Washington,DC:RTCA,1991.
[16]许龙霞,张慧君,李孝辉.多模卫星导航系统的RAIM算法研究[J].时间频率学报,2011,34(2):131-138.XU Long-xia,ZHANG Hui-jun,LI Xiao-hui.Study on RAIM algorithm of multi-mode navigation system [J].Journal of Time and Frequency,2011,34(2):131-138.
猜你喜欢
广东通信技术(2023年9期)2023-10-29 07:09:32
军事文摘(2023年4期)2023-04-05 13:57:35
科学(2020年3期)2020-01-06 04:02:51
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
电子制作(2017年7期)2017-06-05 09:36:13
电信工程技术与标准化(2015年10期)2015-12-22 09:08:10
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
电信工程技术与标准化(2013年4期)2013-08-09 08:22:28
