
Cyber-physical-social System in Intelligent Transportation
2015-08-09 02:00GangXiongFenghuaZhuXiweiLiuXisongDongWulingHuangSonghangChenandKaiZhao
Gang Xiong,Fenghua Zhu,Xiwei Liu,Xisong Dong,Wuling Huang,Songhang Chen,and Kai Zhao
Cyber-physical-social System in Intelligent Transportation
Gang Xiong,Fenghua Zhu,Xiwei Liu,Xisong Dong,Wuling Huang,Songhang Chen,and Kai Zhao
—A cyber-physical system(CPS)is composed of a physical system and its corresponding cyber systems that are tightly fused at all scales and levels.CPS is helpful to improve the controllability,ef fi ciency and reliability of a physical system, such as vehicle collision avoidance and zero-net energy buildings systems.It has become a hot R&D and practical area from US to EU and other countries.In fact,most of physical systems and their cyber systems are designed,built and used by human beings in the social and natural environments.So,social systems must be of the same importance as their CPSs.The indivisible cyber, physical and social parts constitute the cyber-physical-social system(CPSS),a typical complex system and it’s a challengeable problem to control and manage it under traditional theories and methods.An arti fi cial systems,computational experiments and parallel execution(ACP)methodology is introduced based on which data-driven models are applied to social system.Arti fi cial systems,i.e.,cyber systems,are applied for the equivalent descrip-tion of physical-social system(PSS).Computational experiments are applied for control plan validation.And parallel execution fi nally realizes the stepwise control and management of CPSS. Finally,a CPSS-based intelligent transportation system(ITS)is discussed as a case study,and its architecture,three parts,and application are described in detail.
Index Terms—Cyber-physical-social system(CPSS),ACP approach,intelligent transportation system(ITS),parallel control and management,internet of vehicles,social transportation network.
I.INTRODUCTION
IN past several decades,3C(computing,communication, and control)technology has been successfully applied to many important physical systems,like defense,energy,critical infrastructure,health care,manufacturing and transportation, and dramatically enhanced their controllability,adaptability, autonomy,ef fi ciency,functionality,reliability,safety,and usability.
With the social and technical development,these physical systems should be controlled or managed by their cyber systems with the help of such novel technologies as internet of things(IoT),social network,cloud computing,big data and intelligent systems.Originally,cyber-physical system(CPS)was proposed by Americans in 2000s,and since then it gradually becomes a hot global R&D topic of many disciplines and application areas.
A CPS constitutes a physical system and its cyber systems that are tightly integrated at all scales and levels,and CPS is intended to provide a wide range of innovative applications and services.Cyber systems are increasingly embedded in all types of physical systems,and are making the systems more intelligent,energy-ef fi cient and comfortable,e.g.,intelligent transportation systems(ITS),factories,and cities.The CPSs are becoming ubiquitous in everyday life and their complexity is growing continuously.
The potential bene fi ts of the CPS can be found in several dimensions:intervention,e.g.,collision avoidance;precision, e.g.,robotic surgery and nano-level manufacturing;operation in dangerous or inaccessible environments,e.g.,search and rescue, fi re fi ghting,and deep-sea exploration;coordination, e.g.,traf fi c control,war fi ghting;ef fi ciency,e.g.,zero-net energy building;and augmentation of human capabilities,e.g., healthcare monitoring and delivery[1].
Since 2007,the investment in CPSs as a national imperative of US has been responded in several reports by the President’s Council of Advisors on Science and Technology(PCAST). Recently,McKinsey Global Institute Report identi fi ed 12 technologies that will transform“life,business,and the global economy”by 2025,several of which are directly pertinent to CPSs,like mobile internet,IoT,cloud computing,advanced robotics,3D printing,autonomous and near-autonomous vehicles.
Since 2006,the US National Science Foundation(NSF) has identi fi ed CPSs(Fig.1)as a key area of research[2-3], sponsored several workshops on CPS,and launched CPS program including more than 300 R&D projects about CPSs theory,methods,research tools,platforms,systems,and so on. Its goals are to bridge previously detached research areas and develop a uni fi ed systems science for CPSs.In 2009,“smarter planet”proposed by IBM becomes one strategic solution of CPS’s application practice.
In 2013,EU invested 658 million Euro to launch the“Smart Cyber-Physical Systems”program.The participants include CPS’s suppliers and users,tool providers,system integrators, related academia and research institutes.Its target is to helpbusinesses from any sectors improve the quality and performance of their products and services with innovative embedded information communication technology(ICT)components and systems.For example,in industry domain,empowered by cloud computing and big-data technologies,the CPSs lead to“Industry 4.0”,which is supported by the IMC-AESOP project and industrial partners including Schneider Electric, SAP,Honeywell,Microsoft,etc.

Fig.1.Cyber-physical systems de fi ned by NSF.
CPS is a kind of complex system,which is one of the ten basic research topics de fi ned by Chinese Medium-long-term Program(2006-2020).The R&D achievements of complex system are usually applied to national strategic areas,such as energy,transportation,manufacturing,military,innovative social management,and so on.
However,the CPSs generally do not quantitatively estimate the impacts from humans,organization,and societies,which are uncertain,diverse,and complex.It means that a CPS may not adapt to all business situations and become useless under some conditions,and it is not a human-centered system with the feedback of social factors.Fortunately,those social behaviors can be acquired,analyzed,and utilized to optimize the control and management performance of the complex systems based on the ubiquitous Internet and big data technologies.Recently,to involve human factors and the interaction between human and physical or cyber component,some researchers proposed a concept of cyber-physicalhuman(CPH)system[4-6].Actually,earlier than the concept of CPH system,the cyber physical social system(CPSS)has been proposed by integrating the social components into the CPS[3],and the CPSS contains the research scope of CPH system.
The rest content of the paper is organized as follows. Section II introduces CPS and CPSS,including characteristics, theory and technology,application,constraints and challenges of CPS.The de fi nition,research target and content of CPSS are also explained.Section III introduces ACP methodology, parallel control and management of complex CPSS.Section IV is a case study of CPSS-based transportation,where architecture framework,physical transportation system,social transportation system,future research directions,and case study“internet of smart vehicles and intelligent driving”are described in detail;Conclusions are drawn in Section V.
II.FROMCPSTOCPSS
A.CPS Overview
1)Some Typical Characteristics:Often endowed with control,monitoring and data gathering functions,CPS need to comply with essential requirements like safety,privacy,and security as well as controllability,usability and adaptability constraints.Some typical characteristics of CPS are[7-8]:
a)The physical component and cyber component of CPS should be closely integrated,normally by using embedded system.Its resources,such as computing and network bandwidth, are usually limited.
b)CPS is connected at multiple and extreme scales,normally with the unreliable networks,including wired/wireless network,WLAN,Bluetooth,and Nordic,etc.The unreliable network makes the distributed interactions of CPS’s components unpredictable.
c)CPS demonstrates a high level of heterogeneity,including sensor nodes,mobile devices,high end workstations and servers.The different components of CPS probably have nonuniform granularity of time and spatiality,so CPS is strictly constrained by spatiality and real time.
d)CPS with mobile devices present additional complexity, because they may interact opportunistically,and external interference may have a worse effect upon the reliability of the distributed interactions.For example:in a vehicular network, interactions may be possible only when two vehicles come within range of each other.Furthermore,the movement of mobile nodes may be determined by unpredictable factors such as user behavior.
e)CPS is in favor of convenient man-machine interaction, and for this purpose the advanced feedback control is widely applied.But,many existing uncertainties make CPS unreliable, as it is dif fi cult to apply traditional model-based control methods.
f)As a large-scale/complicated system,CPS is necessary to have the reliability and security,which requires adaptive capabilities,such as dynamical recon fi guration and reorganization. Its operation must be dependable,certi fi ed in some cases.
2)Theories and Technologies of CPS:The development of new paradigms,concepts,and platforms or toolboxes is the foundation of CPS.The theories and technologies are mainly related to its communication,modeling,computing,control, framework,and security.
a)Machine-to-machine communications
M2M enables CPS’s components,like sensors,actuators, robots,and smart meter readers,to communicate with each other with little or no human intervention.Most of existing work is based on small-scale M2M models and centralized solutions,and there are only few decentralized solutions which do not scale well[9].There is a need to design M2M communication primitives that will scale to thousands and trillions of M2M devices,without sacri fi cing solution quality. The main paradigm shift is to design the localized algorithms, where CPS nodes make their own decisions based on local knowledge.
b)Modeling and validation
The modeling and veri fi cation of CPS is complicated because of their heterogeneous nature as well as their complexity. Cyber components are about the computing,communication, and control that are discrete,logical,and switched.Physical components are about natural and human-made physical systems,which are governed by the laws of physics and operated in continuous time.
Generally,mathematical formalisms(e.g.,hybrid automata and process algebras)and description languages(e.g.,hybrid Petri net)are popular candidates for modeling CPS[8]. Although hybrid systems are a very versatile tool for the speci fi cation and analysis of CPS models,they do not consider some fundamental concepts,which are intrinsic or essential in CPS models such as network,services and support for performance&functional analysis.
Derler et al.[10]focuses on the challenges of modeling CPSs that arise from their intrinsic heterogeneity,concurrency, and sensitivity to time.Speci fi c technologies include hybrid modeling and simulation,concurrent and heterogeneous models of computation,the use of domain-speci fi c ontology to enhance modularity,and the joint modeling of functionality and implementation architectures.
CPS should consider the close interactions between the physical system and its cyber system both in time and space dimension.These interactions are usually governed by events, which occur in physical system and should autonomously be re fl ected in its cyber system.By exploring the temporal and spatial properties of events,Tan et al.[11]develops a layered spatio-temporal event model for CPS,where the event is represented as a function of attribute-based,temporal,and spatial event conditions.Over the years,various techniques, algorithms,speci fi cation logic and software tools have been developed for simplifying CPS models to achieve certain veri fi cation goals[12-13].
c)Uni fi ed framework
Afteranalyzingthelimitationofcurrenttoolsand methods[8,14-15],a uni fi ed framework is proposed to enable the design,assessment,modeling,simulation and veri fi cation of large-scale and heterogeneous CPS in a uni fi ed manner. The reference architecture and platform for open,smart and co-operative CPS make it applicable across sectors and application domains,including industrial consensus buildings, reference implementations,pre-normative activities,proof-of concept demonstration,user involvement and validation in key application domains.
d)Control
CPS research aims to integrate physical and computational models in a manner that outperforms a system in which the two models are kept separate.CPSs can be generated by either folding properties of the physics-based system into a discrete modeling paradigm or vice versa.Bradley et al. suggested a novel CPS representation in which physical and computational systems are represented as a single continuous multi-variable linear system that allows the application of modern control techniques[16].This representation enables coregulation of physical and computational state to optimally balance the computational load with physical system stability and disturbance rejection at each control-loop cycle.
e)Computing platform security
CPS should be able to respond in real-time to dynamic and complex situations while preserving control,system safety, privacy,reliability,and addressing security and privacy“by design”across all levels.So,CPS must have the autonomous abilities such as self-con fi guration and self-healing in order to protect against environmental threats.That is,CPS must adapt automatically to the environment changes and detect, diagnose,and recover from any damage that occurs.In addition,communications with the physical world must be timely and dependable,and remote collaborations must be safe.A formal component-based software development methodology is the best suitable for CPS,because the entire system can be composed of system’s parts and physical processes that can be modeled as components[8].
Flow-based CPSs comprise of physical systems that can be modeled as fl ow networks where physical entities fl ow along the edges of the network.Such systems are vulnerable to attacks that can potentially have severe health and economic impacts.Securing such systems against attacks is of paramount importance.To equip such systems with cyberphysical security without incurring huge costs,Suresh et al. proposes architecture for cyber-physical security of fl ow-based CPS-based on mobile sensors in the inherent fl ow and static beacons residing in the physical system[17].
3)Application Research of CPS-based Transportation:We use CPS-based transportation as application research.The application research of CPS-based transportation is mainly about its modeling and veri fi cation,safety control,hybrid cloud-based platform and security control.
Modern vehicles include an extensive amount of discrete logic implemented in software,that is needed to control and safeguard various aspects of a vehicle’s operation:braking,steering,occupant safety,etc.So,powerful abstraction techniques is required to build discrete-event models from the underlying continuous or hybrid dynamics of single or multiple vehicles[18].
The modeling and veri fi cation of CPS-based transportation help to improve its throughput and safety.For example,drivers can drive more safely.As vehicle systems are becoming increasingly complex,the existing techniques for veri fi cation and validation of the discrete logic become insuf fi cient to produce the required performance and reliability.So,extensive on-road vehicle tests are used as current industry standard solution. For such purposes,United States Council for Automotive Research(USCAR)is working towards a standard for wireless communication communication between car to car(C2C)and car to infrastructure(C2I)[19].
Reactive synthesis algorithms from supervisory control theory are adapted to the distributed nature of CPS-based transportation.Since unclear faults or unexpected events occur quite often,for safety reasons,the synthesized discrete logic must always allow the degradation to a fail-safe mode of operation.
To address the problem of unknown road disturbance, Ghasemalizadeh et al.introduces a practical method thatutilizes a cloud-based system as well as V2V infrastructure[20]. In the proposed hybrid network,each vehicle is connected to a cloud-based database of road-pro fi les as well as to its nearby vehicles,and then the often updated road information on the cloud is available to all vehicles.Since the road disturbance is not an unknown data anymore,the simple and fast algorithms can use cheaper equipment with lower computation work.
Over the past few decades,automation has revolutionized transportation,ranging from individual vehicles to traf fi c networks.In the near future,partially or fully autonomous cars will be commercially available,which make the issue of security control of CPS-based transportation a critical need.The following problems should be solved[21]:How to model the interaction and dynamics of the cyber and physical components;How to analyze its security vulnerabilities with domain speci fi c knowledge;How to utilize the interdependencies to enable secure and robust operation and also enable countermeasures to attacks;How to model and use the“human-in-the-loop”for transportation security.
In summary,the researchers of CPS are interested in theoretical foundations,design and implementation,as well as real-world applications.As a whole,although some progresses have been made in its modeling,energy and security control, and design approach,CPS is still in the initial development stage.
B.Constraints and Challenges of CPS
In the past,many CPSs have been built and applied.Unfortunately,we are still unable to validate CPSs with enough degree of rigor.Without advances in the modeling,analysis, and veri fi cation of CPS components,the fl awed and even dangerous CPSs will continue to be used.Our safety and security depends on our ability to make CPS engineering discipline as rigorous as mathematics while making analysis solutions effective enough to reduce its deployment cost.We need to construct the theory and tools required to assure the safety,security,and operational characteristics of CPSs. The main constraints and challenges of CPSs are summarized below[7,22-24]:
1)Mathematics and formal models.Lack of adequate mathematics and formal models to specify the behavior imposed by digital controls on analog systems.For example,computing,communication,and physical dynamics of CPS must be abstracted and modeled at different levels of scale,locality, and time granularity.
2)Control of hybrid systems.A new mathematical theory must merge event-based systems with time-based systems for feedback control.This theory also must be suitable for the hierarchies involving asynchronous dynamics at different time scales and geographic scopes.
3)Real-time abstraction.To ensure fault tolerance,scalability and optimization of CPS,the real-time embedded systems abstractions and computational abstractions ask for new resource allocation schemes,new distributed real-time computing and real-time group communication methods.Time and spatial information need to be explicitly captured into programming models.Other physical and logical properties, such as physical laws,safety,or power constraints,resources, robustness,and security characteristics,should be captured in programming abstractions.
4)Robustness.Uncertainty in the environment,security attacks,and errors in physical devices and in wireless communication impose a critical challenge to ensure overall system robustness,security and safety.Unfortunately,it is one of the least understood challenges in CPSs.
5)Knowledge engineering.We need to represent the myriad types of data and application contexts in different physical domains,and interpret them under the appropriate contexts. Machine learning and real-time stream data mining will deal with more distributed,dynamic,heterogeneous information sources of CPSs.
In the future,those challenges should be overcome,resulting in CPS science and its new solution that will make CPS deployment practical,affordable,and reliable.
C.Cyber-physical-social System
Currently,most research of CPS still focuses on the complexity of engineering elements.In fact,the social complexity of CPS is not ignorable or even decisive at all stages.For example,the physical system and its cyber system of CPS are designed,built and used by human beings in their social and natural environments,the social system must be of the same importance as its CPS;these indivisible three parts(cyber, physical,and social system)constitute the entity named as cyber-physical-social system(CPSS)[3].
”Human centered CIMS(computer integrated manufacturing system)”is researched by Xiong as early as in 1996[25]. Several international researchers have the similar opinions. Qiao et al.explicitly considered human factors in the design and evaluation of cyber-transportation systems(CTS)safety and operations[26],which takes a multi-disciplinary approach that combines cyber technologies,transportation engineering and human factors.Mirchandani gives three important aspects in designing CPS based transportation[27]:the physical system that is governed by the physics of transportation system, like multi-modal traf fi c fl ow,travel behavior,latencies;the cyber system that is governed by the distributed computing and communications;and the social system,whose dynamics is governed by human organization and behavioral decision-making.Gowrishankar et al.[28]argues that insuf ficient progress has been made to fully embrace the inherently social components of transportation system,and claims that by explicitly incorporating people,transportation cyber social physical systems(CSPS)will offer new opportunities for ef fi cient sensing and control of transportation systems.Wu investigates the relationship between social informatics and transportation CPS[29].Social informatics studies the sociobehavioral perspective of individuals or communities via information and communication tools,potentially under different cultural contexts.
1)CPSS De fi nition:The de fi nition of CPSS:a kind of common complex system that is constituted by a physical system,and its social system including human beings,and the cyber system that connects both of them(Fig.2).Normally,sensor network connects physical system and its cyber system, social sensor network connects social system and its cyber system,and then the physical and social system can be mapped equivalently to their cyber systems.On this basis,physical& social system and their cyber systems can understand each other,their stepwise interaction helps improve each other,and gradually the effective control and safe,reliable and ef fi cient operation of CPSS will be realized.
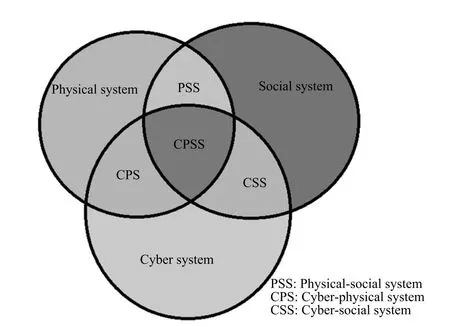
Fig.2.Scopes of CPSS.
2)Research Target and Contents of CPSS:CPSS research targets:with in-depth analysis and understanding of the dynamic evolution mechanism of CPSS’s complex behavior in the main scenarios,we can improve the perception,analysis and control ability of those complex CPSSs,and their effective control and the safe,reliable and ef fi cient operation can be achieved.CPSS is going to have a profound impact on the basic research and application of complex systems in China, thus has signi fi cant value.To meet the requirements of national major strategic areas,including transportation,energy and manufacturing,the common basic theory and technology of CPSS should include:
a)Hybrid modeling theory and methods with multiple scales
They include:Hybrid model research and design with multiple scales of CPS-based on physical sensor network;Data driven agent model research and design of CSS based on social sensor network;Cyber system building mechanism driven by big data under cloud computing environment,including speci fi c problem or scene oriented models of personnel,organization and society,and data driven behavior and psychology computational models;the architecture research,design and analysis of CPSS that is composed of CPS and CPSS;building method of cyber system.
b)Behavior analysis and control
The computational experiment’s design and analysis method should be found for exploring CPSS behavior evolution mechanism.CPSS behavior analysis,behavior induction,and control plan assessment should be researched by using the computational experiment results.Based on CPSS behavior analysis results,the scrolling optimization method of CPSS should be found through the progressive interaction between physical plus social system and its cyber system,to collaboratively achieve the control target:the control mechanism and control algorithms of CPSS to achieve the reliable and ef fi cient operation and optimization target in normal situation; the emergency control mechanism and control algorithms of CPSS in abnormal situation;the pilot platform for application veri fi cation,its comprehensive security design,behavior analysis and control plan validation study and recommendation.
Unfortunately,thetraditionalmathematicalmodeling method cannot help the modeling of social systems,like people’s behavior and mind,weather and environment,etc. The traditional control theory and system cannot meet the control and management requirement of complex CPSS.So, the novel methodology,theory and system must be introduced.
III.ACPBASEDPARALLELCONTROL ANDMANAGEMENT OFCPSS
A.Control and Management Problem of Complex CPSS
In the 1990s,Mr.Hsue-shen Tsien and other Chinese scholars like Dai et al.,proposed some important thoughts and methods relevant to complex systems,like“Open complex giant system”and“Hall for workshop on meta-synthetic engineering(HWMSE)”[30-31].To effectively carry out management and control of complex CPSS,the main challenges are listed as below:cyber networks in the information domain,mental elements in the cognitive domain,and social networks in the social domain.Thus,the concepts behind CPSS raise challenging issues,like:what kind of new control methodology can control the chain from human mentality to physical systems effectively.Any study of CPSS must be conducted with a multidisciplinary approach involving the physical,social,and cognitive sciences.AI-based intelligent system will be the key to any successful construction and deployment.
B.ACP Methodology
In recent years,Wang proposed ACP(arti fi cial systems, computational experiments,and parallel execution)methodology(Fig.3)[32-34],which is a kind of computational control of complex system.The preliminary application pilots in transportation,petrochemical production and military fi eld have achieved good results[35-38],and proven that ACP possibly is one general and effective solution for the behavior analysis, control and management of the complex systems consisting of engineering complexity and social complexity elements.
Basically,ACP methodology consists of three steps:modeling and representation with arti fi cial systems;analysis and evaluation by computational experiments;control and management through parallel execution between actual system and arti fi cial system.So,ACP methodology is a coordinative research and systematic effort,for the purpose of modeling, analysis,and control of CPSSs,which is too complex to deal by using traditional approaches.
1)Modeling of Arti fi cial Systems:The modeling of arti ficial systems aims to extend and apply social science theory to develop computational models of individual,organizational, and social behavior,and use multi-agent techniques to bridge between and map from social theories and computational representations.
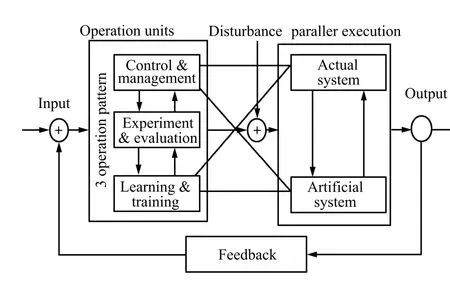
Fig.3.ACP-based parallel control and management for CPSS.
The main research contents of arti fi cial systems of CPSS are:Bottom-up agent-based modeling techniques with speci fi c emphasis on individual and social behavior,including model construction,simpli fi cation,veri fi cation,interaction design, etc.;Behavior at different abstraction levels and rules of encounters;High-resolution,high- fi delity capturing of social and environmental contexts;Social strati fi cation theory and its computational extensions;Dynamic evolution of social groups, and emergence and re fi nement of social norms and social coordination mechanisms;Social group formation through complex network theory and information and opinion/emotion dissemination through online communities;Structures of social groups and their impact on system-level robustness and stability;Calibration of parameters specifying agent and social behavior and capabilities,etc.
2)Computational Experiments:Computational experiment is based on multi-agent simulation and aims to study various mechanism design and policy issues through agent interaction and observation of emergent behavior,and uncover various properties of social behavior and organizational principles through social learning.
The key research areas of computational experiments of CPSS:Social sensor network theory and development;Social science foundation of social learning and related knowledge representation issues;Formalizing and learning social behavior,interactions and organizing principles;Developing computational experimental toolkits by using agent-based data mining techniques;Large-scale multi-agent simulation techniques designed for speci fi c social computing application contexts; Evaluation framework,etc.
3)Parallel Execution:Parallel execution is an implementation and adaptation approach to examine co-evolution of the real-world physical-social system(PSS)and its virtual counterpart in the arti fi cial systems(i.e.,cyber system),providing continuous feedback and model re fi nement/correction for policy evaluation and establishing linkage between the realworld effectors and training systems.
The key research areas of parallel execution of CPSS: Interaction and information exchange protocol design for agents within the arti fi cial systems,and for agents and the environment;Formalization of information and control signal exchanges between PSS and its arti fi cial systems;Multiresolution system optimization and design for interactions between actual and arti fi cial systems;Order-based optimization methods for parallel system,etc.
C.ACP-based Parallel Control and Management System of CPSS
CPSS,which is integrated with physical world,cyberspace, and human society,involves cyberspace,physical space,human knowledge,mental capabilities,and socio-cultural elements.So,the aforementioned simulation methods and platforms,based on the mathematical models and the assumptions of the actual systems,cannot reproduce and describe most factors or scenes of actual systems.Then,ACP-based parallel control and management system becomes a simulation-like novel system for the control and management of CPSS.
ACP-based parallel control and management system of CPSS has four levels:Fundamental component level is its foundation,which takes the pre-de fi ned basic components as its program components;Data and knowledge level is the core, whose control and management models are denoted as model algorithms library,and expert knowledge base;Computational experiment level is the function realization module,which can achieve the evaluation and decision support of control and management programs by experiments design,execution and analysis;Parallel execution level is a layer for function display and user interface,which can execute control and management of CPSS information exchange and feedback.
D.Architecture and Supporting Technologies of CPSS
The architecture and supporting technologies of CPSS are shown as Fig.4.The supporting technologies of CPSS includes:linguistic dynamic system(LDS)[39-41],agentbased control(ABC)[42-43],adaptive dynamic programming (ADP)[44-47],high performance cloud computing,and other novel technologies like IoT,big data,etc.
1)Agent-Based Control(ABC):The most important issue of social systems of CPSS is human being.So,we take human being as example of agent based control.Agent’s attributes include:basic attributes such as age,gender,profession,house location,and work location,etc.;driving-related attributes such as maximum speed,minimum safe distance,activity plan,and vehicles,etc.
According to the survey of residents travel experience, residents travel questionnaire usually contains the following three areas:a)individual and family attributes:population, address,number of trips,career,etc.;b)social and economic attributes:household income,personal income,living conditions,transport type and number;c)travel attributes:trip mode, trip time,trip number,start and end point of each trip,trip purpose,transportation mode,and so on.
Assuming thejth day travel forAijactivity of individualican be expressed as:

whereATij,Lij,STij,ETij,ADij,Mijdenotes the type,the site,the start time,the end time,the length of time,and the trip mode ofjth activity of individuali,respectively.
Some rules of agents are as follows:

Fig.4.The architecture and supporting technologies of CPSS.
Rule 1.agent’s age
The value range of agent’s age is(0,100),divided into 20 groups.The proportion of the groupiin total population ispi,and=1.Population structure is dependent on age distribution,and can be classi fi ed into increasing type,static type and decreasing type.
Rule 2.agent’s character
Agent’s character falls into three types,fast,medium and slow.It in fl uences the maximum speed,acceleration speed and deceleration speed of agent.
Rule 3.agent’s learning(exploring new route)
The exploring ability falls into large,medium,and little.It in fl uences agent’s route choice.
Rule 4.rule of marriage
Among all the unmarried agents,one male agent above 25 years old and one female agent above 23 years old are combined to be a new family with probabilityp.
Rule 5.rule of birth
Among the married agents,the couple,who have no children and the female below 49 years old,can bear a child.The gender of the child is randomly determined.
Rule 6.rule of death
The death probability meets“J”shaped distribution.

whereqxdenotes the probability of death whenx-year-old agent is beforex+1-year-old,anda1,a2,a3,b1,b2,care constants.
Rule 7.activity place selection
Mandatory activities sites such as work,school,and home are generally fi xed.The other activity sites use entropy models:

wherePj‖iindicates the probability thatith site is selected as the site ofjth activity;Dijdenotes the distance between sitesiandj;Cjrepresents the area ofjth site.
Rule 8.travel mode
Three types:by car,by bike,on foot.
Means of transportation is one of basic attributes of agent. Agent chooses travel mode with a certain proportion in the optional range.

wherePindicates probability that an agent takes thekth type of activity;αk,βkare the coef fi cient corresponding to thekclass activities.
2)Linguistic Dynamic Systems(LDS):LDS exist in the analysis and control of many complex CPSSs.For example, during the course of making control strategy or rule for a complex problem,sentences or words are generally used to describe problems,present situations,propose objectives, make strategies,and de fi ne and execute evaluation programs. The process can be seen as a course of linguistic dynamics.
The state equation model of LDS is as follows:

The output equation of LDS is:

The feedback control equation of LDS is

whereIN,IM,Ip,Iqare hypercubes,Z=(0,1,...)is a set of non-negative integers,andXk∈IN,Yk∈IM,Uk∈IPrespectively represent system status word,output word,control word and the input(command)word,respectively,andF,H,Rare the fuzzy logic operators,which can be simple If-Then rules,more complex higher-order logic operations or mixed logic calculation.These de fi ne the evolution,output and control mapping or relationship of LDS.
3)Adaptive Dynamic Programming(ADP):ADP usually consists of three modules:evaluation module(critic),model module(model),and the control module(action).Model module and control module are the traditional system model and controller.The performance evaluation functionJ(t)is the output of evaluation module.The training error is de fi ned as

where 0<γ<1 is discount factor,ris reward function (reinforcement signal),which can be used to evaluate whether the control action is good or bad.Assuming the error tends to zero,the evaluation module can be obtained recursively:

The instantaneous utility function is:

E.The Advantages of ACP Approach
The main motivation behind employing ACP is the lack of timeliness, fl exibility,and effectiveness in the current operation management systems in complex systems.The ACP approach represents a breakthrough from existing methods for control and management of complex systems[33].
Its underlying assumption is that the human capacity for modeling,analyzing,and predicting in complex systems is fundamentally limited.In many cases,what we are trying to do is to predict the unpredictable.The contradiction can be solved only along some new dimensions of thinking.In the ACP approach,this new dimension is a possibility instead of determinism or probability,as in current analytic reasoning. In other words,we emphasize the psychological effects in dealing with complex systems,and the ACP approach provides a computational platform for realizing this emphasis.
The ACP framework can incorporate many existing techniques.Particularly,this framework enables:
1)Scienti fi c applications of game techniques.
2)Continuous,systematic utilization of simulation techniques during the whole life cycle of complex systems,instead of limited applications during design and preconstruction.
3)Computational experiments that employ statistical analysis and pattern discovery to investigate the future of complex systems,instead of purely statistical approaches based on historical data and past experiences.
Clearly,AI methods and computational-intelligence algorithms will be critical to the ACP approach’s success in solving the real-world problems of complex systems.
With support from research agencies and industries,researchers have applied the ACP approach to the control and management of complex systems for fi elds such as energy production[48],petrochemical processes[49],agriculture,emergency management[50],and socioeconomic[51]studies.
IV.CASESTUDY FORCPSS-BASEDTRANSPORTATION
It is well known that CPS-based industry is called as”Industry 4.0”.Similarly,here we call CPSS-based transportation”Transportation 5.0”,or”ITS 5.0”.Urban transport is a typical representative of CPSS,which relates to the two aspects of complex systems,i.e.,engineering complexity elements and social complexity elements.Traf fi c engineering complexity elements include transportation infrastructure(such as roads, bridges,and parks),traf fi c control systems and other elements; Traf fi c social complexity elements include traf fi c participants (passengers,drivers,pedestrians and others),climate,environment,culture and management.It has dynamic,open, interactive and autonomic features.With the help of the novel ICT technologies,traf fi c cyber systems become more and more powerful,and then to upgrade ITS to”ITS 5.0”,as shown in Fig.5.
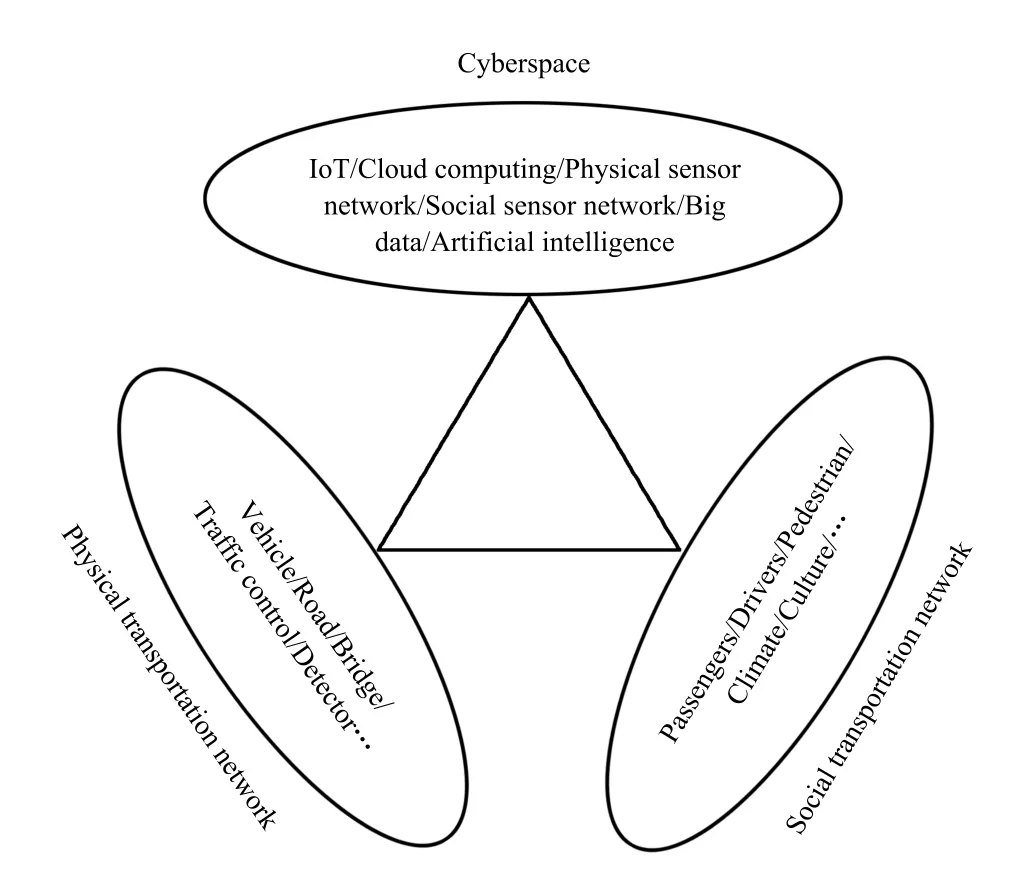
Fig.5.CPSS-based intelligent transportation system.
ITS 5.0 has a realistic demand and can provide the basic conditions to study the scienti fi c issues,i.e.,traf fi c behavior analysis and control.To give deeper insights into CPSS-based ITS 5.0,we will discuss more details,including physical transportation system,social transportation system,future research directions,and then demonstrate ITS 5.0 ideas by using internet of smart vehicles as prototype.
A.Physical Transportation System
There are 3 layers in the system(Fig.6).
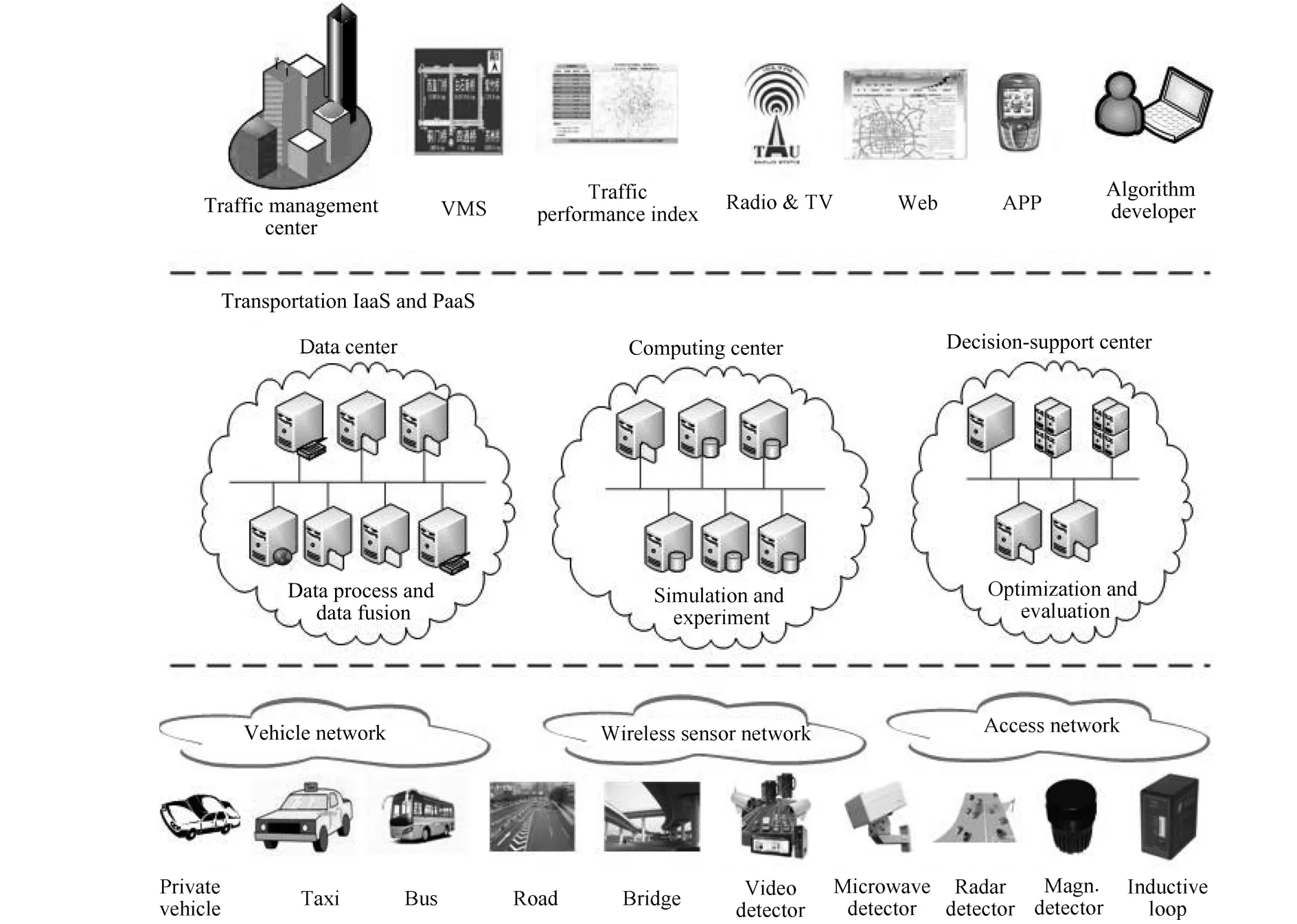
Fig.6.Physical transportation system.
The lowest layer is the data collection layer,which collects real-time traf fi c information.The detectors include video detector,microwave detector,radar detector,magnetometer detector,inductive loop,and so on.These detectors collect traf fi c information from various vehicles,infrastructure,and environment.There are mainly two types of data source.One is static, such as detectors that are installed on road or roadside,they can only collect data with a fi xed scope and the data can be sent to remote center by access network.The other is dynamic, such as the detectors that are installed on vehicles.Usually, the hosting vehicles can connect with each other to form vehicular networks.The collecting scope of these detectors is dynamic and covers as much area as the vehicle can reach. Dynamic detectors communicate with data center through wireless sensor network.There are a lot of communication protocols that are speci fi ed for transportation data collection, among which WAVE/802.11p and ZigBee/802.15.4 are two typical protocol stacks.They are widely applied in high-speed and low-speed scenarios.By collecting traf fi c information from both static and dynamic detectors,the operating status of the whole city’s traf fi c can be measured and monitored in detail and in real time.
The middle layer is the core of the system,which is built upon cloud platform,i.e.,transportation IaaS(infrastructure as a service)and PaaS(platform as a service).There are 3 platforms in this layer.The fi rst is data center,which possesses large storage capability.The main task of data center is data processing and data fusion by transferring various data sources into the uni fi ed internal format.The second is computing center,where arti fi cial traf fi c scenarios grow up and management and control experiments are carried out by interacting with these scenarios.The third is decision-support platform,where optimal plans and experimental procedures are selected and the experimental reports are generated by statistical analysis and comparison.
The upper layer is transportation SaaS and all the applications are packaged into location-based services based on intelligent traf fi c cloud.Using intelligent traf fi c cloud,complex computing and massive data storage can be implemented on cloud servers,and high performance and high reliability can be achieved with low cost.The design principle is also called as”local simple,remote complex”[39].Service consumers of intelligent transport cloud include travelers,traf fi c managers and algorithm developers.The location-based services provided by the system include public transport transfer,predicting bus arrival time,calling or booking a taxi,traf fi c guidance and congestion avoidance,etc.
B.Social Transportation System
With the emerging of social network sites,social media, and social applications,people are connected more and more closely,and now it is easier to share and obtain useful information than ever before[52-53].Consequently,traf fi c cyber-social system(CSS)has an increasing in fl uence over individual’s travel decision and behavior.As an important part of ITS 5.0, social transportation system is built upon CPSS and aims to integrate and spread travel-related information and resource from multiple sources effectively.Fig.7 illustrates the architecture of social transportation system.The public can use it torelease or acquire travel-related information according to their demands,and transportation-related departments can adopt more detailed management through the increasing intelligent devices,like mobile phones.

Fig.7.Social transportation system.
Social transportation system is deployed on cloud platform, so that everyone and related organizations can take part in easily with the traditional Internet or mobile Internet.The information that social transportation system collects can be divided into four categories:1)emergency events,like traf fi c and subway accident;2)guidance information,like traf fi c congestion and road networks;3)travel-related information, like new marketplaces and joint travel notice;4)sharable travel resource,like car-sharing and car-borrowing.Such information can be selected and sent to the public or members in individual’s social networks or subscribers.The travelrelated information may affect individual’s travel decision and behavior from different aspects,such as travel destination selection,travel route choosing,travel mode choosing,and travel plans(cancel planned travel or choose new travel).
On the other hand,social transportation system can also be treated as a special kind of social sensor network.Transportation management departments can use it to capture social emergency events,policy feedback,and traf fi c sentiment, which can support related decision making and improve the service level of the whole transportation system.Clearly the implementation of social transportation network must depend on the emerging advanced concepts,methods and technologies,such as big data,cloud computing and mobile internet.
Currently,there are already some notable attempts of implementing social transportation system in the developed countries.Uber is a famous mobile phone application to help people get a taxi,private car or rideshare.Waze is a communitybased traf fi c and navigation application to help people join other drivers in the same area who share real-time traf fi c and road information,save everyone’s time and gas cost on their daily commute.Both of them are successful practices of social transportation system.
C.Transportation 5.0:CPSS-based Transportation Systems
We believe that physical transportation system must be merged with social transportation system by adding and addressing the human and social dimension into CPS.This is largely due to the unprecedented sphere and speed of in fl uence experienced in the cyber-space fi eld and its profound impact on the way we behave and interact with each other.We have reached the point where social and human dynamics must be considered as an integral part of any effective transportation system design and operation,thus inserting the term social into physical transportation systems is fully and rightfully justi fi ed[3].Obviously,the merging result will promote current ITS into higher level and wider perspective and we call it CPSS-based transportation system,which is the main characteristic of Transportation 5.0.
CPSS-based transportation system promises a scenario involving parallel universes where a real system and its arti fi cial counterparts are always running in parallel and interactively through cyberspace.This kind of cyberspace-enabled parallelism could open a range of new application scenarios,such as future driving in intelligent transportation spaces for more integrated and better traf fi c management,vehicular safety, energy ef fi ciency,reduced pollution,and maintenance services. In this world,vehicles,highways,roads,intersections and operation centers will be embedded with various types of intelligent spaces, fi xed,mobile,mixed,hybrid,and so forth.
We believe that the potential and future of ITS 5.0 is bright and unlimited.Although,CPS-Based ITS has greatly improved the situation,there is still much room for improvement. As often discussed,researchers are still facing the question”Where is the intelligence in ITS?”The application of an ACP approach in transportation problems will signi fi cantly enhance and improve the reliability and performance of current CPS-based ITS technology.In addition,it will provide an effective platform and an important vehicle to facilitate use of almost all the concepts and methods developed in the fi elds of AI and computational intelligence and thus inserting true intelligence in ITS[34].Several systems of Transportation 5.0 have been established and signi fi cant effects have been achieved in public transportation scheduling and evacuation in large events[54,55], urban rail transportation systems management[56],high-speed railway systems management[57],urban traf fi c signal control optimization[58],etc.
However,ITS 5.0 is still in its initial stage,extensive investment,support and involvement are needed for its development. Some typical research directions in this area are shown in the following:
1)Hybrid,Multi-scale Models,and Platforms:The research directions include:the data acquisition and data fusion technologies for traf fi c engineering complexity elements using physical sensor network;the data acquisition and data fusion technology for traf fi c social complexity elements by using social sensor network;the building and veri fi cation of behavior mechanisms,behavior models of social elements in CPSS-based traf fi c system;the analysis and veri fi cation of behavior mechanisms and behavior models in the human-vehicle mixed scenarios in CPSS-based traf fi c system;The analysis and veri fi cation of the multi-scale,full-feature,hybrid complex dynamical network models of CPSS-based traf fi c system; the design,analysis and authentication of the full-feature architecture of CPSS-based traf fi c systems;the building of cyber systems in CPSS-based traf fi c systems based on cloudcomputing and big data.
2)Computational Experiments and Behavior Analysis:The research directions include:computational experiment design method for the cyber system of CPSS-based traf fi c system,to meet the traf fi c challenging requirements,like security,reliability,green feature,and ef fi ciency;computational experiment and results analysis of the mechanism,such as vehicles behavior evolution,personal behavior evolution,human-vehicle mixed behavior evolution,and control and management plans in CPSS-based traf fi c system.
3)Control and Veri fi cation of Behaviors:The research directions include:the control of personal behavior,vehicle behavior,human-vehicle mixed behavior in CPSS-based traf fi c system;parallel control and management of CPSS-based traf fi c systems;the deployment and veri fi cation CPSS-based traf fi c systems based on the construction of IoT infrastructure,which should be constrained in the limited time and space dimension to guarantee the application’s success.
D.Case Study:Internet of Smart Vehicles and Intelligent Driving
Intelligent vehicles,especially technologies emerged from autonomous vehicles,are key technologies to improve traf fi c safety and ef fi ciency in the next generation ITS 5.0.By accessing the transportation cloud services with V2I and V2V communication,the vehicle will expand its functions by CPS and CPSS extensions.As a part of CPSS-based ITS 5.0,CPSS-based intelligent driving system(IDS)includes intelligent vehicles,traf fi c management and control,arti fi cial transportation and cloud computing technologies.The cloud computing assists ACP systems to offer a kind of cyberspace-enabled parallelism that could open a wide range of new application scenarios,such as driving in intelligent transportation spaces, better traf fi c management and vehicular safety.
People’s transportation needs and other social information are brought to the CPSs enabled IDS,which will improve the vehicle’s autonomy level and build a solid foundation of the next generation ITS.The human factors,human driver experiment,behavioral analysis and modeling are introduced, especially the personal travel style,tools choices,objective destination,and information from mobile navigation devices, such as objective travel path,hot searched spots,etc.In the microscopic level,the combination information of social and physical sensing systems can reduce the traf fi c environment perception dif fi culties,and the data sensing,computing,fusion, communication and networking can improve the intelligence of the vehicles.The intelligent intersections,emergency vehicle real time navigation,IDS and autonomous driving,could be implemented.And therefore,intersection designs for traffi c control and emergency transportation operation are more intelligent in this new generation ITS.
Intelligent vehicles access to the transportation cloud services by V2I communication channel extend its functions with the knowledge obtained by the parallel execution of arti fi cial transportation system and real traf fi c system.For example,it is still complicated for autonomous vehicle to navigate through complex traf fi c environment like crowded intersection.The transportation cloud can be used to model and label this environment with previous sampling or other unmanned ground vehicles(UGV)perception.The results can guide and help other vehicles travel through the intersection.Our proposed method addresses the problem of unknown road disturbance and introduces a practical method that utilizes a cloud-based system as well as V2V infrastructure.The introduced method for resolving the aforementioned problem with unknown road disturbance uses a cloud-based database of road pro fi les to get the most recently updated information about the road. Furthermore,communication with other vehicles via V2V protocols helps gathering local information of the road.
A CPSS-based IDS exhibits a layered structure(Fig.8). In this approach,driver agents are running on the controlled vehicles,road section manager agent is installed on the roadside or intersection.Personal agents with travel needs are also included.As Fig.8 shows,the driver agents and personal agents could“call ahead”and attempt to reserve a block of space-time in the road section.The transportation related CPSS will do the data fusion,computing and communication, providing information to the traf fi c managers.The traf fi c manager decides whether to grant or reject requested reservations according to the traf fi c simulation results.When the request is granted,the manager will send the driver agents a special fi le as travel guidance.Otherwise,they will negotiate until the travel is arranged.
The traf fi c manager will simulate the travel with cloud computing and send the travel guidance results to the vehicles.This request and answer mechanism ensures the traffi c active control,and improves traf fi c safety and ef fi ciency in complex environment such as congested road section and intersections.Meanwhile,there are several bene fi ts of communication-enabled cooperative safety applications over purely autonomous safety systems,such as line-of-sight detection is not required,vehicle status can be shared with others rather than estimated by expensive vehicle mounted sensors; the cost of positioning and communication is signi fi cantly less than the autonomous sensing equipment;vehicles can coordinate maneuvers for safety goals.The personal agents’movements in critical sections like intersections are simulated and therefore the safeties are guaranteed.
The objective to develop a CPSS supported intelligent vehicle becomes possible.It provides a continuum of options between“driver in total control of the vehicle”and“autonomous drive”,robustly guarantees passenger safety,during design,with respect to uncertainty in driver behavior and road friction coef fi cient,provides guarantees for statistically dangerous scenarios with the quanti fi ed uncertainty in driver behavior and road friction coef fi cient,and achieves high confi dence safety through sensing and control for the quanti fi ed uncertainty.
V.DISCUSSION ANDCONCLUSION

Fig.8.CPSS-based intelligent driving system architecture overview.
It is not long since the CPSS concept was proposed. However,there are fruitful achievements in both research and application.In 2010,a new department,CPSS,is founded inIEEE Intelligent Systems,and“CPSS-based transportation”is one of the core directions in this department.The ACP approach has been proven to be the effective framework and scienti fi c foundation for the management and control problems of CPSS.The theoretical research results of CPSS and ACP methodology are also applied and veri fi ed in traf fi c areas such as management plan optimization,large-scale evacuation,and public traf fi c scheduling.We will research CPSS further,and continue its application practices in areas such as transportation,manufacturing,etc.
ACKNOWLEDGMENT
Professor Fei-Yue Wang guides the research work of the paper’s authors.The authors thank the reviewers for their helpful comments.
REFERENCES
[1]Cyber-physical system:from Wikipedia,the free encyclopedia.http://en. wikipedia.org/wiki/Cyber-physical system,October 13,2014.
[2]US National Science Foundation.Cyber-Physical Systems(CPS),NSF 08-611[Online],available:http://www.nsf.gov/pubs/2008/nsf08611/ nsf08611.htm,October 13,2014.
[3]Wang F Y.The emergence of intelligent enterprises:from CPS to CPSS.IEEE Intelligent Systems,2010,25(4):85-88
[4]Smirnov A,Kashevnik A,Shilov N,Makklya A,Gusikhin O.Contextaware service composition in cyber physical human system for transportation safety.In:Proceedings of the 13th International Conference on ITS Telecommunications.Tampere,Finland,IEEE,2013.139-144
[5]Wu P L,Raguraman D,Sha L,Berlin R B,Goldman J M.A treatment validation protocol for cyber-physical-human medical systems.In:Proceedings of the 40th EUROMICRO Conference on Software Engineering and Advanced Applications(SEAA).Verona:IEEE,2014.183-190
[6]Gelenbe E,Gorbil G,Wu F J.Emergency cyber-physical-human systems.In:Proceedings of the 21st International Conference on Computer Communications and Networks(ICCCN).Munich:IEEE,2012.1-7
[7]Shi J H,Wan J F,Yan H H,Suo H.A survey of cyber-physical systems. In:Proceedings of the 2011 International Conference on Wireless Communications and Signal Processing(WCSP).Nanjing:IEEE,2011. 1-6
[8]Wan K Y,Man K L,Hughes D.Towards a uni fi ed framework for cyberphysical systems(CPS).In:Proceedings of the 1st ACIS International Symposium on Cryptography and Network Security,Data Mining and Knowledge Discovery,E-Commerce and Its Applications and Embedded Systems(CDEE).Qinhuangdao:IEEE,2010.292-295
[9]Stojmenovic I.Machine-to-machine communications with in-network data aggregation,processing,and actuation for large-scale cyber-physical systems.IEEE Internet of Things Journal,2014,1(2):122-128
[10]Derler P,Lee E A,Vincentelli A S.Modeling cyber-physical systems.Proceedings of the IEEE,2012,100(1):13-28
[11]Tan Y,Vuran M C,Goddard S.Spatio-temporal event model for cyber-physical systems.In:Proceedings of the 29th IEEE International Conference on Distributed Computing Systems Workshops.Montreal, QC:IEEE,2009:44-50
[12]Thacker R A,Jones K R,Myers C J,Zheng H.Automatic abstraction for veri fi cation of cyber-physical systems.In:Proceedings of the 1st International Conference on Cyber-Physical Systems.New York:IEEE, 2010,12-21
[13]Bujorianu M C,Bujorianu M L,Barringer H.A unifying speci fi cation logic for cyber-physical systems.In:Proceedings of the 17th Mediterranean Conference on Control and Automation.Thessaloniki:IEEE, 2009.1166-1171
[14]Hanz T,Guirguis M.An abstraction layer for controlling heterogeneous mobile cyber-physical systems.In:Proceedings of the 2013 IEEE International Conference on Automation Science and Engineering.Madison, WI:IEEE,2013.117-121
[15]Cyber-physical systems:Uplifting Europe’s innovation capacity[Online],available:http://ec.europa.eu/digital-agenda/en/news/h2020-ict-2014-1-call-proposals-smart-cyber-physical-systems,October 13,2014.
[16]Bradley J M,Atkins E M.Toward continuous state-space regulation of coupled cyber-physical systems.Proceedings of the IEEE,2012,100(1): 60-74
[17]Suresh M A,Stoleru R.Towards Cyber-Physical Security of Flow-based CPS,2014 National Workshop on Transportation Cyber-Physical Systems[Online],available:http://cps-vo.org/sites/default/ fi les/webform/.pdf,October 13,2014.
[18]Borrelli F,Hedrick J K,Bajcsy R.High con fi dence active safety control in automotive cyber-physical systems.University of California-Berkeley [Online],available:http://cps-vo.org/node/1429,October 13,2014.
[19]Platzer A.Veri fi cation of cyber-physical transportation systems.IEEE Intelligent Systems,2009,24(4):10-13
[20]Ghasemalizadeh O,Taheri S.Hybrid could-based platform to improve ride metrics of vehicles.Virginia Polytechnic Institute and State University[Online],available:http://cps-vo.org/node/12614,October 13,2014.
[21]Diggavi S N,Srivastava M,Tabuada P.Security in transportation systems [Online],available:http://cps-vo.org/node/11230,October 13,2014.
[22]Kim K-D,Kumar P R.Cyber-physical systems:a perspective at the centennial.Proceedings of the IEEE,2012,100(Special Centennial Issue):1287-1308
[23]Sha L,Gopalakrishnan S,Liu X,Wang Q X.Cyber-physical systems:a new frontier.In:Proceedings of the 2008 IEEE International Conference on Sensor Networks,Ubiquitous and Trustworthy Computing.Taichung: IEEE,2008.1-9
[24]Lee E A.Cyber Physical Systems:Design Challenges.University of California at Berkeley,USA,Technical Report UCB/EECS-2008-8. January 23,2008.
[25]Xiong G,Xu X M,Zhang Z J.Human Centered CIMS.Systems Engineering-Theory Methodology Applications,1996,5(3):1-6(in Chinese)
[26]Qiao C M,Sadek A W,Hulme K,Wu C.Addressing design and human factors challenges in cyber-transportation systems with an integrated traf fi c-driving-networking simulator.In:Proceedings of the 2010 Developing Dependable and Secure Automotive Cyber-Physical Systems fromComponents Workshop.[Online],available:http://varma.ece.cmu.edu/ Auto-CPS-2011../Papers/Qiao,%20Chunming.pdf,October 13,2014.
[27]Mirchandani P.Next generation multi-modal traf fi c management systems:Cyberphysical challenges[Online],available:http://cps-vo.org/ node/11263,October 13,2014.
[28]Gowrishankar S,Stern E R,Work D B.Including the social component in smart transportation systems[Online],available:http://cps-vo.org/ node/11289,October 13,2014.
[29]Wu S F.On leveraging social informatics for transportation cyberphysical systems[Online],available:http://cps-vo.org/node/11290,October 13,2014.
[30]Qian X S.A new discipline of science-the study of open complex giant system and its methodology.Urban Studies,2005,12(5):1-8(in Chinese)
[31]Dai R W,Cao L B.Research of hall for workshop of metasynthetic engineering.Journal of Management Sciences in China,2002,5(3):10-16(in Chinese)
[32]Wang F Y.Arti fi cial societies,computational experiments,and parallel execution:an investigation on computational theory of complex socialeconomic systems.Complex Systems and Complexity Science,2004, 1(4):25-35(in Chinese)
[33]Wang F Y.Toward a paradigm shift in social computing:the ACP approach.IEEE Intelligent Systems,2007,22(5):65-67
[34]Wang F Y.Parallel control and management for intelligent transportation systems:concepts,architectures,and applications.IEEE Transactions on Intelligent Transportation Systems,2010,11(3):630-638
[35]Hu Y L,Wang F Y,Liu X W.ACP-based research on evacuation strategies for high-rise building fi re.Acta Automatica Sinica,2014, 40(2):185-196(in Chinese)
[36]Duan W,Cao Z D,Wang Y Z,Zhu B,Zeng D J,Wang F Y,Qiu X G,H Song B,Wang Y.An ACP approach to public health emergency management:using a campus outbreak of H1N1 in fl uenza as a case study.IEEE Transactions on Systems,Man,and Cybernetics Part A: Systems and Humans,2013,43(5):1028-1041
[37]Huang W D,Wang W,Xu X,Xi X N.Computational experiments for abort planning of manned lunar landing mission based on ACP approach.Acta Automatica Sinica,2012,38(11):1794-1803(in Chinese)
[38]Wang F Y,Wong P K.Intelligent systems and technology for integrative and predictive medicine:An ACP approach.ACM Transactions on Intelligent Systems and Technology,2013,4(2):32-38
[39]Wang F Y,Zhang H B.A computational approach for linguistic dynamic systems and its application to hybrid control systems.In:Proceedings of the 1996 IEEE International Conference on Systems,Man,and Cybernetics.Beijing:IEEE 1996.2613-2618
[40]Mo H.Linguistic dynamic orbits in the time varying universe of discourse.Acta Automatica Sinica,2012,38(10):1585-1594(in Chinese)
[41]Wang F Y,Lin Y,Pu J B.Linguistic dynamic systems and computing with words for complex systems.In:Proceedings of the 2000 IEEE International Conference on Systems,Man,and Cybernetics.Nashville, TN:IEEE,2000.2399-2404
[42]Wang F Y.Agent-based control for networked traf fi c management systems.IEEE Intelligent Systems,2005,20(5):92-96,
[43]Wang F Y.Agent-based control for fuzzy behavior programming in robotic excavation.IEEE Transactions on Fuzzy Systems,2004,12(4): 540-548
[44]Murray J J,Cox C J,Lendaris G G,Saeks R.Adaptive dynamic programming.IEEE Transactions on Systems,Man,and Cybernetics, Part C:Applications and Reviews,2002,32(2):140-153
[45]Wang F Y,Zhang H G,Liu D R.Adaptive dynamic programming:An introduction.IEEE Computational Intelligence Magazine,2009,4(2):39-47
[46]Wang F Y,Jin N,Liu D R,Wei Q L.Adaptive dynamic programming for fi nite-horizon optimal control of discrete-time nonlinear systems withεerror bound.IEEE Transactions on Neural Networks,2011,22(1):24-36
[47]Liu D R,Wei Q L.Policy iteration adaptive dynamic programming algorithm for discrete-time nonlinear systems.IEEE Transactions on Neural Networks and Learning Systems,2014,25(3):621-634
[48]Wang F Y,Zhao J,Lun S X.Arti fi cial power systems for the operation and management of complex power grids.Southern Power System Technology,2008,2(3):1-6(in Chinese)
[49]Wang F Y,Li L F,Huang X,Zou Y M.“An Investigation on Long Term Continuous Safe and Effective Ethylene Production”.Computer and Applied Chemistry,2007,24(12):1171-1713(in Chinese)
[50]Wang F Y.“The framework of PeMS:research and applications”,China Emergency Management,Decembe 2007,22-27(in Chinese)
[51]Zeng D,Wang F Y,Zheng X L,Yuan Y.Intelligent-commerce research in China.IEEE Intelligent Systems,2008,23(6):14-18
[52]Skopik F,Qin L.Trustworthy incident information sharing in social cyber defense alliances.In:Proceedings of the 2013 IEEE Symposium on Computers and Communications(ISCC).Split:IEEE 2013.233-239
[53]Jaehong P,Yuan C,Sandhu R.Towards a framework for cyber social status based trusted open collaboration.In:Proceedings of the 6th International Conference on Collaborative Computing:Networking, Applications and Worksharing(CollaborateCom).Chicago,IL:IEEE, 2010.1-8
[54]Zhu F H,Chen S H,Mao Z H,Miao Q H.Parallel Public Transportation System and Its Application in Evaluating Evacuation Plans for Large-Scale Activities.IEEE Transactions on Intelligent Transportation Systems,2014,15(4):1728-1733
[55]Xiong G,Dong X S,Fan D,Zhu F H,Wang K,Lv Y S.Parallel traf fi c management system and its application to the 2010 Asian games.IEEE Transactions on Intelligent Transportation Systems,2013,14(1):225-235
[56]Sun X B,Dong H R,Ning B,Gao T X,Kong Q J.ACP-based emergency evacuation system.Acta Automatica Sinica,2014,40(1): 16-23(in Chinese)
[57]Ning B,Tang T,Dong H R,Wen D,Liu D R,Gao S G,Wang J.An introduction to parallel control and management for high-speed railway systems.IEEE Transactions on Intelligent Transportation Systems,2011, 12(4):1473-1483
[58]Zhu F H,Wen D,Chen S H.Computational traf fi c experiments based on arti fi cial transportation systems:an application of ACP approach.IEEE Transactions on Intelligent Transportation Systems,2013,14(1):189-198

Fenghua Zhu received his Ph.D.degree from the Institute of Automation,Chinese Academy of Sciences,China in 2008.He is currently an associate professor at the State Key Laboratory of Management and Control for Complex Systems,Institute of Automation,and the Cloud Computing Center, Chinese Academy of Sciences,China.His research interests include arti fi cial transportation systems and parallel transportation management systems.

Xiwei Liu received his Ph.D.degree at Nara Institute of Science and Technology,Japan in 2006.He is currently an associate professor at the State Key Laboratory of Management and Control for Complex Systems,Institute of Automation,Chinese Academy of Sciences,and Qingdao Academy of Intelligent Industries,China.His research interests include human factor engineering,sensor network,modeling and control of complex systems,and management information system.

Xisong Dong received his Ph.D.degree from University of Science and Technology Beijing,China in 2007.He is currently an assistant professor at the State Key Laboratory of Management and Control for Complex Systems,Institute of Automation, Chinese Academy of Sciences,China.His research interests include modeling and analysis of complex systems,and intelligent transportation system.

Wuling Huang received his Ph.D.degree from the Institute of Automation,Chinese Academy of Sciences,China in 2014.He is currently an associate professor at the State Key Laboratory of Management and Control for Complex Systems,Institute of Automation,Chinese Academy of Sciences,and Beijing Engineering Research Center for Intelligent Systems and Technology,China.His research interests include intelligent vehicles in intelligent transportation systems.
Songhang Chen received his Ph.D.degree from the Institute of Automation,Chinese Academy of Sciences,China in 2014.He is currently an assistant professor at the State Key Laboratory of Management and Control for Complex Systems,Institute of Automation,Chinese Academy of Sciences,and Beijing Engineering Research Center for Intelligent Systems and Technology,China.His research interests include social networks,agent-based traf fi c simulation,and intelligent transportation systems.

Kai Zhao received his Ph.D.degree from Shandong University,China in 2013.He is currently a research and design engineer at Qingdao Academy of Intelligent Industries,Chinese Academy of Sciences,China.His research interests include wireless sensor networks,social computing,and intelligent transportation system.
g
his Ph.D.degree from Shanghai Jiao Tong University,China in 1996.He is currently a professor at the State Key Laboratory of Management and Control of Complex Systems, Institute of Automation,Chinese Academy of Sciences,China.His research interests include modeling and optimization of complex system,parallel control and management,cloud computing,big data,intelligent transportation system,and intelligent manufacturing.Corresponding author of this paper.
Manuscript received October 13,2014;accepted April 28,2015.This work was supported by National Natural Science Foundation of China(71232006, 61233001,61174172,61104160,61203166)and Dongguan’s Innovation Talents Project.Recommended by Associate Editor Yilin Mo.
:Gang Xiong,Fenghua Zhu,Xiwei Liu,Xisong Dong,Wuling Huang,Songhang Chen,Kai Zhao.Cyber-physical-social system in intelligent transportation.IEEE/CAA Journal of Automatica Sinica,2015,2(3):320-333
Gang Xiong and Xisong Dong are with the State Key Laboratory of Management and Control for Complex Systems,Institute of Automation,Chinese Academy of Science,Beijing 100190,China(e-mail:gang.xiong@ia.ac.cn; xisong.dong@ia.ac.cn).
Wuling Huang and Songhang Chen are with Beijing Engineering Research Center for Intelligent Systems and Technology,Institute of Automation,Chinese Academy of Science,Beijing 100190,China(e-mail: wuling.huang@ia.ac.cn;songhang.chen@ia.ac.cn).
Fenghua Zhu is with the Cloud Computing Center,Chinese Academy of Sciences,Dongguan 523808,China(e-mail:zhufh@casc.ac.cn).
Xiwei Liu and Kai Zhao are with Qingdao Academy of Intelligent Industries,Qingdao 266109,China(e-mail:xiwei.liu@qaii.ac.cn; kai.zhao@qaii.ac.cn).
 IEEE/CAA Journal of Automatica Sinica2015年3期
IEEE/CAA Journal of Automatica Sinica2015年3期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Dynamic Coverage with Wireless Sensor and Actor Networks in Underwater Environment
- Decentralized Event-Triggered Average Consensus for Multi-Agent Systems in CPSs with Communication Constraints
- Cyber-physical Modeling and Control of Crowd of Pedestrians:A Review and New Framework
- An Approach of Distributed Joint Optimization for Cluster-based Wireless Sensor Networks
- Robust Dataset Classi fi cation Approach Based on Neighbor Searching and Kernel Fuzzy C-Means
- Guest Editorial for Special Issue on Cyber-Physical Systems