
基于飞思卡尔单片机的智能小车设计与制作
2015-07-28 18:39李海波陆善婷
课程教育研究·上 2015年7期
李海波 陆善婷
【摘要】本设计以飞思卡尔单片机MK60DN512VLL10为核心芯片,通过信号收集处理并控制智能车各个硬件,实现对小车的远程遥控控制,避免碰触障碍物,利用超声波传感器检测道路上的障碍物,行驶时间、速度、里程的显示等几大功能,并对其功能进行测试,整个控制系统设计结构简单,电路功耗低,所用元器件低价高性能,可靠性强,测试结果与预期结果一致。
【关键词】飞思卡尔单片机 电机驱动 红外遥控 超声波避障 红外避障
【中图分类号】G64 【文献标识码】A 【文章编号】2095-3089(2015)07-0224-01
引言
近年来汽车工业迅速发展,其中无人驾驶更受汽车工业发面的重视,道路识别、前进、倒车、红绿灯检测、道路行人识别与避障、速度控制等都是汽车工业无人驾驶方面的重要内容,与此同时,关于汽车方面的研究也越来越多。全国电子竞赛、各高校电子竞赛、飞思卡尔杯全国大学生智能车竞赛等都有一智能车设计为题材,参设竞赛,可见智能车方面的研究已越来越受关注。越来越多的高校都开始重视这方面的研究,可见其具有重要的研究和推广意义。
1.系统总体设计概述
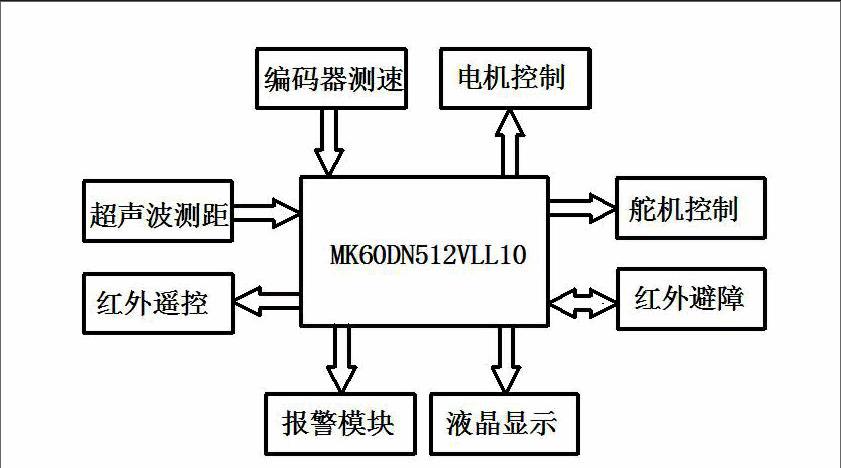
智能小车大体可分为由车体地板、单片机、电机、舵机、超声波传感器、红外对管、红外遥控等模块组成(见图1)。小车以飞思卡尔单片机K60为控制核心,实时监测接收由红外对管传感器、超声波传感器、红外遥控传感器发送出来的信号,并对其信号进行解密处理,提取有效信号,控制舵机的转向、电机速度、液晶显示,和障碍报警。
2.电机驱动电路
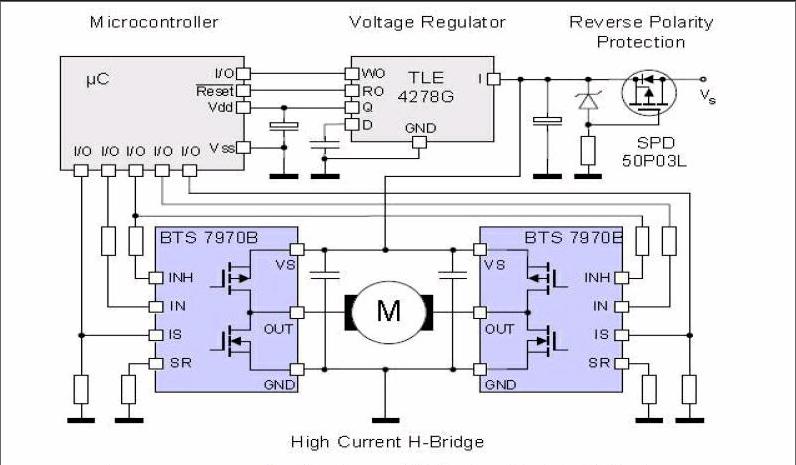
本设计由两个BTS7970构成的H桥驱动电路实现驱动(如图2)。由于采用了高性能的驱动电路,在程序上运用PWM波控制控制电机的转速和启停,加上使用编码器准确的测速,利用PID算法控制PWM波,当编码器将速度信息返回给单片机后,单片机自动进行比较给定的速度和实际测量的速度,然后将差值反馈给PID,通过适当的PID算法控制电机的PWM波,使得电机速度快速达到预定值。
3.避障、循迹模块电路
采用红外避障、循迹传感器,这是一种由红外发射管与红外接收管共同构成的光电传感器。光电开关就是利用这种电信号的变化而设计的。当这种电信号比较强时,说明有障碍物反射了红外发射管发出的红外线,光电开关为关状态,当电信号较弱时,说明没有障碍物反射红外线,观点开关为关状态, 红外避障传感器就是利用光电开关的这一开关特性而设计的。当检测到障碍物时,光电开关为关状态,单片机采集到这个信号后,立即对舵机、电机的状态进行改变,已达到避障的目的。
4.远程遥控
针对远程遥控技术,本设计中使用了目前使用较为广泛的一种通讯和远程遥控技术,由于红外线遥控装置具有体积小、功耗低、功能强、成本低等特点,因而,继彩电、录像机之后,在录音机、音响设备、空凋机以及玩具等其它小型电器装置上也纷纷采用红外线遥控。
本设计使用一体化红外线接收器,是一种集红外线接收和放大于一体,不需要任何外接元件,就能完成从红外线接收到输出与TTL电平信号兼容的所有工作,而体积和普通的塑封三极管大小一样,它适合于各种红外线遥控和红外线数据传输。
5.系统软件设计
本设计采用模块化设计方法,在AIR Systems环境下采用C语言编写程序。相关程序主要包括主程序、无线接收、电机驱动、避障、循迹、舵机控制、速度控制、按键、液晶显示等程序模块。
单片机通过不断的循环检测各个模块发送过来的信号,当检测到有无线遥控信号时,立刻切换到遥控模式,然后进行相应的动作,如果没有检测到无线信号,则继续进行自动行驶模式,根据避障、循迹、超声波等模块采集到的信号,自动进行相应的动作,比如电机的速度控制、舵机的转角控制、液晶显示、障碍报警、脱离赛道报警等动作。
6.总结
本设计使用了在汽车工业领域的芯片行业具有一定主导地位的芯片公司(飞思卡尔)所生产的32位核心控制器——MK60DN512VLL10单片机,其具有多路时钟发生器(MCG),配置有四种时钟:内核时钟(core)、总线时钟(bus)、外部总线时钟(FlexBus)、Flash 时钟(Flash clock),最高时钟的频率高达180MHz,具有高速的运行能力,另外带有看门狗电源模块,通过程序控制可达到待机状态,具有低功耗的优点。利用此款单片机设计一辆可智能避障行驶前进,外加各种数据采集、显示实时行驶情况,故障、危险报警等一系列动作的全自动小车。
参考文献:
[1]雷贞勇,谢光骥.飞思卡尔智能车舵机和测速的控制设计与实现[J].电子设计工程,2010(02)
[2]王晶,翁显耀,梁业宗.自动寻迹小车的传感器模块设计[J].现代电子技术,2008,22(3):192-194
[3]张拓,戴亚文.基于AT89S52单片机的智能循迹机器人设计[J].机电工程基础,2009,1(3):13-15
[4]吕泉.现代传感器原理及应用[M].北京:清华大学出版社,2006.
[5]谭浩强.C语言程序设计(第四版)[M].北京:清华大学出版社,2010