
基于S7-1200 PLC的煤矿架空乘人装置多段调速设计
2015-07-28 08:25大屯煤电公司徐庄煤矿江苏沛县221611
山东工业技术 2015年18期
邵 华(大屯煤电公司徐庄煤矿,江苏 沛县 221611)
基于S7-1200 PLC的煤矿架空乘人装置多段调速设计
邵 华
(大屯煤电公司徐庄煤矿,江苏 沛县 221611)
摘 要:本文首先介绍编码器装置测量实际运行速度的工作原理,并通过S7-1200PLC对实际的速度进行采集和数值处理,同时完成装置高中低三段速度调节。然后把相关控制量分别组态到触摸屏和上位机上。通过变频器的多段调速控制,实现根据实际负载情况进行速度的调节,同时实现了现场监控和远程控制。
关键词:架空乘人装置;S7-1200PLC;变频器;编码器
0 引言
架空乘人装置是煤矿井下人员运输的主要工具之一,其主要功能是实现人员的输送,从而缩短上班路上时间的拖延,以及减少人员行进中的体力消耗。经过实际的调研,根据架空乘人装置负载情况可分为三种运行状态。满载:当上下班高峰时,人员基本达到上线人数或者接近额定个数,此时运行速度很慢。正常情况:一般情况下,人员不是很多,及正常情况下的运行。空载:一般为了试运行或者维修吊椅,或者用于偶尔有个别人员的乘车情况。根据以上情况本文设计,根据电机基本原理,满载时通过变频器给出高频率输出,空载时采用低频率接入运行,正常时则用中间规定频率接入运行。同时在上位机和就地设置三个频率的转换开关以及显示功能。通过本设计不仅提高满载运行时的人员输送效率和节约空载时电能消耗,并且通过上位机和触摸屏实现实时运行状态监控功能。
1 编码器测速方法及工作原理
本装置采用的BQH24矿用本安型编码器是一种旋转增量式编码器,其原理是通过旋转得到测量的脉冲个数来转化出速度,所以编码器测速装置通过机械设计与转动轮组成同轴转动装置,这样测量到的速度就是钢丝绳的实际运行速度。
该编码器是多通道编码器,在此用其中A相通道,其输出脉冲是2000个,即每转一圈产生2000个脉冲。已知在系统运行时编码器与托绳轮同步转动,因此有相同的角速度,进而得出脉冲与速度的对应转化公式如下[1]。

N:t时间内采集的脉冲个数
t:采集N个脉冲的时间
D:托绳轮的直径
v:系统运行的实际速度
其中轮子直径单位为米,采集脉冲时间为秒,得到的速度单位则为米/秒。由上面公式可知:一般先设定采集脉冲的时间,不宜过长或过短。过长时,当出现速度故障时,在一个采样周期才能报警,这样潜在的危险很大;过短时,测量速度不够精确,且测量值变化太快。经过调试在PLC程序内设置采集脉冲时间t=1s。
2 PLC设计
2.1 高速脉冲端口设置
本装置采用西门子S7-1214DC/DC/DC型号CPU作为核心控制器,其自带14点输入/10点输出,在此分配的物理地址为IB0、IB1/ QB0、QB1。经过验证该CPU集成的输入点读取频率已经不能满足此编码器的脉冲频率,因此开启了集成I/O高数脉冲端口属性[2],在此选用输入点I0.2,其软件设置分为三个步骤如下。
(1)打开项目软件,在设备组态上选中CPU,并选择 “属性”选项夹,选择高速计数器HSC2。
(2)功能设置,为了完成本系统需要,设置选取的计数类型、工作模式、频率测量周期等具体如图1所示。
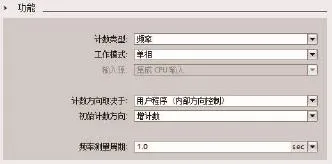
图1 启用高速脉冲的软件功能设置
(3)设置输入起始地址,默认寻址地址是1004,在此为了与已用地址不冲突改为996。
2.2 变频器与PLC的连接和设置
本系统采用西门子MM440变频器进行电机的多段调速,PLC与变频器的简要电气接线示意图如图2所示。
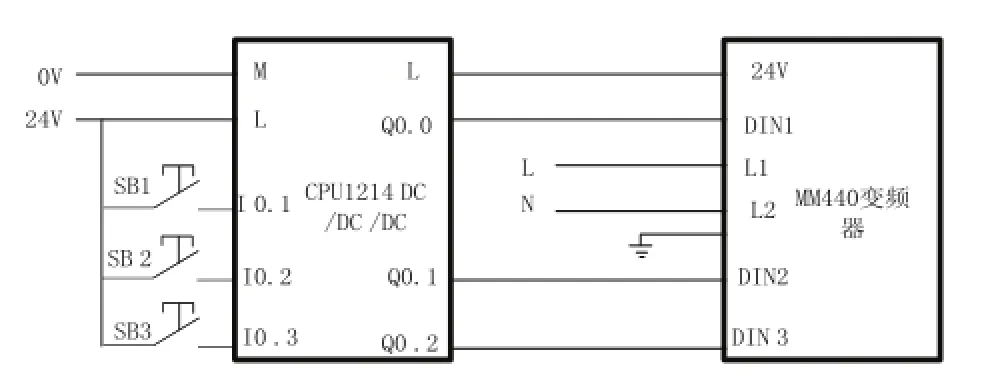
图2 电气接线示意图
为了增加可靠性[3],PLC的输出与变频器连接时可以增加三个中间继电器。当DIN1端子与变频器的24V(端子9)连接时对应频率35Hz,当DIN1端子和DIN2端子同时与变频器的24V(端子9)接通时对应频率是40Hz,当三个都连接时,对应45Hz,也就是对应的高中低档,满足满载、正常、空载需要。
根据电机参数以及多段调速等要求变频器主要参数设置如表1所示。
2.3 程序设置
本系统PLC硬件组态和软件编程在TIA Portal V13设计实现。在硬件组态时,设置启动CPU高速脉冲计数点I0.2属性,软件平台编程一般采用模块的方式,在编码器测速的这个模块中,公式一对应程序如图3所示。
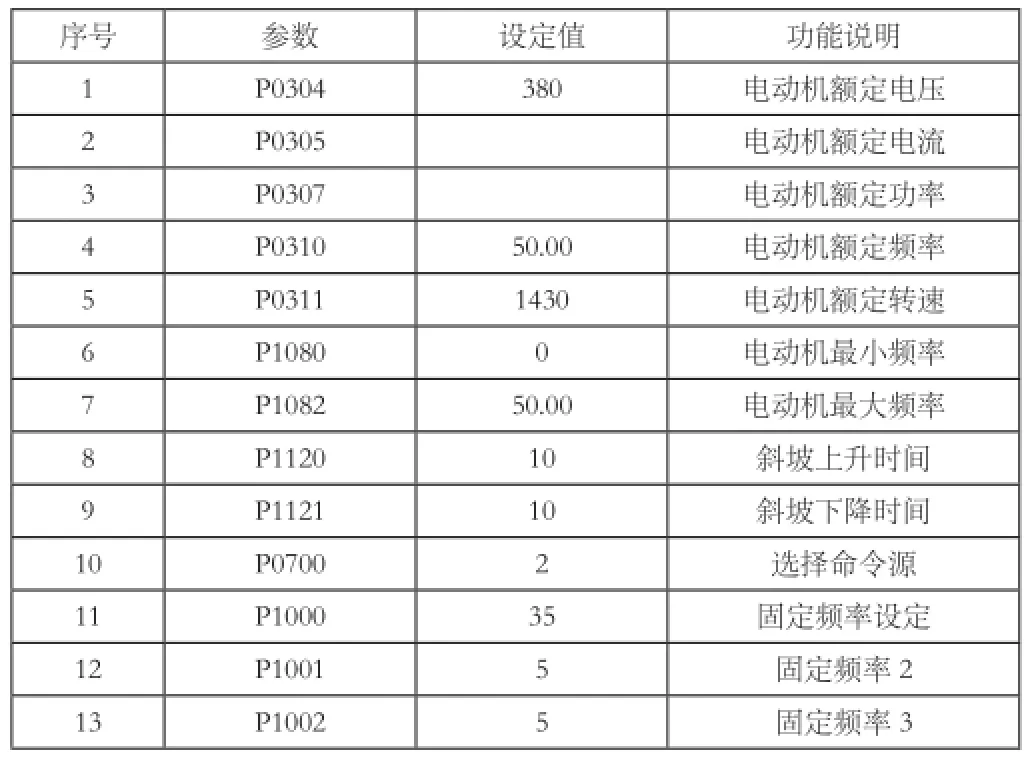
表1
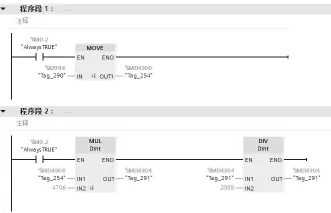
图3 PLC数据运算程序段
对应上述公式可知,程序段2中MUL功能块中的IN2是根据现场轮子直径以及单位换算得出的数据,DIV功能块中的IN2是编码器的额定输出脉冲值2000。显然最终MD4304得出的值即是以m/s为单位的测量速度大小。
另外,程序内还要设置高于或低于MD4300值的20%作为报警的最大上下界限,显然不是参考MD4304的20%,并在此范围内进行高中低档的调速控制,即在整个过程中,速度保护是投入的,彼此之间的数值关系需要现场进行精确调试,把上下线的设置和高中低档频率的设定进行综合考虑。
3 触摸屏显示
触摸屏选用型号为PT070-4BF-T1S,其主要实现运行信号以及参数的现场监视和设置。PLC与触摸屏的以太网通信连接,在PM Designer软件上设置通信途径,并组态相关功能静态主画面如图4所示。
静态画面主要的组态的对象有,装置的操作方式,工作方式油压站相关参数,以及五大基本保护[4],以及报警表格,把每次的报警以表格形式显示出来,同时记录每次的启动和停车原因,并显示当前运行和剩余运行时间等。有分别组态速度上下线,保护屏蔽等画面。是的调试更加灵活。
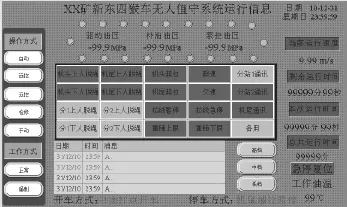
图4 触摸屏组态静态画面
4 上位机显示
上位机显示主要是为了实现远程监控功能。使得调度室能够时刻准确掌握装置运行状况。本设计上位机开发是在WINCC7.2版本的基础上实现的,可以直接与S7-1200PLC进行数据交换,避免了通过OPC的繁琐过程。本部分不仅组态系统具体的功能,还通过数据库,实现对故障的记录和查询等功能。同时集合程序实现高中低档调节的优先级控制。
5 结语
本文详细阐述了利用编码器测速的工作原理和在程序中的数据处理,同时介绍与变频器的连接,实现三级调速,主要解决在上下班高峰时人员运输效率降低的情况。最后在触摸屏和上位机上显示,实现就地和远程监控功能。目前随着运输人员个数的不确定性,要求更高精确和经济的控制。如果在PLC中调用PID功能模块[5][6],这样既搭建系统简单又能实现装置优化控制,从而实现节能调速控制,因此在架空乘人装置自动控制系统利用PID电机调速原理具有一定的现实意义和可操作性。
参考文献:
[1]高俊峰.基于PLC的矿井架空乘人装置自动控制系统设计[J].煤炭技术,2014(09):226-228.
[2]西门子(中国)有限公司.深入浅出西门子S7-1200PLC[M].北京:北京航空航天大学出版社,2009.
[3]向晓汉.PLC西门子PLC高级应用实例精解[M].北京:机械工业出版社,2010.
[4]高俊峰,雷天华,金敏.S7-1200 PLC的煤矿架空乘人装置自动控制系统 [J].煤矿机械,2014(11):224-226.
[5]王仁祥,王小曼.西门子S7-1200 PLC编程方法与工程应用[M].北京:中国电力出版社,2011.
[6]廖常初.S7-1200 PLC编程及应用[M].北京:机械工业出版社,2010.
作者简介:邵华(1976-),男,江苏沛县人,本科,工程师,主要从事:煤矿自动化技术应用工作。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
科学与财富(2022年6期)2022-07-04
齐齐哈尔大学学报(自然科学版)(2022年4期)2022-06-15
建材发展导向(2022年1期)2022-03-08
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
——编码器
演艺科技(2020年7期)2020-08-13
知识就是力量(2018年7期)2018-07-11
电脑知识与技术(2018年8期)2018-05-07
青年时代(2017年7期)2017-03-28
