数字式主令控制器的替代实现方法
2015-07-27 08:27刘吉强岳利维黑龙江电力有限公司牡丹江水力发电总厂黑龙江牡丹江57000长春冰上训练基地长春30000
山东工业技术 2015年15期
刘吉强,岳利维(.黑龙江电力有限公司牡丹江水力发电总厂,黑龙江 牡丹江 57000; .长春冰上训练基地,长春 30000)
数字式主令控制器的替代实现方法
刘吉强1,岳利维2
(1.黑龙江电力有限公司牡丹江水力发电总厂,黑龙江牡丹江157000;2.长春冰上训练基地,长春130000)
摘要:数字式主令控制器是现在水电厂自动控制中提供接力器位置服务的主要设备。但该种设备已跟不上科技发展,技术及数据精度都不能满足精确调控的要求。本文就此问题探讨了一下 以昆腾PLC进行实时采样计算替代该种设备的可行性与实现方法,抛砖引玉,以利后人。
关键词:主令控制器;昆腾PLC;实时采样计算
1 课题背景及研究的意义
进入21世纪以来,伴随着我国经济和科学技术的迅速发展,人们生活水平不断提高,电力工业也得到了迅猛的发展。电力工业是我国的基础产业,它的安全关系到国民的各个行业和部门,确保电力系统安全生产和稳定运行,是电力行业的首要任务。电力生产的目的,就是保证向国民经济各行业和人民生活可靠、安全的提供电能[1]。由此提高设备运行稳定性成为电力工作者的首要任务。为此对数字式主令控制器的替代实现方法进行研究,以期减少中间环节以减少故障率,提高运行可靠性,提高运行效率.减少维护量及维护成本。
2 旧系统的实现原理与弊端
2.1旧系统的实现原理
莲花厂现运行的主令控制系统的实现方法为:通过将安装在水车室接力器推拉杆上的拉线式位移传感器获取的4-20MA电流值上送至北疆的数字式主令控制器,比较预设的动作值,开出继电器节点来向需求设备提供位置控制变量。
2.2旧有系统弊端
(1)北疆的数字式主令控制器系21世纪初的产品,其功能及精细度已经跟不上时代技术日新月业的发展,且连续使用年代已近10年,老化程度严重,并因厂家已不再生产而处于无备件更换的尴尬境地,是为极大的安全隐患,并且该类设备的购置款项较为庞大;
(2)该设备与监控系统的接力器位移行程采集系统共用拉线式位移传感器,由于其原件品质次于施奈德系列产品,在共用的电流环路中造成不可预期的扰流,影响了监控系统的接力器位移行程采集的精确度,并多次烧毁采集设备,造成较大的经济损失;
(3)该设备提供的采样精度较低且为点式判断,极易造成输出点环绕基值震荡,影响调控精度,降低机组运行效率;
(4)该设备的终端用户设备稀少,其主要用户仅为监控系统.且监控系统有更为优良的采集设备,却仅被用于显示;
(5)原系统由继电器组实现信号对接,翻印速度较慢。
3 新系统的实现原理与方法
3.1新系统实现原理
由监控系统的现地控制单元对其采取的接力器位移行程变量进行运算,采运区域比较的方法规避点式判断带来的扰流.为终端用户设备提供可靠的主令位置服务.
3.2新系统实现方法
3.2.1创建必要的变量(见表1)
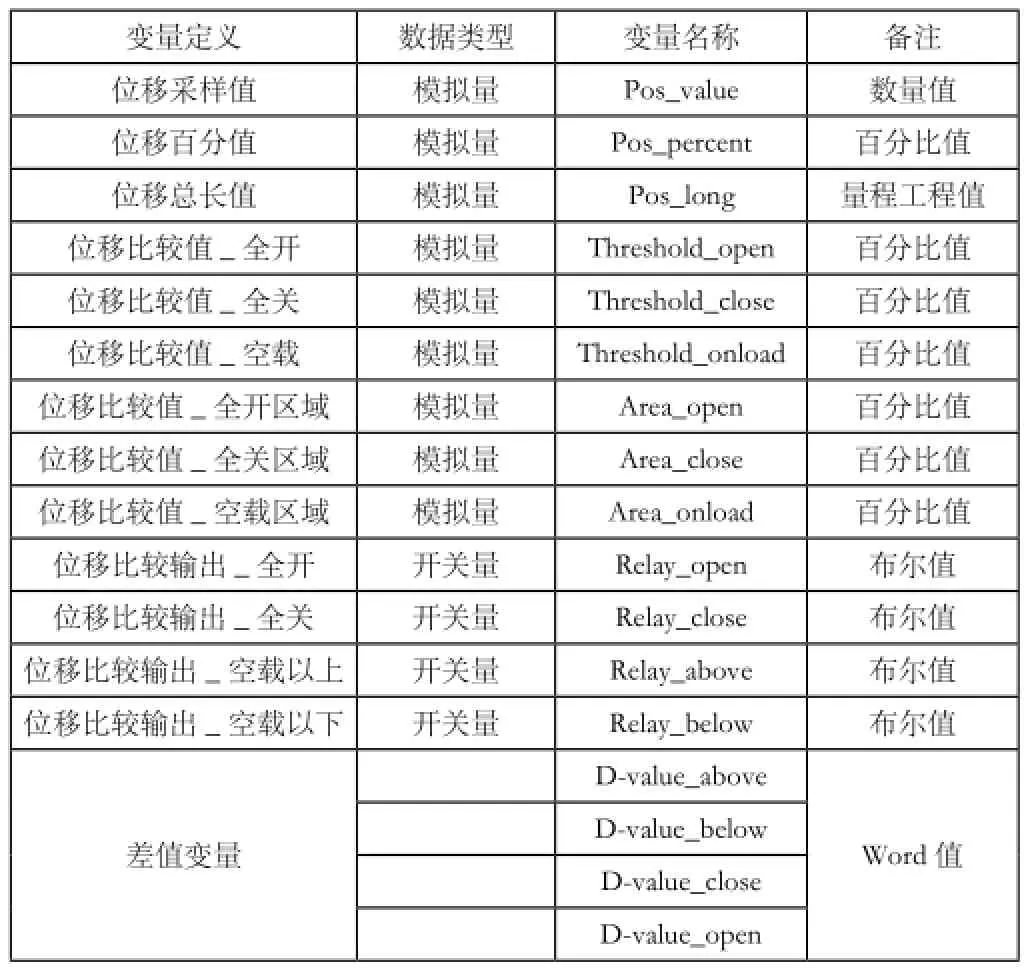
表1
3.2.2获取监控系统采集的变量
监控系统已将安装在水车室接力器推拉杆上的拉线式位移传感器获取的4-20MA电流值通过模拟量输入模块转换为0-4095 [2] 之间的数字量 存放在地址 %MW3554 中。现将其赋予变量Pos_value.
3.2.3转换为百分值
获取位移总长值Pos_long,位移采样值Pos_value,计算百分比值并放入变量Pos_percent中。
3.2.4阈值计算原理
(1)首先比较 Pos_percent(位移百分比) 与 Threshold_ onload(位移比较值_空载)比较 ,结果放入 D-value_above中。如果该变量大于零 且大于 1/2Area_onload(位移比较值_空载区域) ,则将变量 Relay_above(位移比较输出_空载以上)置位。
(2)并进而比较Pos_percent(位移百分比) 与 Threshold_ open(位移比较值_全开)减去Area_open(位移比较值_全开区域)的差值,结果放入D-value_open中。如果该值大于或等于零。则将变量Relay_open(位移比较输出_全开)置位。否则回复执行3.2.4.1步骤。
(3)同上所诉当比较并置位Relay_below(位移比较输出_空载以下)以及Threshold_close(位移比较值_全关)。
3.2.5程序列表(由施耐德-UN ITY3.1)编制
Pos_value:= %MW3554 ;
Pos_percent= Pos_value / Pos_long * 100%;
D-value_above = Pos_percent - (Threshold_onload+1/2Area_onload);
D-value_below = Pos_percent - (Threshold_onload-1/2Area_onload);
D-value_close = Pos_percent - (Threshold_close + Area_close );
D-value_open = Pos_percent - (Threshold_open - Area_open );
If D-value_above >0 then Relay_above:=1 else Relay_above :=0 ;
If D-value_open >0 then Relay_open :=1 else Relay_above:=0 ;
If D-value_below >0 then Relay_above :=0 else Relay_above :=1;
If D-value_close >0 then Relay_above :=0 else Relay_above :=1 ;
4 结论
上诉方法已在我厂机组试验。实验证明该方法可以减少大笔设备开支,减少中间环节以减少故障率,提高运行可靠性,提高运行效率.减少维护量及维护成本。
参考文献:
[1]杨文学,任红.电力安全技术[M].北京:中国电力出版社,2010:3-5.
[2]施耐德自动化公司.Modicon TSX Quantum硬件手册[S].北京:施耐德电气,1998:145.