关于独立驱动电动汽车机电耦合系统的研究
2015-07-27 08:27:24卢从娟重庆交通大学机电与汽车工程学院重庆400074
山东工业技术 2015年15期
卢从娟(重庆交通大学机电与汽车工程学院,重庆 400074)
关于独立驱动电动汽车机电耦合系统的研究
卢从娟
(重庆交通大学机电与汽车工程学院,重庆400074)
摘要:电动汽车是现代汽车行业刚刚出现不久的新产品,也是未来汽车行业发展的新趋势。因为电动汽车动力来源于车载电池,污染小,绿色环保。但是独立驱动电动汽车中经常会因为机电耦合系统中防滑控制造成动力下降的问题。本文正是对独立驱动电动汽车机电耦合系统中黏性联轴器进行实验研究和对比,希望可以提高电动汽车的安全和性能。
关键词:独立驱动;电动汽车;机电耦合系统;研究
相比于集中驱动来说,独立驱动电动汽车优点是可以利用单独控制每个驱动轮的驱动转矩来优化汽车在行驶时的性能,这是独立驱动汽车比集中驱动汽车优秀的地方。但是独立驱动汽车在某些方面还没有集中驱动汽车优秀,例如当车辆在行驶中低附路面的车轮打滑,必须要通过减少或者停止打滑车轮侧驱动电极的输出转矩来使得车轮恢复工作,这样虽然确保了行驶安全但是导致打滑车轮一侧的驱动闲置,因此本文选择了黏性联轴器作为机电耦合系统,研究汽车的动力性和稳定性。
1 黏性联轴器的选择和设计
1.1黏性联轴器的选择
以最近发明的具有防滑差速的双电机独立驱动车辆作为实验研究对象。黏性联轴器主要组成部分是输入轴、输出轴、外壳、内外摩擦片、硅油和油封。其中外壳是与输出轴相连的部分,而硅油则是为联轴器黏性工作的材料。黏性联轴器有两种工作状态,分别是驼峰和剪切。当车辆静止时处于驼峰状态,当车辆行驶时是剪切状态,也就是说当黏性联轴器想要让驱动转矩转速减缓时是利用对硅油的剪切。
1.2黏性联轴器的参数设置
由于选择的目标车型性能参数如表1所示,然后对目标车辆进行实验得到:目标汽车正常转向时,两边车轮转速差最高为80r/min,这就意味着将要设计的黏性联轴器在不工作状态时两边转速差必须大于80,通过设计,黏性联轴器的性能数据参考表2。
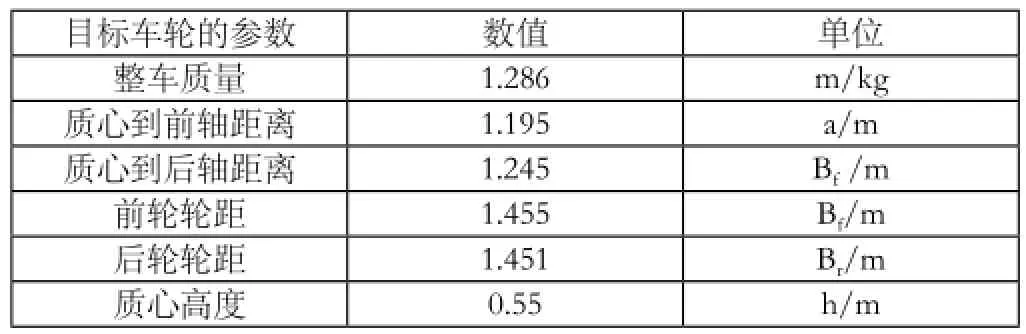
表1 目标车型的性能参数

表2 设计后的黏性联轴器参数
2 安装黏性联轴器的车辆动力研究
对安装黏性联轴器和未安装车辆进行仿真分析:
2.1电动汽车的动力性仿真
将电动汽车车轮左侧路面附着系数设为0.8,车轮右侧路面附着系数设为0.2,车辆在此路面上行驶,左前轮划转情况和右前轮滑转情况以及对两辆车进行加速时的速度变化。
2.2电动汽车的动力性仿真分析
安装黏性联轴器的电动汽车,在附着系数高路面上的左车轮滑转率要比没有安装黏性联轴器的电动汽车左车轮滑转率要高一些,但左车轮仍然处于正常工作状态。因为黏性联轴器将右侧机电的一部分转矩传到左侧车轮,从而导致左车轮滑转率的提高。其次,中安装黏性联轴器的电动汽车右前轮滑转率随着时间在不断降低,而没安装黏性联轴器的汽车右前轮产生滑转状况。当没有安装黏性联轴器的电动汽车右前轮发生滑转现象时,为了保证电动汽车的安全性,必须要减少右侧电机的输出转矩来降低右侧的驱动转矩,进而减少右前轮的滑转。而安装有黏性联轴器的电动汽车能够无需降低右侧的驱动转矩。最后,安装黏性联轴器的电动汽车在对汽车进行加速时,每秒的加速度要高于没有安装黏性联轴器的电动汽车。这是因为安装有黏性联轴器的电动汽车在附着系统不高的路面上不需要通过降低电机的输出转矩来避免车轮滑转现象的发生,综合三张图可知,安装黏性联轴器的电动汽车在动力方面都有显著的提高。
3 安装黏性联轴器车辆稳定性研究
假设汽车在行驶过程中转向角度一直是9°,汽车启动后加速到40km/h后保持匀速,无论在附着系数高还是低的路面,安装黏性联轴器的电动汽车在稳定状态下转向时,横摆角速度和侧向加速度都比没安装黏性联轴器的电动汽车低,不但不影响电动汽车正常转向的功能,还能对电动汽车的转向趋势进行了轻微的控制和调整。所以安装黏性联轴器有利于电动汽车的稳定性。
4 结束语
综上所述,通过对独立驱动电动汽车中机电耦合系统安装黏性联轴器后,进行仿真实验,对安装黏性联轴器的电动汽车的动力性和稳定性进行研究,实验结果表明,在独立驱动电动汽车中机电耦合系统中加入黏性联轴器,车轮滑转和转向都有一定程度的降低,汽车的动力性和稳定性明显有所提升,不仅仅简化了驱动防滑控制系统,还对当今的独立驱动系统中左右电机动力无法耦合的问题,提出了一个研究目标。
参考文献:
[1]赵明慧.基于复合滑动率控制的4WID-EV驱动力分配研究[D].燕山大学,2014.
[2]李刚.线控四轮独立驱动轮毂电机电动汽车稳定性与节能控制研究[D].吉林大学,2013.
[3]郭洪强.前后轴独立驱动电动汽车复合制动策略优化研究[D].北京理工大学,2014.
[4]周逢军.基于双层架构的分布式驱动电动汽车综合控制策略研究[D].北京理工大学,2014.
[5]张缓缓.采用电动轮驱动的电动汽车转矩协调控制研究[D].吉林大学,2009.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23 13:46:54
天津外国语大学学报(2021年3期)2021-08-13 08:32:18
辽金历史与考古(2021年0期)2021-07-29 01:06:54
汽车维修与保养(2021年8期)2021-02-16 00:28:32
科技传播(2019年22期)2020-01-14 03:06:54
民用飞机设计与研究(2019年4期)2019-05-21 07:21:24
动漫星空(兴趣百科)(2019年3期)2019-03-07 07:47:46
汽车工程学报(2017年2期)2017-07-05 08:13:02
电子制作(2017年20期)2017-04-26 06:57:35
海外星云(2016年17期)2016-12-01 04:18:42