
二级倒立摆的多模型自适应控制
2015-07-27 07:29齐宏宇张立舒赵中侠乔光波燕京理工学院河北三河0650河北省秦皇岛市卢龙县第四小学河北秦皇岛066000
山东工业技术 2015年14期
齐宏宇,张立舒,赵中侠,乔光波(.燕京理工学院,河北 三河 0650; .河北省秦皇岛市卢龙县第四小学,河北 秦皇岛 066000)
二级倒立摆的多模型自适应控制
齐宏宇1,张立舒1,赵中侠2,乔光波1
(1.燕京理工学院,河北三河065201;2.河北省秦皇岛市卢龙县第四小学,河北秦皇岛066000)
摘要:倒立摆是机器人控制、航空技术研究的典型对象,为教学和科研提供主要平台。通常二级倒立摆建模是将系统进行线性化处理,忽略了两个摆角的角度对系统的影响。但实际上,二级倒立摆是一个非线性系统,角度会对整个系统的稳定性产生直接的影响。当两摆角的角度发生变化时,多模自适应控制器会根据二级倒立摆的运动状态自动切换,使得二级倒立摆的实际运动状态与此时的反馈增益矩阵K相对应。从二级倒立摆的实际运动状态出发,将二级倒立摆系统的输入空间划分成9个局部子空间,通过模糊T-S来选取与子空间相对应的状态方程,使系统的运动状态更加逼近于它的动态性能。使用多模型自适应控制器实现二级倒立摆系统的仿真和实时控制比LQR控制更加精准。采用较少的规则就能成功解决Mamdani型模糊因变量过多而产生的“规则爆炸问题”。
关键词:二级倒立摆;多模型控制;自适应控制;模糊T-S
1 引言
现阶段一级倒立摆的控制算法已基本成熟,而二级倒立摆的控制算法较复杂,通常学校实验平台中只有线性控制算法,为了丰富实验平台对二级倒立摆进行了二次开发,也为学生们提供一个更加广阔的学习平台和更加丰富的实验素材。
本文将非线性系统划分成9个局部线性模型来逼近二级倒立摆实际运动状态,采用多模自适应控制器与模糊T-S相结合的方法成功解决了二级倒立摆系统因多变量的存在而产生的“规则爆炸”问题,并实现了二级倒立摆系统的仿真和实时控制。
2 二级倒立摆的数学模型
采用深圳市元创兴科技有限公司生产的直线二级倒立摆作为研究对象,二级倒立摆的工作原理图如图1所示:
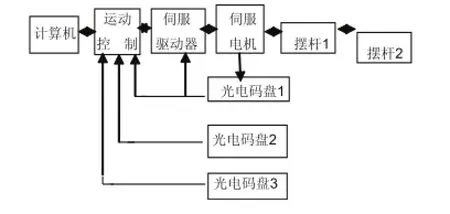
图1 二级倒立摆的工作原理图
伺服电机自带光电码盘,用来检测小车的位移信号和速度信号,并反馈给伺服驱动器和运动控制卡;光电码盘2和光电码盘3分别检测摆杆1和摆杆2的角度和角速度信号,并反馈给运动控制卡;脉冲信号通过伺服驱动器将弱电信号转化成强电信号并传送给伺服电机,同时运动控制卡将读取的实时数据并转化成相应的控制量,驱动电机带动小车运动。使系统达到小车在导轨上平稳运动且直立不倒。
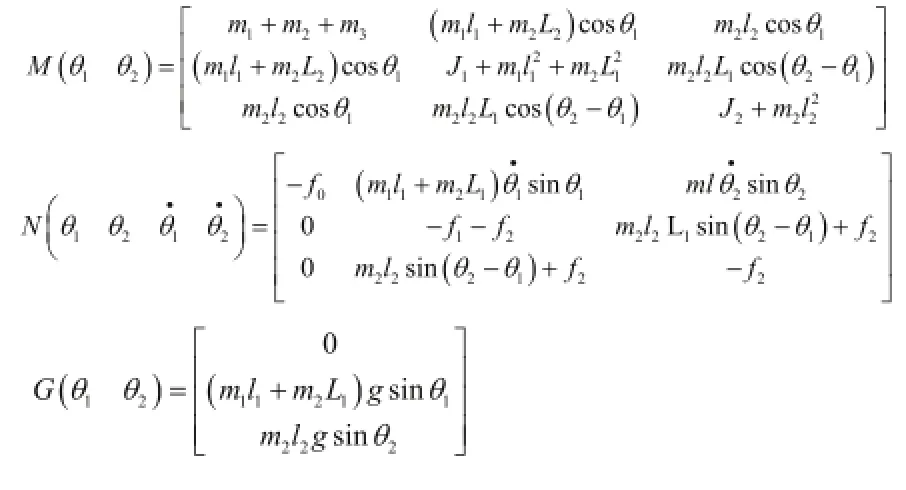
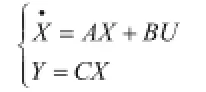
二级倒立摆本身是一个不稳定系统,根据运动学和力学的原理,可得到二级倒立摆系统的数学模型[1]
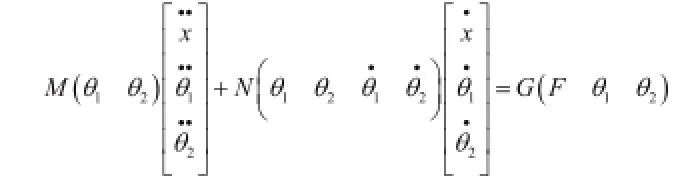
其中:
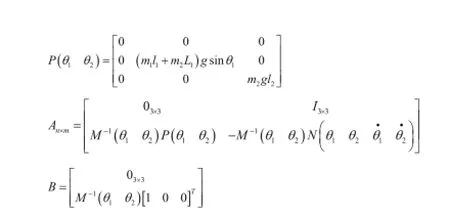
二级倒立摆系统的状态方程:
式中,二级倒立摆的各物理参数见表1所示:
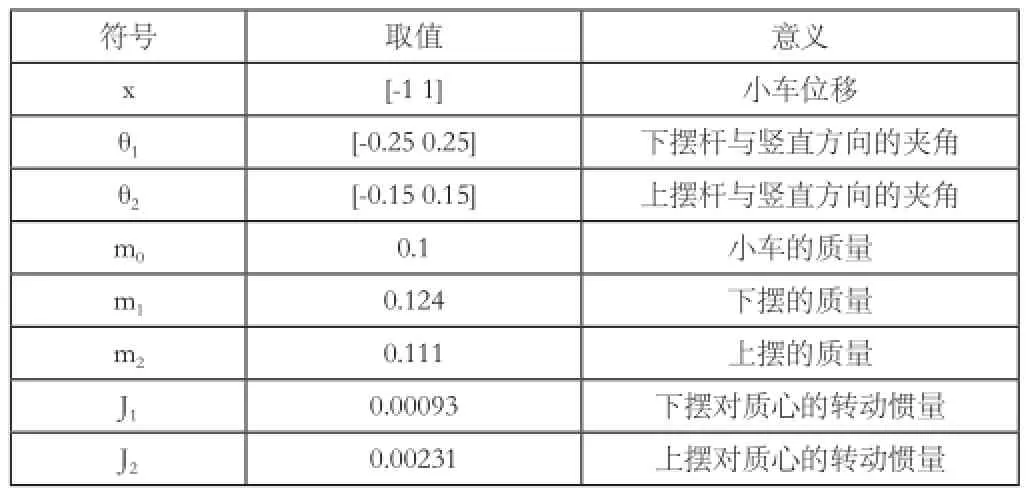
表1 二级倒立摆的物理参数
3 控制器的设计
二级倒立摆系统本身具有6个状态变量,若直接设计模糊控制器,模糊推理规则将达到76=117649条,导致“规则爆炸问题”的出现。本文采用模糊T-S仅需要9条模糊规则,成功地避免了此类问题的发生。
3.1多模自适应控制
在本设计中,将二级倒立摆系统的输入空间划分成9个子空间,每个子空间采用LQR的方法实现系统的反馈控制。每个系统的局部反馈增益矩阵为:
(1)R1:当θ1在零附近,θ2在零附近,则
K1=[3.1561-0.5602-1.1221593.2462219.4674170.3821];
(2)R2:当θ1在零附近,θ2在π/4附近,则
K2=[3.1617-0.3906274.5749147.976749.825169.6581];
(3)R3:当θ1在π/4附近,θ2在零附近,则
K3=[3.1613-156.3033-0.4946236.736134.070988.4124];
(4)R4:当θ1在π/4附近,θ2在π/2附近,则
K4=[3.1623104.4384249.514327.559140.347649.2375];
(5)R5:当θ1在π/2附近,θ2在π/4附近,则
K5=[3.1623562.1212105.152827.5838114.310839.9054];
(6)R6:当θ1在π/2附近,θ2在3π/4附近,则
K6=[3.1623-562.1212-105.152827.5838-114.3108-39.9054];
(7)R7:当θ1在3π/4附近,θ2在π/2附近,则
K7=[3.1623-104.4384-249.514327.5591-40.3476-49.2375];
(8)R8:当θ1在3π/4附近,θ2在π附近,则
K8=[3.1613156.30330.4946236.7361-34.0709-88.4124];
(9)R9:当θ1在π附近,θ2在3π/4附近,则
K9=[3.16160.4088-274.5797148.0895-49.8635-69.6721];
3.2模糊T-S
在本设计中,输入变量采用三角形的隶属函数,输入变量采用3个模糊子集[N,Z,Ρ]来描述。
θ1,θ2的输入隶属函数如图2所示
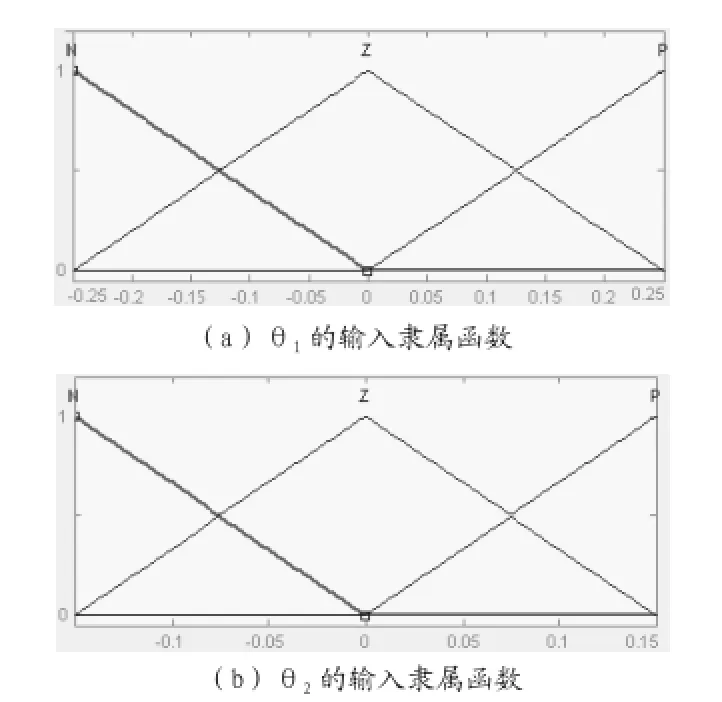
图2 θ1,θ2的输入隶属函数
对应的模糊规则见表2所示:

表2 模糊规则表
当θ1,θ2在零点附近摆动时,状态方程选择第一组数据,模糊T-S[2]选择u=m1时,反馈增益矩阵同时也选择第一组数据。当θ1,θ2改变时,多模控制器进行自动调节使反馈增益矩阵与二级倒立摆的实时运动相对应,保证二级倒立摆的稳定控制。
4 系统仿真
4.1二级倒立摆的仿真图
在Mаtlаb/Simlink/Fuzzy Logic Toolbox中选择Sugeno推理和三角形隶属函数来构造系统的模糊控制器,搭建二级倒立摆系统的仿真结构图,用S函数来编写二级倒立摆系统反馈增益矩阵。二级倒立摆系统仿真结构图如图3所示:

图3 二级倒立摆系统仿真结构图
通过观察示波器可以得到系统的仿真图,二级倒立摆系统仿真图如图4所示:
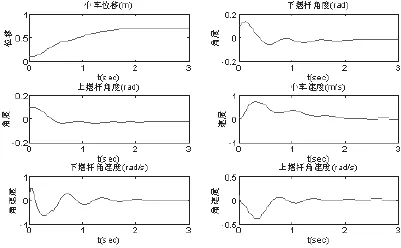
图4 二级倒立摆系统仿真图
仿真曲线表明:将多模型控制器与模糊T-S相结合的方法应用于二级倒立摆中,多模型自适应控制的仿真曲线在3s以后小车位移和速度、两摆杆角度和角速度都趋于稳定,其仿真曲线波动较小,并且能在很短的时间内达到稳定。
多模自适应控制与模糊T-S相结合的方式,减少了模糊控制器输入变量的维数,进而成功解决了因多变量的存在而造成的“规则爆炸”问题。同时也确保了整个系统在较大控制范围内的稳定。
4.2VC环境下二级倒立摆的实验结果
在VC语言环境下进行系统的编程,通过搭建多模型控制和模糊T-S相结合的控制系统模块,得到实时控制曲线。二级倒立摆系统的实时控制曲线如图5所示:
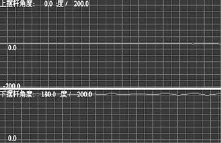
图5 二级倒立摆系统的实时控制曲线
实时控制曲线表明:当系统稳定时,小车带动两摆杆在导轨上做往返运动,多模型控制与模糊T-S相结合的控制方法使二级倒立摆仿真控制曲线与实时控制曲线几乎处于同一条直线。
5 结论
二级倒立摆是一个六入一出的系统,具有多变量、非线性、强耦合、绝对不稳定的特性。本文把多模型自适应控制与模糊T-S相结合的方法应用于倒立摆中,成功实现了系统的仿真和实时控制,减少了输入变量的维数,成功解决了“规则爆炸”问题。降低了模糊控制规则的制定难度,提高系统的稳定性,使二级倒立摆系统更容易控制。
参考文献:
[1]李晓理,王伟,孙维.多模型自适应控制[M].控制与决策2000:390-393.
[2]秦毅,王生铁,张计科.基于T-S模型二级倒立摆的逐级模糊控制[M].工业控制计算机2008:60-62.
作者简介:齐宏宇(1988-),女,北京人,研究方向:系统仿真,数控机床。
