互相关干扰下微弱GPS信号检测方法*
2015-07-25 09:22:44段华华巴晓辉
数据采集与处理 2015年3期
段华华 巴晓辉 陈 杰
(中国科学院微电子研究所,北京,100029)
引 言
全球定位系统(Global position system,GPS)从根本上讲是一个基于码分多址(Code division multiple access,CDMA)的扩频(Spread spectrum,SS)通信系统[1],即不同卫星有不同的伪随机噪声(Pseudo random noise,PRN)码,有相同的码速率,调制在相同的载波频率上。互相关干扰由C/A码相关特性[2]造成,是GPS系统不可避免的问题。对GPS弱信号,要通过较长时间的积分处理来获得信噪比增益[3],同时探寻合适的方法,解决弱信号捕获的互相关干扰问题。
对于GPS弱信号处理中存在的互相关干扰问题,常用的处理方法有干扰消除法、子空间投影法以及利用互相关特性的一系列检测法。干扰消除法[4-7]主要思路是先捕获跟踪强信号,获得强信号信息如码相位、多普勒频移,幅度值等,重构强信号,并从接收信号中除去,再进行弱信号的捕获跟踪处理。干扰消除法优点是能够彻底消除互相关干扰;缺点是强信号信息特别是幅度值难以严格准确获得,重构过程存在比特精度问题和时间延迟,实现较困难。子空间投影法[4,8]利用干扰强信号的载波频率、载波相位和码相位来构建干扰强信号的子空间,并将待检测弱信号分解为其在强信号空间的正交投影V1和垂直于强信号空间投影V2两部分,然后在V2空间中进行弱信号检测,从而达到消除强信号干扰的目的,其优点是不需要重构强信号,在捕获过程中可以实时完成;缺点是对码相位和多普勒频率误差敏感,运算量巨大,需要消耗大量时间和硬件资源。检测法主要是利用接收机只要正确接收到4个以上卫星信号就可定位的特点,接收强信号,检测出互相关干扰,抛弃受互相关干扰的弱信号。文献[9,10]中峰值相差法以最大峰值减次峰值为检测统计量,文献[11]基于均方比方法以最大峰值与前K个峰值平均值的比值为检测统计量,两种方法均有良好的互相关检测性能,可以有效降低弱信号的捕获错误概率,缺点是只能检测出互相关干扰信号,必须后续进行互相关消除才能进行弱信号处理。文献[12]中提出了构造新伪随机码的方法,通过改变本地C/A码中1和-1个数,增强其与强信号的正交性,使互相关影响减弱,其缺点是算法复杂,不具有通用性。
1 信号模型
捕获第i颗卫星,r(t)与本地复制载波混频,再与本地复制C/A码相关,相干积分后得到的信号为
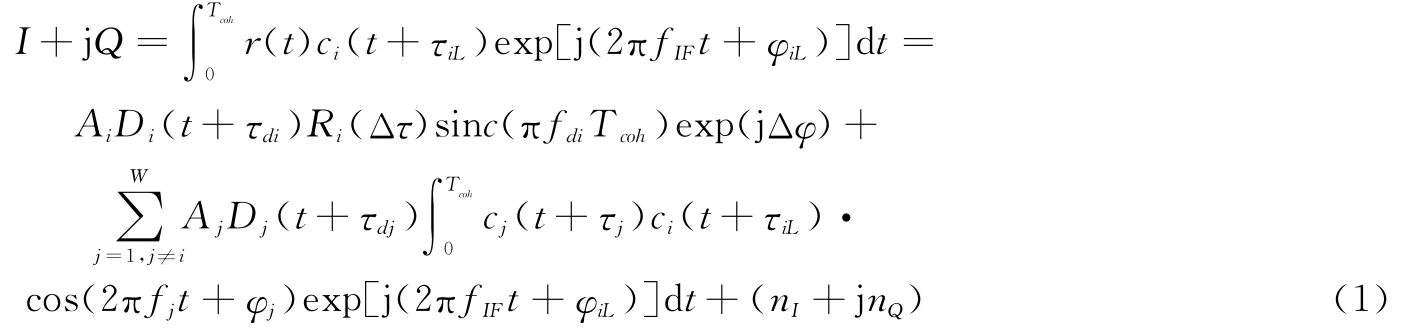
式中:φiL为本地复制载波频率与相位,Δφ为本地复现信号与接收信号载波相位差,Δτ为本地复现码与接收码之间的相位延时,Δτ=τi-τiL。第1项为自相关结果,第2项为互相关结果,第3项为零均值高斯白噪声。卫星i与最强卫星信号强度差值越大,互相关影响越大,会造成假捕获,捕获到的结果可能是互相关峰。
忽略下标i,非相干累加后捕获结果可表示为

式中:L为非相干累加次数;Ik,Qk由式(1)计算得到。
2 多组数据比较的自相关判决方法
该方法的捕获过程如图1所示,先捕获强星并保持跟踪,弱星处理有别于常规的一次捕获,而是对同颗弱星,捕获R次,每次捕获对应时间为T(i)(i=1,…,R),两次捕获时间间隔不小于1s。

S′(τ,fd)表示剔除与强星频差为1kHz整数倍的捕获结果,fs为强星多普勒频移。

式中:max′(X,k)表示取X的前k个最大值。
每次捕获按式(3-4)记录SS(τ,fd)对应的多普勒频率与码相位,R次捕获完成后得到多普勒频率矩阵FR×M、码相位矩阵CR×M。设定统计量SD,其门限为th。按下述步骤完成多普勒频率和码相位的二维比较过程。
(1)以FR×M中第1个值为比较对象,记为F(m0,n0)按照式(5)确定码相位比较集合V,其中C(i,j)表示矩阵CR×M中对应第i行第j列的值。

(2)取V中第一个值为比较对象,记为C(i0,j0),与V中其他值一一比较,此以第2个值C(i1,j1)为例分析比较过程。C(i0,j0),C(i1,j1)对应捕获时间分别为T(i0),T(i1)。T(i0)和T(i1)时间间隔内弱星走过的理论码片数为

式中:fcode=2.046MHz,fL1=1 575.42MHz。

图1 多组数据比较捕获流程Fig.1 Flow chart of multi-groups data comparison method
(3)计算T(i0)和T(i1)时间间隔内弱星走过的实际码片数为

式中:N=2 046,(x)N表示x对N的求模操作。
(4)计算T(i0)和T(i1)时间间隔内强星走过的理论码片数为

式中:fs为T(i0)时刻强星的多普勒频率。
(5)计算T(i1)时刻的理论码相位为

(6)一次比较完成后,判决量SD按下列表达式变化

按式(6~10)完成V中所有值与C(i0,j0)比较,记录最后的SD。
若SD>th,则(F(m0,n0),C(i0,j0))为自相关峰对应多普勒与码相位;否则,依次取V中第2个值、第3个值,…为比较对象,重复步骤(2-6)。若V中所有值为比较对象都比较完,均不满足SD>th,则回归步骤(1),取FR×M中下一个频率值为比较对象,记为F(m0,n0),重复上述比较过程。若FR×M中所有值为比较对象比较完均不满足SD>th,则本轮捕获失败,开始下一轮R次捕获。
3 仿真及结果分析
仿真参数:中频4.123MHz,采样率16.367 667MHz,采用2比特数据量化,强信号-124dBm,弱信号有6个,对应卫星号为SV2~SV7,强度分别为-143,-144,-145,-146,-147,-148,单位均为dBm。-124dBm强星干扰下,-145dBm弱星捕获结果如图2所示。从图2可以看出,真正的自相关峰淹没在互相关峰中,常规的最大值门限检测法得不到正确的捕获结果。
对同颗弱星进行5次捕获,每次0.5s数据。每次记录相关结果的前20个值,即R=5,M=20。本文对常规最大值检测法MP,基于均方比的检测法MSR,峰值检测法PD和多组数据比较法MDC均进行了仿真。在仿真过程中,使用0.5s的数据对所有方法进行测试验证,结果如图3所示。干扰强信号强度分别为-126,-124,-122dBm时,多组数据比较法对弱星的检测情况如图4所示。
从图3可以看出,强星干扰情况下,对弱星的捕获,最大值门限检测法性能最差,弱星为-145dBm时,该方法检测概率为零。基于均方比和峰值相差两种检测方法性能差不多,对-145dBm弱星的检测概率小于2%。本文提出的多组数据比较法对-145dBm弱星的检测概率为83%。此方法中,必须选取合适的R和M,R和M增大,自相关峰发现概率会提高,同时也会加大运算量。
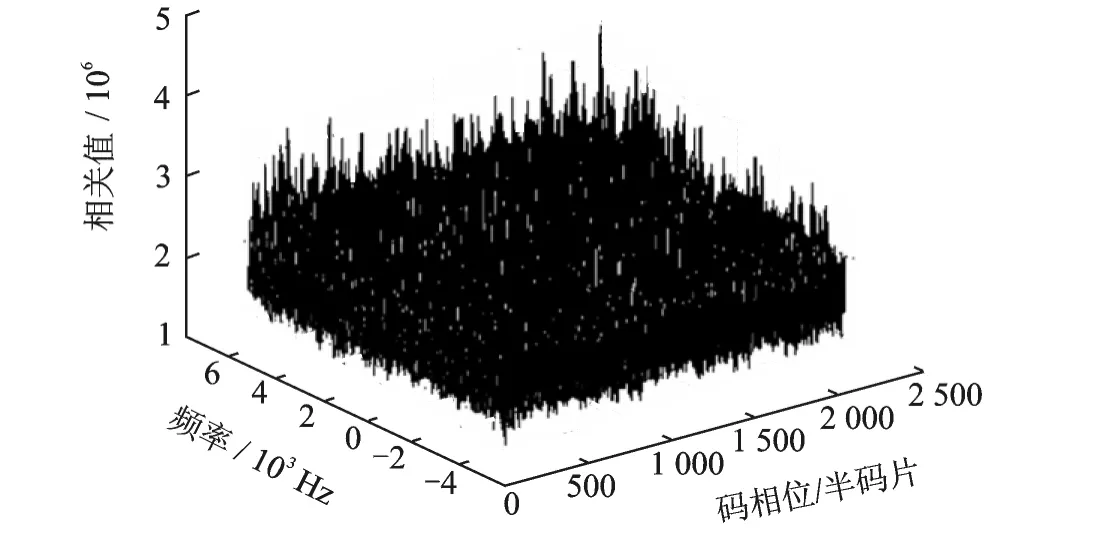
图2 强星干扰下弱星捕获结果Fig.2 Acquisition result with strong signal interference
从图4可各知,强星为-122dBm时,该方法对-143dBm弱星检测概率为93%,强星为-124dBm时,对-144dBm弱星检测概率为98%,强星为-126dBm时,对-146dBm弱星检测概率为97%。本文提出的多组数据比较自相关峰判定法对于强星能量大于-126dBm,且强弱信号能量差小于20dB的弱星检测概率可达93%以上,可以有效地解决自相关峰淹没在互相关峰中难以正确捕获的问题。
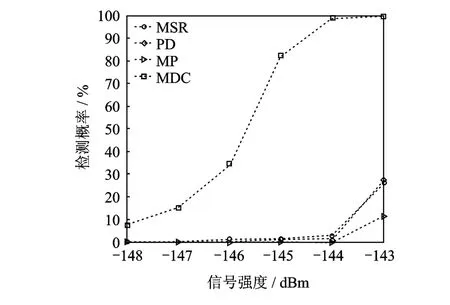
图3 互相关干扰下不同弱信号检测方法Fig.3 Results of different acquisition detection methods with cross-correlation interference
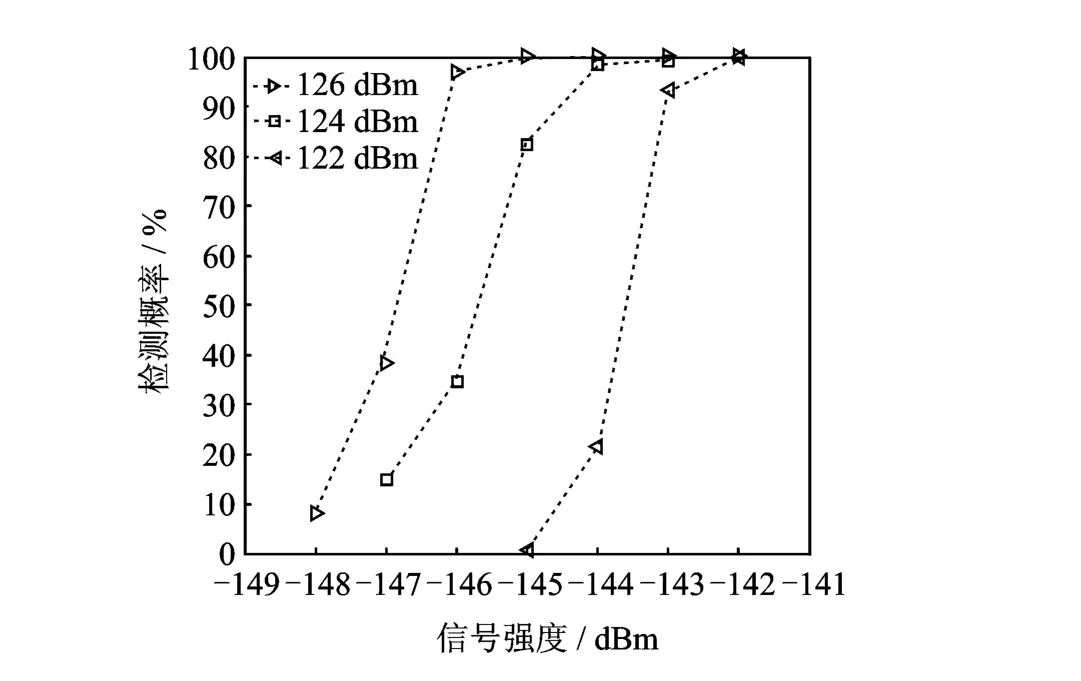
图4 不同强信号干扰下弱信号检测情况Fig.4 MDC results of different cross-correlation interference
4 结束语
由于互相关干扰影响,自相关峰可能淹没在互相关峰中,难以正确捕获。本文提出的多组数据比较法不需要重构强信号,对比基于均方比和峰值相差检测两种方法,能够有效提高互相关干扰下弱星捕获成功概率,仿真结果表明,强星为-124dBm时,该方法对-145dBm弱星的检测概率为83%,对GPS接收机弱信号捕获研究有实际意义。本文提出的多组数据比较法只考虑了单一强信号干扰,并且强、弱信号多普勒频率差异不为1 000Hz整数倍的情况,对于存在多个强信号干扰和强、弱信号多普勒频差为1 000Hz整数倍的互相关干扰问题还应继续研究。
[1] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:17-26.
Xie Gang.Principles of GPS and receiver design[M].Beijing:Publishing House of Electronics Industry,2009:17-26.
[2] Tsui J B Y.Fundamentals of global positioning system receivers:A software approach[M].2nd Edition.New Jersey:John Wiley &Sons,Inc,2005:83-84.
[3] 张文,饶谷音,韩松来,等.不同相干积分方法对 GPS弱信号捕获的影响[J].数据采集与处理,2012,27(1):38-44.
Zhang Wen,Rao Guyin,Han Songlai,et al.Effect of different noncoherent integration alternatives on weak GPS signal acquisition[J].Journal of Data Acquisition and Processing,2012,27(1):38-44.
[4] Glennon E P,Dempster A G.A review of GPS cross correlation mitigation techniques[C]//The 2004International Symposium on GNSS/GPS.Sydney,Australia:[s.n.],2004.
[5] 宋新刚,雷珺琳,路卫军.一种C/A码互相关干扰消除算法[J].计算机技术与发展,2011,21(1):1-4.
Song Xinjun,Lei Junlin,Lu Weijun.A C/A code cross-correlation interference cancellation algorithm[J].Computer Technology and Development,2011,21(1):1-4.
[6] 梁坤,王剑,施浒立.高灵敏度 GPS接收中的互相关减轻算法研究[J].电子学报,2008,36(6):1098-1102.
Liang Kun,Wang Jian,Shi Huli.Study on GPS cross correlation mitigation techniques in high sensitivity GPS receivers[J].Acta Electronica Sinica,2008,36(6):1098-1102.
[7] 刘杨,秦红磊,金天.考虑互相关干扰的GPS信号捕获门限设定方法[J].北京航空航天大学学报,2011,37(3):268-273.
Liu Yang,Qin Honglei,Jin Tian.Threshold setting method for GPS signal acquisition under cross-correlation effect[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(3):268-273.
[8] 刘扬,金天,李华军.微弱 GPS信号捕获中的远近效应消除方法[J].系统工程与电子技术,2011,33(5):1079-1084.
Liu Yang,Jin Tian,Li Huajun.Near-far effect cancellation in weak GPS acquisition[J].Systems Engineering and Electronics,2011,33(5):1079-1084.
[9] 曾丹丹,何文涛,徐建华.GPS信号并行捕获中互相关干扰的消除[J].微电子学与计算机,2010,27(11):113-116.
Zeng Dandan,He Wentao,Xu Jianhua.Mitigation of GPS cross correlation in parallel acquisition phase[J].Microelectronics and Computer,2010,27(11):113-116.
[10]Gustavo L R,Gonzalo S G.Detection and mitigation of cross-correlation interference in high-sensitivity GNSS receivers[C]//The 18th Annual IEEE International Symposium on Personal,Indoor and Mobile Radio Communications.[S.l.]:IEEE,2007.
[11]侯维玮.高灵敏度GNSS捕获技术研究[D].杭州:浙江大学,2010.
Hou Weiwei.Research on acquisition techniques of high sensitivity GNSS[D].Hangzhou:Zhejiang University,2010.
[12]Glennon E P,Dempster A G.A novel GPS cross correlation mitigation technique[C]//ION GNSS 18th International Technical Meeting of the Satellite Division.Long Beach:CA,2005.
猜你喜欢
当代医药论丛(2017年22期)2017-04-12 06:30:22
西部广播电视(2015年10期)2016-01-18 04:01:45
电子器件(2015年5期)2015-12-29 08:43:38
电源技术(2015年2期)2015-08-22 11:28:14
电测与仪表(2014年15期)2014-04-04 12:05:32
电测与仪表(2014年6期)2014-04-04 11:59:46
电测与仪表(2014年17期)2014-04-04 11:56:54
机械与电子(2014年2期)2014-02-28 02:07:47
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:49
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:49