基于ADAM S的FSAE赛车双横臂前悬架的优化*
2015-07-22 09:44李耀平胡立伟昆明理工大学交通工程学院云南昆明650500
小型内燃机与车辆技术 2015年2期
程 浩 李耀平 龚 航 胡立伟(昆明理工大学交通工程学院 云南 昆明 650500)
基于ADAM S的FSAE赛车双横臂前悬架的优化*
程浩李耀平龚航胡立伟
(昆明理工大学交通工程学院云南昆明650500)
摘要:依据UG软件建立FSAE“KMUST”赛车三维视图模型,获得双横臂前悬架的硬点坐标,利用多体动力学仿真软件ADAMS中Car模块建立双横臂前悬架模型并进行左右车轮平行跳动仿真试验。分析仿真结果,确定需要优化的前轮定位参数,将需优化的参数设定为优化目标,利用ADAMS/ Insight模块对设计目标进行灵敏度分析,优化灵敏度较高的因素。对比优化前、后的试验结果,证明优化后悬架的运动学特性得到提高。
关键词:FSA E双横臂前悬架A D A M S 优化仿真
引言
中国大学生方程式汽车大赛旨在由各大学车队的本科生和研究生构想、设计、制造,开发完成一辆小型方程式赛车并参加比赛。赛车必须在加速、制动和操控性方面具有非常优秀的表现,同时又必须具有足够的耐久性以顺利完成规则中提及的及比赛现场进行的所有项目[1]。赛车对操纵稳定性的要求很高,所以在赛车设计过程中,必须充分考虑赛车的操稳性。悬架运动学要揭示的是车轮在上下运动过程以及转向运动过程中,悬架的评价参数随车轮运动的关系[2]。本文研究悬架基本性能评价参数包括车轮前束角、车轮外倾角、主销后倾角和主销内倾角,其主要功能是保证转向轻便性和车辆直线行驶稳定性,同时车轮的前束角和外倾角的合理搭配可以减轻轮胎的磨损。本文对昆明理工大学KMUST车队2014年赛车进行ADAMS仿真分析,找出不合理的硬点并对其进行优化,为2015年赛车的悬架设计提供参考。
1 前悬架前轮定位
前轮定位包括:前轮前束角ε、前轮外倾角α、主销后倾角γ及主销内倾角β。如图1所示,前束角ε的作用是消除汽车在行驶过程中因车轮外倾而使两车轮向外扩张的不利影响,使前轮基本上平行地向前滚动。汽车行驶过程中,前束角ε变化范围过大,轮胎会发生磨损不均匀状况缩减轮胎使用寿命。主销后倾角γ和主销内倾角β都能够保持赛车在直线行驶时的稳定性,使汽车转向自动回正。但主销后倾角γ的回正作用与车速有关,而主销内倾角β的回正作用几乎与车速无关。高速时γ的回正作用起主导作用,低速时β起回正作用。所以,赛车在运动过程中,主销后倾角γ和主销内倾角β变化范围过大会导致赛车手难以操控车辆从而造成危险。

图1 前轮定位角
2 前悬架仿真模型的建立
FSAE赛车前悬架一般包括上横臂、下横臂、推杆、车轮、立柱、转向横拉杆、减震器和导向块。根据昆明理工大学KMUST车队成员2014年已经创建好的UG三维视图模型测得前悬架各个主要硬点坐标,如表1所示。与表1各硬点相对应的悬架拓扑结构,如图2所示。
根据以上前悬架硬点坐标和拓扑机构,在ADAMS/Car中建立模型,再依照图3所示各机构之间的运动学约束,对模型添加约束。并对ADAMS/Car中建立的模型进行装配,装配模型如图4所示。
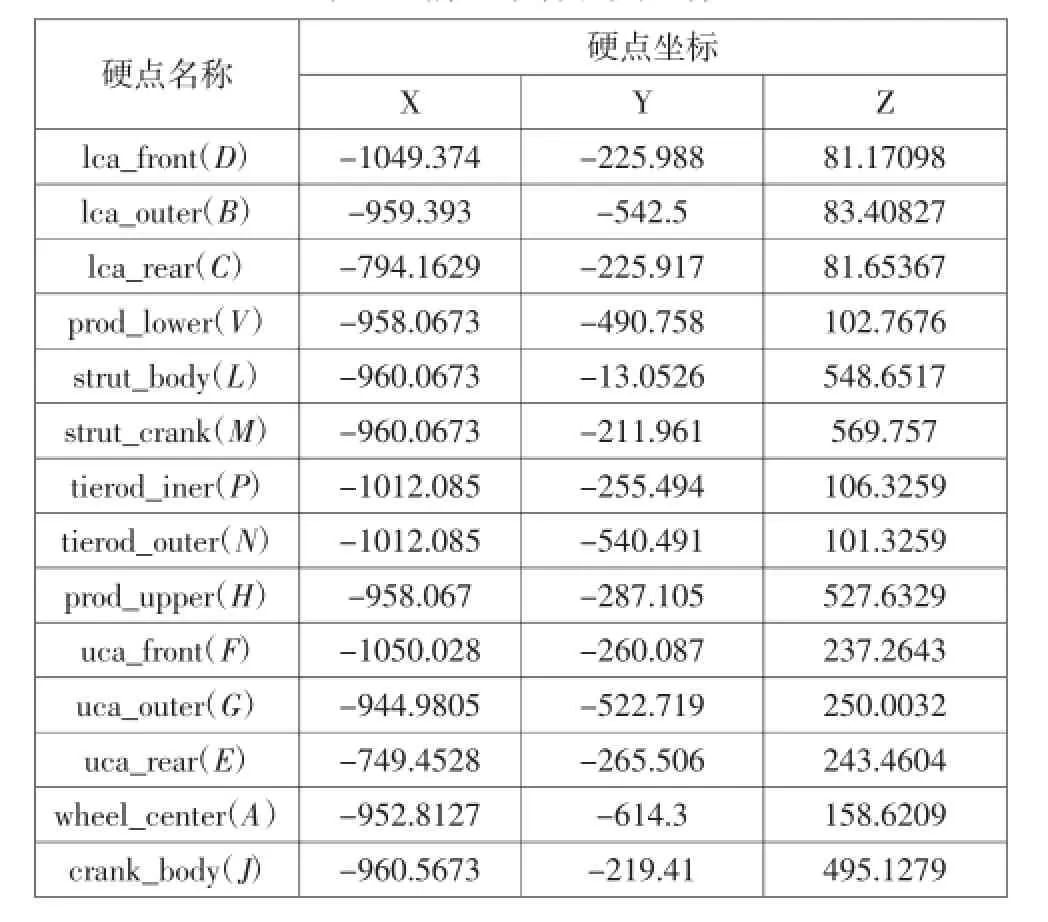
表1 前悬架各硬点坐标

图2 前悬架拓扑结构

图3 前悬架运动学框图

图4 前悬架仿真模型
3 前悬架仿真分析
在ADAMS/Car的仿真模型建立完成后,可以通过模块中提供的悬架仿真实验台加载各种载荷来模拟悬架实际运动工况。本文采用分析悬架特性最基本同时也是最常用的仿真方法,即左右车轮平行跳动仿真(ParallelWheel Travel)。在仿真之前应设定FSAE赛车的悬架参数,包括簧上质量、轮距、质心高度、轮胎刚度等和车轮定位参数,包括前束角、外倾角、主销内倾角和主销后倾角。大赛规则要求赛车轮胎上下跳动行程为25 mm。根据赛车实际运行情况,选择前轮跳动行程为30 mm。仿真结束后,在ADAMS后处理模块ADAMS/Post Processor中查看各车轮定位参数随车轮上下跳动的变化情况[3]。
3.1前束角与车轮上下跳动的关系
为了使汽车有好的操纵稳定性,对于前轮,束角的设计应是在车轮向上运动过程中,由零值向负值方向变化[2]。图5为前束角随车轮跳动变化曲线。如图所示,车轮在上下跳动过程中,前轮前束角变化范围为-0.5808°~1.4529°,变化量为2.0337°,变化范围较大,可能会引起赛车的侧倾和偏摆,需要对其进行化。
3.2前轮外倾角与车轮上下跳动的关系
外倾角在车轮跳动过程中产生变化会影响车辆的稳态响应特性以及直行稳定性。外倾角的设计通常是,在车轮向上运动时,前轮外倾角逐渐减小,而在向下运动时朝正值方向变化,并且在整个运动过程中变化不要大[2]。如图6所示,车轮在30mm跳动行程内上下平行跳动时,前轮外倾角在-0.1672°~-0.7572范围内变化,变化了0.59°。变化量较小,属于理想状态,无需对其进行优化。

图5 前束角随车轮跳动变化曲线

图6 外倾角随车轮跳动变化曲线
3.3主销后倾角与车轮上下跳动的关系
具有合适的主销后倾角使赛车具有一定的稳定力矩,既能保证赛车稳定直线行驶又能保证赛车手施加适当的力就可以克服此稳定力矩,转向比较轻便[4]。由图7可以看出主销后倾角数值的变化范围为4.4397~5.0559°,变化幅度为0.6162°。可以进一步优化。
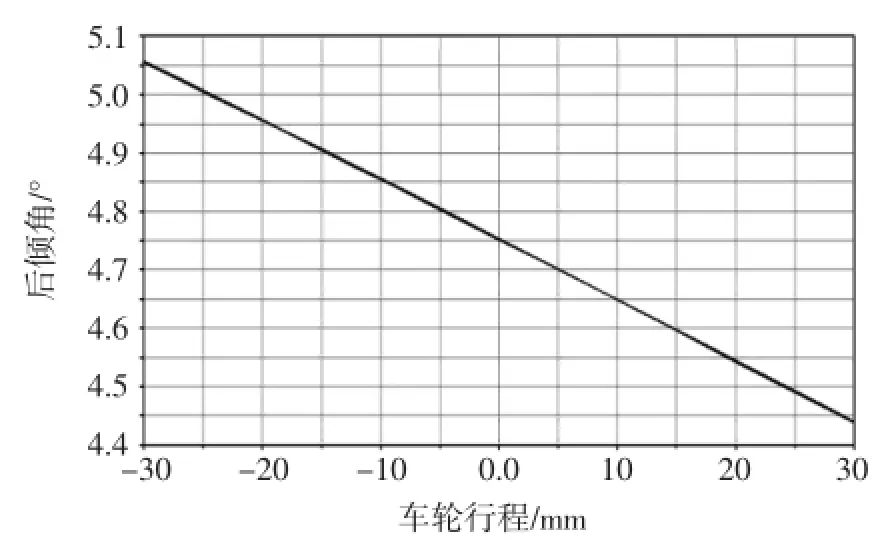
图7 主销后倾角随车轮跳动变化曲线
3.4主销内倾角与车轮上下跳动的关系
主销内倾角具有使汽车车轮自动回正的作用,变化范围不应过大或过小,否则会出现轮胎磨损的情况且不利于汽车的操纵稳定性。主销内倾角随车轮上小跳动情况如图8所示,即在整个跳动过程内倾角的变化由6.8135°到7.5691°。变化范围非常小,符合设计要求。

图8 主销内倾角随车轮跳动变化曲线
4 前悬架优化分析
通过对前悬架的仿真分析,得出各前轮定位参数随轮胎上下跳动的变化规律。由此得知,前束角和主销后倾角的数值随车轮上下跳动变化较大,前轮外倾角与主销内倾角随车轮跳动变化范围较小。运用ADAMS/Insight模块对前悬架进行优化以达到减小前轮定位参数的变化范围和提高赛车操纵稳定性的目的。
ADAMS/Insight模块可用于前悬架多目标优化试验设计及试验结果统计分析,则优化目标的性能可由以下综合目标函数表示。

式中:f(Yj)为优化目标(j=1,2,3…m);Yj是设计变量;n为设计目标数目;i——计算方程。
4.1前悬架参数灵敏度分析
系统的参数灵敏度是系统的参数变化对系统性
i=1能影响程度大小的指标。为了有效地进行参数的优化设计与修改,需了解哪些设计变量对目标函数的影响最大,即研究目标函数对设计变量的敏感程度[5]。导数计算是灵敏度分析理论方法的基础,若目标函数可导,其一阶灵敏度在连续系统可表示为[6]:

其中:f(X)是目标函数,Xi是设计变量。
由于前束角和主销后倾角数值变化范围较大,故选择这两个参数为设计目标。考虑到整车的布置和悬架的安装,选取上、下横臂与车架的铰接点和转向横拉杆外点为设计变量。转向横拉杆外点的确定可对立柱的设计提供参考。经试验发现,各点的X轴坐标值的变化对目标函数的影响很小,故选择这五个点的Y值和Z值为设计变量。为了避免杆件之间的干涉,通常设置设计变量的变化范围为-5 mm~ 5 mm。试验分析的结果可以以网页的形式查看和保存。分析结果显示了因素的灵敏度,其中正值表示正效应即设计目标随着设计变量的变大而变大,负值则表示设计目标随着设计变量的增大而变小[4]。图9和图10为各坐标值对前束角与主销后倾角的影响大小。

图9 设计变量对前轮前束角的影响

图10 设计变量对主销后倾角的影响
根据分析结果,转向横拉杆外点对目标函数都有很大影响,尽量避免修改。根据影响效果,确定对上摆臂与车架相连的前后铰接点Z轴坐标和横拉杆外点Z轴坐标进行修改。如表2所示为设计变量的修改。

表2 设计变量的优化
4.2优化前后结果对比
图11和图12分别为优化前后设计目标变化对比图,实线为优化前轮胎平行上下跳动的仿真曲线,虚线为优化后的仿真曲线。由图可知优化后的目标函数变化范围明显变小,其中前束角变化范围为0.9652°,更有利于车轮平行的向前滚动。主销后倾角变化范围为0.1276°,车手更易控制赛车。所以优化后的前悬架得到一定的改善,更有利于赛车的操纵稳定性。
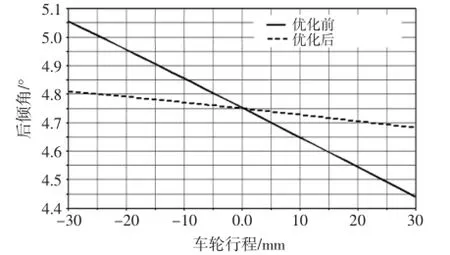
图11 优化前后主销后倾角变化曲线

图12 优化前后前束角变化曲线
5 结论
利用ADAMS/Car建立FSAE前悬架模型并进行左右车轮平行跳动仿真试验,结果显示前悬架前束角和主销后倾角变化范围较大,需对其进行优化。利用ADAMS/Insight对上述两设计目标进行优化试验,根据参数灵敏度试验结果确定需进行优化的设计变量,即上摆臂与车架相连的前后铰接点Z轴坐标值与横拉杆外点Z轴坐标值。优化后的试验结果表明,前束角数值和主销后倾角数值变化范围分别为-0.1322°~0.833°与4.6828°~4.8104°,变化幅度明显变小。达到优化的目的,前悬架的性能得到一定的提高。
参考文献
1李理光.中国FSC大赛规则 [M].中国大学生方程式汽车大赛规则委员会,2014
2高晋.基于虚拟样机技术的悬架K_C特性及其对整车影响的研究[D].长春:吉林大学,2010
3陈志伟,董月亮.MSCAdams多体动力学仿真基础与实例解析[M].北京:中国水利水电出版社,2012
4李嫚.FSAE赛车悬架的优化设计及分析 [D].哈尔滨:哈尔滨工业大学,2011
5雷雨成,李峰.橡胶衬套刚度对悬架系统影响的研究[J].上海汽车,2004(11):30,31,34
6赵振东,雷雨成,袁学明.汽车悬架橡胶衬套刚度的优化设计[J].机械科学与技术,2006,25(2):168~170
7关文达.汽车构造[M].北京:机械工业出版社,2012
中图分类号:U463.1
文献标识码:A
文章编号:2095-8234(2015)02-0066-05
收稿日期:(2015-01-21)
*基金项目:赛车底盘系统优化设计(6493-20140069),交通运输云南省专业综合改革试点项目(10968-76)。
作者简介:程浩(1990-),男,硕士研究生,研究方向为汽车系统动力学。
Optim ization Analysisof Double-W ishbone Front Suspension Parameter of FSAERacing Car w ith ADAM S
Cheng Hao,LiYaoping,Gong Hang,Hu Liwei
Kunming University of Scienceand Technology(Kunming,Yunnan,650500,China)
Abstract:3D UGmodel of FSAE“KMUST”racing carwas designed.The key hard point coordination of the front suspension was obtained.Themulti-body dynamic model of double-wishbone front suspension was established based on ADAMS/Car.According to ParallelWheel Travelsimulation test,the frontwheel position parametersneeded tobe optimizedwereascertained.Then the influence factorsof these parameters sensitivity were analyzed by using ADAMS/Insight.Contrasting the resultwith the former proves that the kinematicscharacteristicsof the frontsuspensionwere improved. Keywords:FSAE,Double-wishbone frontsuspension,ADAMS,Optimization,Simulation