输电线路清障装置系统设计
2015-07-21 22:41韦丹静王德龙韦贤亮孔繁业
中国高新技术企业 2015年28期
韦丹静 王德龙 韦贤亮 孔繁业

摘要:输电线路清障机构是当前线路维护中的重点研究对象之一,是一个涉及多个学科的复杂机电一体化系统。文章从实用性出发,研究了一种输电线路巡线清障装置,采用双轮支撑同侧结构设计,外加圆形锯盘清障的工作方式,利用视频信息采集与传输、地面遥控等方式对巡线过程的装置动作操控以及对是否清理障碍物等做出决策。
关键词:输电线路;清障装置;巡线装置;机电一体化;动作操控 文献标识码:A
中图分类号:TP242 文章编号:1009-2374(2015)28-0022-02 DOI:10.13535/j.cnki.11-4406/n.2015.28.011
1 概述
高压输电线路是长距离输配电的主要方式,由于线路长期暴露在自然环境中,会受到各种恶劣天气等不可控因素的影响,可能会导致线路元件故障,威胁电力系统的安全稳定运行,因此输电线路巡检就成了一项基础但非常重要的工作。但随着输电线路数量的爆炸式增长,输电线路的布线也更加复杂,靠传统的人工巡检方式已经不足以满足线路巡检需要。因此研发自动化的输电线路巡检装置就具有很强的必要性,同时也成为了当前研究的热点之一。
国内各科研机构、高等院校等也在巡线机器人方面做出了很多研究,但很大程度上遭遇机器人机械结构和自主控制方面的难题,在机器人自主控制方面面临实用化障碍,但输电线路的巡线清障需要已经非常迫切。因此本文从实际出发,即以输电线路巡线清障装置为研究对象,设计了一种基于地面操控的巡线清障装置,并从系统设计的角度对该装置的功能进行设计,使之满足输电线路巡线清障的需求。
2 巡线清障装置的总体功能设计
本次设计中的主要设计任务为:采用远程遥控方式,代替线路运行人员对导线异物进行带电消除,并对探视图像进行分析和判断,及时对线路进行探伤并完成异物消除工作,项目的实施可解决输电线路档距中间漂浮异物无法带电消除的问题,大幅提高线路清障的效率,全面提高线路的可靠性和安全稳定性。
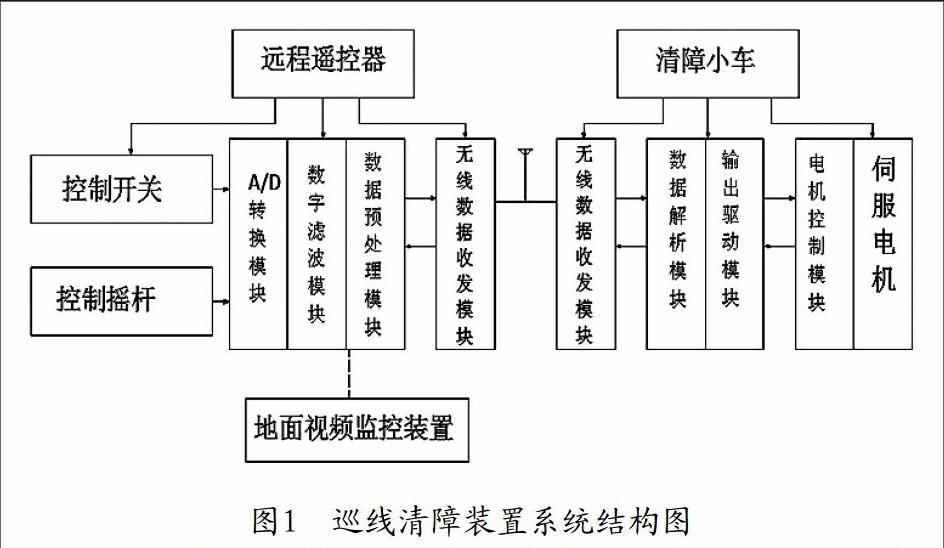
为完成上述设计任务,本文中所设计的巡线清障装置可简称为线路异物清障车系统(下文简称清障车),该装置是一个复杂的机电一体化系统,涉及机械结构、遥控、通信、多传感器信息融合、电源技术等多个领域。在上述各子系统中,关键问题之一是机械机构、地面遥控等,现分别对各主要功能模块进行设计,各主要部分的组成如图1所示:
在完成系统总结构设计的基础上,现分别对各主要部分进行设计。
3 机械结构设计
清障车在线路上的工作方式特殊,因此在设计时应充分考虑其工作环境的特殊性。在本次设计中,主要设计要求包括:(1)从实用的角度要求机构小巧、紧凑、轻质,便于携带及上下线操作,在故障情况下,应防止除异物清障车摔落;(2)从运动控制的角度要求机构的自由度尽量少,能实现解耦控制,并且具有符合要求的控制精度。由于清障装置还应具备清障功能,故在机械机构设计时,按行走机构和清障机构两部分来进行描述。
3.1 清障装置行走机构设计
清障装置的行走机构的主要功能是完成在输电线路上的稳定行走和翻越障碍,在功能设计方面主要包括:(1)具有三个速度等级和前进、后退两个方向功能,线上清障机采用双轮支撑同侧结构设计,使得上线更为容易,同时配合大摩擦系数的行走轮及大转矩电机,使车体具备一定的爬坡和制动能力;(2)行走轮经2个电机分别同时驱动,提高装置在线路上行走的稳定性,同时也可以确保动力可靠,不至于出现一个轮被卡的情况;(3)电机具备自锁性,当马达没电的情况下可自动锁定,无法转动;(4)减速箱输出轴方向与马达轴方向垂直设计,便于安装带动设备;(5)在输电线路带电运行情况下对输电线路进行检测,抗电磁干扰能力强、传输距离远;(6)设备体积小、重量轻、结构设计紧凑、功能齐全、操作方便、安全可靠。
3.2 清障装置的清障机构设计
当地面操作人员确定需要进行清障操作时,就需要用清障装置的清障机构来完成该工作。在本设计中,清障装置的主要清理任务是清理输电线路档距中间漂浮异物,在设计时采用可地面控制的圆形锯盘来实现。其工作原理是采取高速直流电机带动圆锯片,利用高速转动将异物打碎,同时增加锯齿功能;对该圆形锯盘采用远程遥控控制方式,以电子调速模块控制,实现对小型圆盘锯的控制。
4 视频系统设计
本设计中清障车工作流程为:首先通过绝缘斗臂车或人工爬到线塔上用吊装的方式将小车安装到相线上;然后地面监控计算机或者控制装置发出开机控制命令,清障车本体计算机在接收到运行命令后,驱动清障车沿输电线行走;行走过程中,检测装置不断检测前方异物的情况,同时视频对线路进行拍摄,拍到的图像通过无线设备实时传输到地面,地面工作基站对线路情况进行判断,决定是否对线路上的异物进行清除;对清障车本身的工作状态进行监控,决定是否对清障车的运动给予干预。
由其工作流程可见,清障车传回的视频信息对于地面人员决策至关重要。因此本设计中很自然地就需要设计视频系统。在视频系统中,主要的组成部件是摄像头和无线通信模块。其中摄像头方面为了满足地面控制需要,需满足高清需求,这方面可供选用的USB摄像头是比较多的,很容易满足设计要求。在无线通信模块方面,主要是选用具有多功能支持的WIFI模块,支持IEEE802.1 1b/g无线标准、支持基础网和自组网、支持多种ICMP、DHCP、DNS和HTTP等。这方面可供设计选型的无线通信模块也比较多,本次设计中选用的是Marvel 8686wifi模块。
5 地面操控系统设计
由前文对清障车的工作流程描述可见,清障车要完成其设计任务的另一关键环节是地面操作人员依据清障车传回的视频数据做出决策,因此地面操控系统的设计是重点之一。本文中所设计的地面操作系统主要通过接收清障车返回的视频数据,地面操作人员依据视频信息做出决策,以手柄/按键的方式来实现对线上清障车的运动或清障操作。地面操控系统的主要结构如图2所示:
在地面操控系统中,需要以一个高性能的处理器为核心,并为无线网卡、视频接收、控制信息发送、显示屏等附属部件提供数量充足、性能稳定的接口。在本文的设计中,主要的硬件接口预留为:(1)LCD、LED、触摸屏,接口该类接口是显示清障车传回数据的关键部件;(2)网络接口,这类接口包括以太网接口和无线网卡接口,其中以太网接口与处理器直接相连,无线网卡则通过中间USB接口间接与处理器相连;(3)电源接口;(4)串口,为了为系统容量扩充留下余地,还特地留了Nor Flash接口、Nand Flash接口以及SDRAM接口。
6 结语
输电线路巡线装置的设计是一个复杂的机电控制问题,涉及到机械结构、地面控制等多个方面,是值得深入研究的问题。本文从实用的角度设计了基于地面操控的巡线清障装置,在巡线装置返回实时准确的视频数据的前提下由地面控制人员决定装置的行走和清障动作,可满足实用需要,以后将考虑进一步提高装置的智能化水平,以具备自我控制的巡线机器人作为研究目标。
参考文献
[1] 吴功平,肖晓晖,郭应龙,胡基才.架空高压输电线自动爬行机器人的研制[J].中国机械工程,2006,17(3).
[2] 左岐,谢植,梁自泽,唐健隆,孙德辉,刘仁学.巡线机器人的发展与应用[J].机器人技术与应用,2007,(2).
[3] 吴功平,肖晓辉,肖华,戴锦春,鲍务均,胡杰,等.架空高压输电线路巡线机器人样机研制[J].电力系统自动化,2006,30(13).
[4] 田乐.基于地面操控的高压输电线路巡线装置研究[D].兰州理工大学,2012.
[5] 易兴邦.高压巡线机器人控制系统研究[D].江苏科技大学,2012.
(责任编辑:周 琼)
猜你喜欢
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
考试周刊(2016年77期)2016-10-09