自主避障爬行机器人开发
2015-07-21 02:00马春港等
现代商贸工业 2015年15期
马春港等
摘 要:自主避障爬行机器人是一个由反馈系统与控制系统组成的机器人系统。基于该机器人系统,详细阐述了机器人的机械组成、反馈系统和控制系统等。机器人的反馈系统与控制系统分别选用了欧姆龙E3Z-D61光电传感器与西门子S7-200系列PLC作为核心,最终实现了机器人的自主避障运动。
关键词:自主避障机器人反馈;PLC控制
中图分类号:TB
文献标识码:A
文章编号:1672-3198(2015)15-0177-01
1 引言
随着人类认知领域的拓展和研究水平的深化,人类的作业环境变得越来越复杂,如辐射、深海领域等。这些环境远远超出了人类的劳动条件可以承受。于是人们开始寻找一种替代人完成的工作设施,最终发明了机器人。机器人是拟人化的机器,可替换人类一部分工作,从处理的速度和可靠性等问题上,它们甚至超越了人。自主避障是衡量智能移动机器人智能化程度的重要指标,需要机器人本体、感知单元、智能算法等多方面综合协调,在机器人应用技术日益满足各种实际需求的过程中,自主避障机器人得到国内外学者的广泛关注。
2 机器人的机械组成
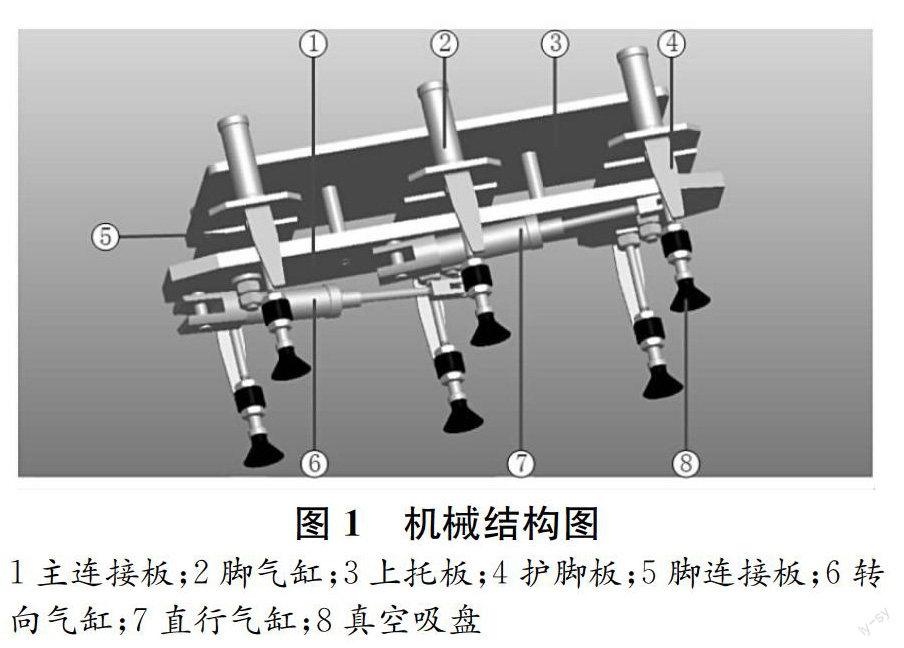
本文所述自主避障机器人的机械部件主要有气缸、真空吸盘、托板、脚连接板、主连接板、护脚板及连接部件等,见图1。
3 反馈系统的开发
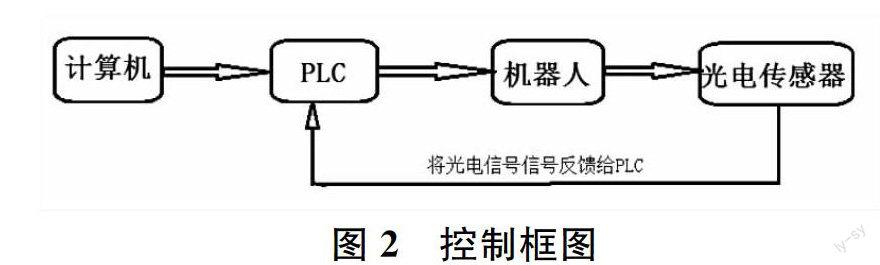
对于避障机器人的研发,其关键在于完善的反馈系统。本文所述自主避障机器人采用了漫反射型光电开关作为反馈系统的核心进行其反馈系统的开发。漫反射型光电开关是当开关发射红外线等类型的光束,并照射到物体时,产生漫反射,在漫反射光电开关中,其发射器和接收器构成单个的标准部件,当有充足的光被接收器接收时,开关的状态便发生相应变化。机器人最终采用了欧姆龙公司的E3Z-D61光电开关作为反馈系统的核心,该开关属于漫反射型光电开关且具有可调节的检测距离,方便调节以适应机器人的要求;光源为红外线,无污染且不会对人体等造成损害。机器人反馈控制框图如图2所示。
4 控制系统的开发
4.1 PLC选型与I/O点分配
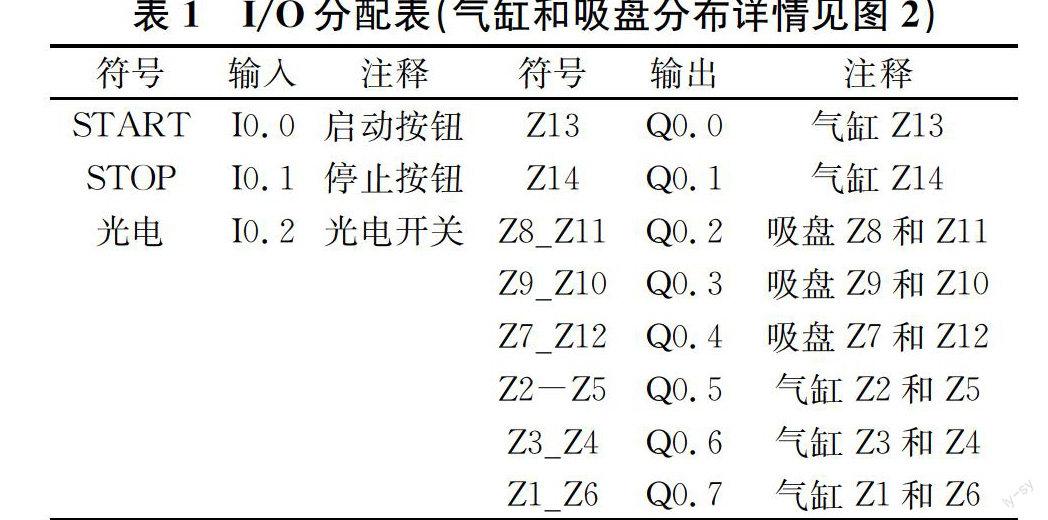
自主避障机器人是以西门子S7-226 PLC作为控制系统的核心。它属于西门子S7-200系列的PLC,S7-200系列 PLC是小型PLC,在中小规模控制系统中广泛应用,而且它结构简洁、功能强、性价比高,根据机器人的机械结构和机器人反馈系统的控制框图,确定了PLC的I/O点分配。
4.2 自主避障机器人的运动顺序
机器人的运动顺序是由PLC的输出点的顺序决定的。PLC通过顺序控制机器人上的电磁阀来实现机器人的自主避障运动(如图3所示的自主避障机器人的三维简图)。默认状态机器人是一直保持前进的,当光电开关检测到障碍物时,机器人会自动转向,然后继续前进,实现自主避障运动。
自主避障机器人的运动顺序如下:①开始时,PLC通过控制Z3、Z4足所对应的电磁阀将机器人的Z3、Z4两足升起;②Z1、Z6两足升起,Z14所控制的直行气缸伸出,Z1、Z6两足落下,Z7、Z12真空吸盘吸附地面,实现Z1、Z6两足向前移动;③Z2、Z5两足升起,Z14所控制的直行气缸缩回,Z2、Z5两足下降,Z8、Z11真空吸盘吸附地面,实现Z2、Z5两足向前移动;④当检测到障碍物时,光电开关收到反射信号,Z7、Z8、Z11、Z12吸盘松
开,Z1、Z2、Z5、Z6足升起,转向气缸Z13伸出,机器人实现右转,使用计数器使此步骤重复4次,使机器人转过90度。⑤程序跳转到①,机器人继续前进。
4.3 机器人的编程与调试
依据机器人的运动顺序编写程序,部分程序如下:
LD 启动按钮
AN 停止按钮
S Z3和Z4足升起,1
LSCR 机器人右转
LD SM0.0
S 电磁阀Y13,1
TON T37,5
LD T37
SCRT Z1和Z6足下降
SCRE
通过对机器人自主避障程序的分步调试以及多次的实际运行,证实程序能稳定实现自主避障机器人的自主避障运动。
5 结束语
随着人类社会和科技的不断向前发展,机器人已经成为人类生活和工作中不可或缺的一环。而且自主避障机器人已经开始在家庭生活中应用,例如:家用扫地机器人等。另外,自主避障机器人还能代替人类探索恶劣环境,因此避障机器人得到了国内外广泛的研究。
参考文献
[1]耶晓东.简易避障机器人的设计[J].仪器仪表用户,2009,(01):52-54.
[2]罗乾又.移动智能机器人自主避障的研究与实现[D]绵阳:西南科技大学,2011.
猜你喜欢
锻压装备与制造技术(2021年3期)2021-08-13
商品与质量(2020年33期)2020-11-07
现代商贸工业(2018年31期)2018-12-08
成都信息工程大学学报(2018年6期)2018-03-21
能源(2017年7期)2018-01-19
电子测试(2017年11期)2017-12-15
国防制造技术(2016年2期)2016-03-12
电源技术(2015年5期)2015-08-22
现代教育技术(2015年1期)2015-02-26
自动化博览(2014年12期)2014-02-28