
基于高斯混合势化概率假设密度的脉冲多普勒雷达多目标跟踪算法
2015-07-12 14:08吴卫华江晶冯讯刘重阳
电子与信息学报 2015年6期
吴卫华江 晶冯 讯刘重阳
(空军预警学院 武汉 430019)
基于高斯混合势化概率假设密度的脉冲多普勒雷达多目标跟踪算法
吴卫华*江 晶冯 讯刘重阳
(空军预警学院 武汉 430019)
为在新兴的随机有限集(RFS)框架下充分利用多普勒信息跟踪杂波环境下的多目标,该文提出基于高斯混合势化概率假设密度(GM-CPHD)的脉冲多普勒雷达多目标跟踪(MTT)算法。该算法在标准GM-CPHD基础上,在使用位置量测更新状态后,再利用多普勒量测进行序贯更新,可获得更精确的似然函数和状态估计。仿真结果验证了该算法的有效性,表明在GM-CPHD基础上引入目标的多普勒信息可有效抑制杂波,显著改善跟踪性能。
多目标跟踪;随机有限集;概率假设密度;高斯混合势化概率假设密度;脉冲多普勒雷达
1 引言
现代机载预警雷达普遍采用脉冲多普勒体制,如何更好地利用机载脉冲多普勒雷达获取的多普勒观测进行多目标跟踪具有重要意义。
传统基于数据关联的多目标跟踪算法,如S维(S-Dimensional, S-D)分配算法,联合概率数据关联(Joint Probabilistic Data Association, JPDA),多假设跟踪(Multiple Hypothesis Tracking, MHT)等,由于数据关联步骤的运算复杂度较高,难以胜任大规模的目标数目及其状态均具有时变性质的实时多目标跟踪问题。近年来,一类基于随机有限集(Random Finite Sets, RFS)的跟踪算法[1,2]应运而生,受到跟踪界的极大关注。
在传统算法中,多普勒信息对跟踪性能的改善一直备受重视[3]。在随机有限集框架下,文献[4]考虑到多普勒盲区的影响,通过建模检测概率为目标状态的函数,获得了更稳定的目标数目估计。不过,该算法仅利用了与多普勒盲区有关的最小可检测速度(Minimum Detectable Velocity, MDV)信息,并未利用多普勒信息。文献[5]基于高斯混合概率假设密度[6](Gaussian Mixture Probability Hypothesis Density, GM-PHD)研究了利用多普勒信息进行航迹起始及杂波抑制的问题。然而,在PHD滤波器中,由于泊松分布的均值与方差相等,因此,当目标数目较多时,在漏检或较高虚警密度下,会造成目标数目估计的强起伏,使得估计不可靠[7]。文献[7]提出的势化概率假设密度(Cardinalized Probability Hypothesis Density, CPHD)滤波器较好地克服了该问题,具有比PHD更优的性能,其已扩展到可适用于航迹形成[8,9]、未知出生强度[10,11]、时变杂波密度[12]、传感器配准[13]和分布式融合结构[14,15]条件下。然而,尚未有文献在GM-CPHD框架下引入多普勒信息来改善跟踪性能,为此,本文研究在更为复杂的CPHD式子中引入多普勒信息的问题,提出了基于GM-CPHD的脉冲多普勒雷达多目标跟踪算法。通过仿真验证了算法的有效性,结果表明,多普勒信息的引入可有效抑制杂波干扰,显著改善跟踪精度。
2 多目标滤波问题的RFS描述
考虑x-y平面内多目标跟踪场景。在k−1时刻,存在M(k−1)个目标,它们的状态为Xk−1,1, Xk−1,2,…,Xk−1,M(k−1)∈χ。在下一时刻,现存目标可能消失或者继续存活,新的目标可能出现或者由现有目标衍生出来,上述过程得到M(k)个新状态Xk,1,Xk,2,…,Xk,M(k ),其中,Xk,i=[xk,iyk,i]T。假定k时刻传感器接收到N(k)个量测zk,1,zk,2,…, zk,N(k)∈Z,其中仅有部分量测来自于目标,其余为虚警或杂波。由于k时刻对应的目标状态集合以及量测集合的无序性,它们可自然地用有限集合表示:

其中,F(χ)与F(Z)分别是χ与Z的所有有限子集的集合。
给定k−1时刻多目标状态Xk−1,则k时刻的多目标状态Xk由存活目标和新生目标的集合的并集给出。

其中,Γk代表k时刻新生目标的RFS。Γk的实际形式取决于具体问题。Sk|k−1(Xk−1,i)是k时刻存活目标由Xk−1,i演化而来的目标RFS,每一Xk−1,i∈Xk−1要么以概率pS,k(Xk−1,i)继续存在,或者以概率1−pS,k(Xk−1,i)消失。假定目标存在概率与状态无关,即

以目标存在为条件,从状态Xk−1,i转移到Xk,i的概率密度函数(Probability Density Function, PDF)为

式中,N(⋅;m,P)表示均值m和协方差P的高斯密度,Fk−1为状态转移矩阵,Qk−1为过程噪声协方差。
给定多目标状态Xk,传感器接收的多目标量测Zk可由目标产生的量测和杂波的并集表示

其中,Kk为杂波的RFS,其实际形式与具体问题有关;Θk(Xk,i)表示检测到的目标量测RFS,当目标以检测概率pD,k(Xk,i)被检测时,Θk(Xk,i)取{zk,j}中某元素,否则,当以概率1−pD,k(Xk,i)漏检时,Θk(Xk,i)为∅。假定检测概率与状态不相关,即

以检测到目标为条件,观测zk,j来自于状态Xk,i的量测方程为

其中,nk,j~N(nk,j;0,Rk)为均值0,协方差Rk=的高斯白噪声(假定多普勒噪声与位置噪声相互独立)。,分别表示位置观测与多普勒观测值,它们的似然函数分别为

其中,Hc,k=diag(I2,02)为位置观测矩阵,In,0n分别表示n×n的单位矩阵和全零矩阵。
3 带Doppler量测的序贯GM-CPHD算法
假定每个目标运动过程及产生的量测独立,预测的多目标RFS服从泊松分布,杂波也服从泊松分布,并与目标量测独立,新生目标的RFS的强度为高斯混合形式:

其中,Jγ,k为出生强度分量数目,权值、均值、协方差,i=1,2,…,Jγ,k是给定的模型参数,它们共同决定出生强度的形状。
给定k−1时刻的后验势分布pk−1及高斯混合形式的后验强度υk−1为

则k时刻的预测势分布pk|k−1及预测强度υk|k−1分别为[7]
获取k时刻观测后,可得更新后验势分布和强度函数分别为[7]
为在GM-CPHD滤波器中并入多普勒信息,可采取位置和多普勒量测联合滤波或位置和多普勒量测序贯滤波方法,为更有效地利用多普勒信息,这里采用后者,即,首先利用位置量测进行状态更新,接着使用多普勒量测进一步更新状态,在得到更精确的状态估计和似然函数后,最后利用位置和多普勒量测信息计算权重。算法具体步骤为:
其中


其中

式中

4 仿真实验与分析
考虑到本文侧重多目标跟踪的研究,不妨假定多目标在x-y平面内做匀速直线运动。设定目标的初始状态及其起始、终止时间见表1。传感器监视区域[−1000 m 1000 m]×[−1000 m 1000 m],对应面积V=4×106m2,假定pD,k=0.98,Rc,k=I2, σc=10m,σd=0.5 m/s ,vmax=35 m/s2。在GMPHD和GM-CPHD滤波器中,pS,k=0.99, Fk−1=, Δ=1 s, σv=5m/s。新生目标出生强度设计为m= [0 m,0 m,0 m/s,0 m/s]T, m=[400 m,−600 m,0 m/s,0 m/s]T, m=[−200 m,800 m,0 m/s,0 m/s]T, m=[−800 m,−200 m,0 m/s,0 m/s]T,Jγ,k=4, w=0.03, P=diag([10 m2,10 m2,10 m2/s−2,10
m2/s−2]T),i=1,2,3,4。状态提取过程中用到的合并参数[6]有:权值门限T=10−5,合并门限U=4,最大高斯分量数目Jmax=100。GM-CPHD中势分布近似截取参数[7]Nmax=100。
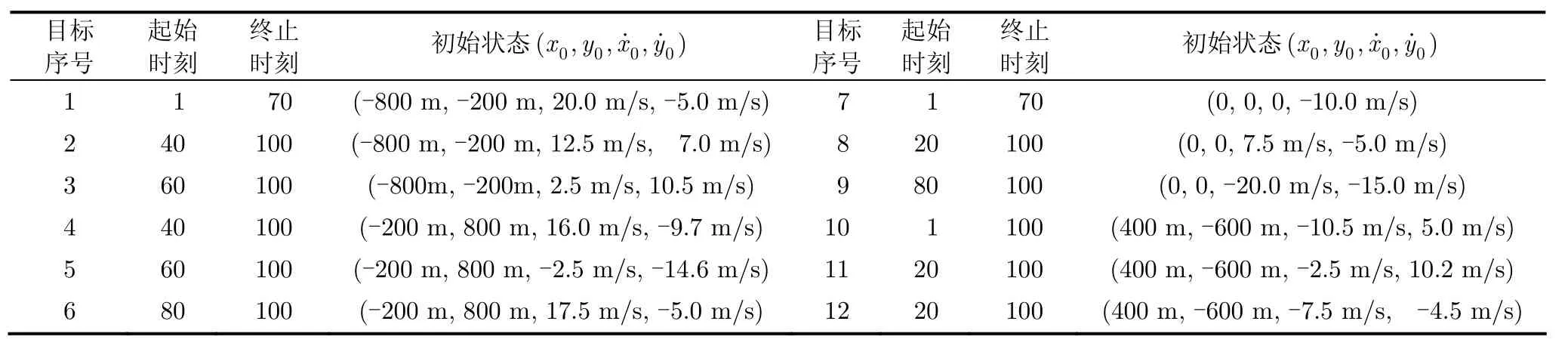
表1 各目标初始状态及其起始、终止时间
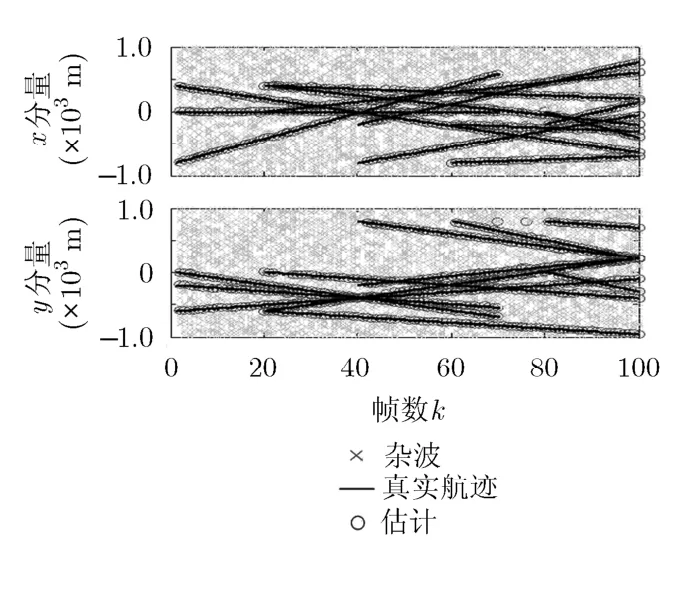
图 1 GM-CPHDwD算法多目标跟踪典型结果
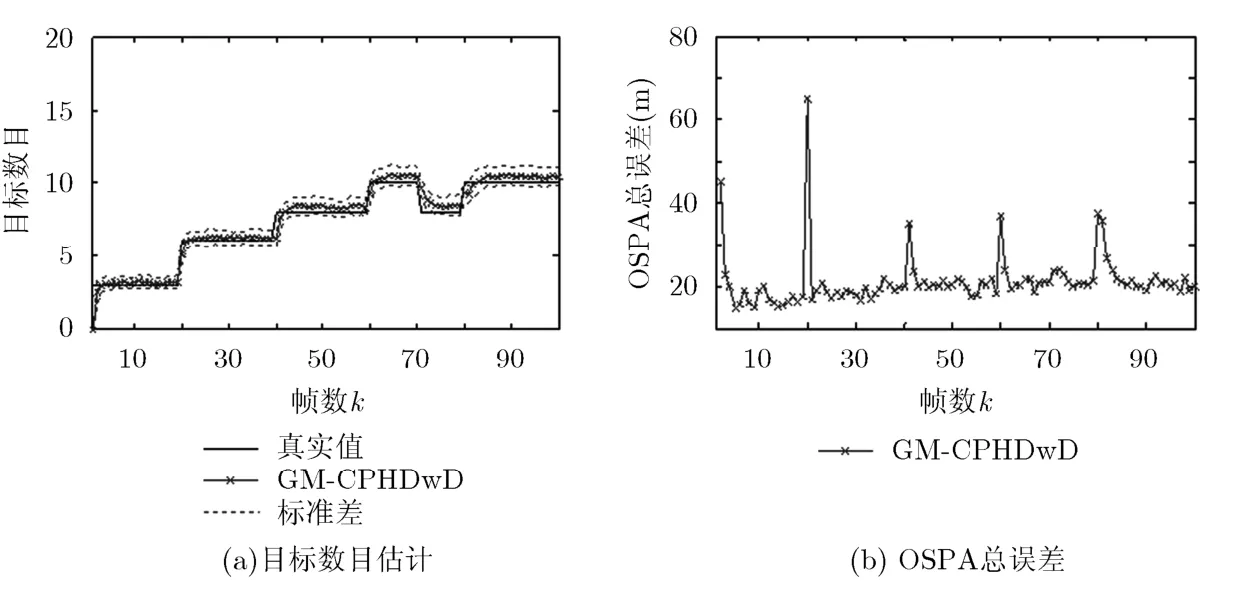
图 2 不同时刻下GM-CPHDwD算法跟踪性能
为验证GM-CPHDwD中引入多普勒信息对杂波抑制和性能改善的能力,分别记不带Doppler信息的标准GM-PHD[6]和GM-CPHD[7]算法为GMPHDwoD和GM-CPHDwoD,以及文献[5]提出的带多普勒信息的GM-PHD算法为GM-PHDwD。图3给出了4种算法在λc=0,0.25×10−5m−2,…,1.50 ×10−5m−2不同杂波密度条件下的OSPA总误差,以及OSPA中势估计误差和定位误差[16](对应的杂波平均数目为0,10,…,60)。总体而言,多普勒信息的引入对GM-PHD和GM-CPHD均显著改善了性能,且杂波密度越高,性能改善越为明显,表明多普勒信息的利用可有效抑制杂波干扰;相比GMPHDwD,图3(a)说明GM-CPHDwD在定位精度上稍差,但图3(b)表明其在势估计性能上又优于GMPHDwD,从而,从整体OSPA角度而言,GMCPHDwD优于GM-PHDwD,见图3(c)。
5 结束语
为在新兴的随机集框架下充分利用多普勒信息,本文提出了基于GM-CPHD的机载多普勒雷达多目标跟踪算法,仿真结果证明了该算法的有效性,表明利用多普勒信息可有效抑制杂波干扰,显著改善跟踪性能。下一步工作是研究在多普勒盲区条件下的基于随机有限集的机载多普勒雷达多目标跟踪算法。
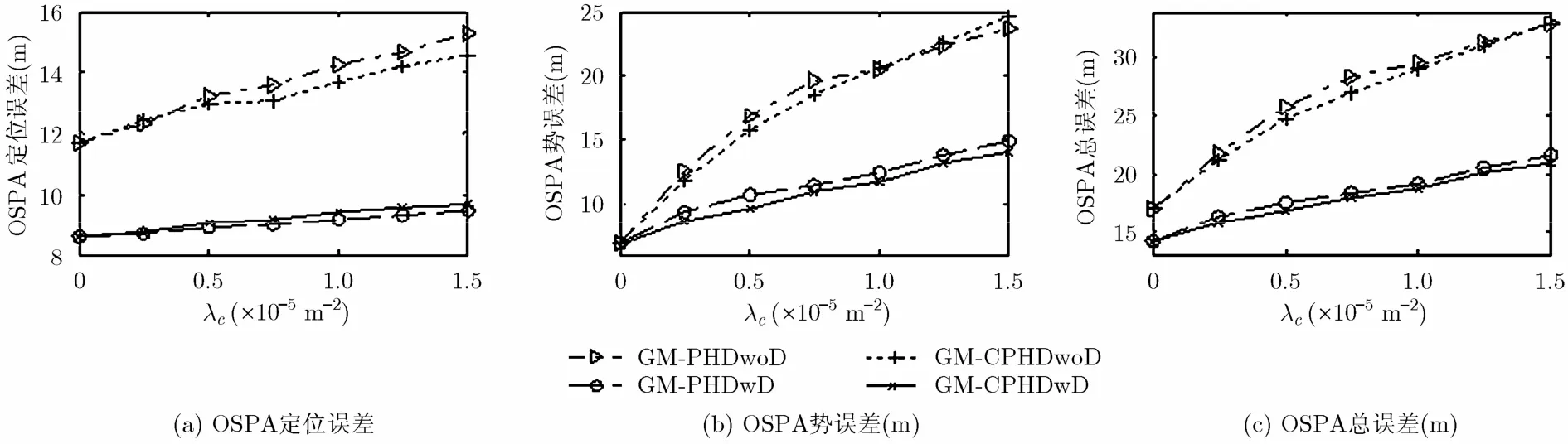
图 3 不同杂波密度下各算法跟踪性能比较
[1] Mahler R. Statistical Multisource-multitarget Information Fusion[M]. Norwood: Artech House, 2007.
[2] Reuter S, Wilking B, Wiest J, et al.. Real-time multi-object tracking using random finite sets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(4): 2666-2678.
[3] Zhou G, Pelletier M, Kirubarajan T, et al.. Statically fused converted position and Doppler measurement Kalman filters[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 300-318.
[4] Ulmke M, Erdinc O, and Willett P. GMTI tracking via the Gaussian mixture cardinalized probability hypothesis density filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4): 1821-1833.
[5] Yoon J H, Kim D Y, Bae S H, et al.. Joint initialization and tracking of multiple moving objects using Doppler information[J]. IEEE Transactions on Signal Processing, 2011, 59(7): 3447-3452.
[6] Vo B-N and Ma W K. The Gaussian mixture probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2006, 54(11): 4091-4104.
[7] Vo B T, Vo B N, and Antonio C. Analytic implementations of the cardinalized probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3553-3567.
[8] Ouyang C, Ji H, and Tian Y. Improved Gaussian mixture CPHD tracker for multitarget tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1177-1191.
[9] 欧阳成, 姬红兵, 张俊根. 一种改进的CPHD多目标跟踪算法[J]. 电子与信息学报, 2010, 32(9): 2112-2118. Ouyang C, Ji H, and Zhang J. Improved CPHD filter for multitarget tracking[J]. Journal of Electronics & Information Technology, 2010, 32(9): 2112-2118.
[10] Beard M, Vo B T, Vo B N, et al.. A partially uniform target birth model for Gaussian mixture PHD/CPHD filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(4): 2835-2844.
[11] Ristic B, Clark D, Vo B N, et al.. Adaptive target birth intensity for PHD and CPHD filters[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 1656-1668.
[12] Beard M, Vo B-T, and Vo B-N. Multitarget filtering with unknown clutter density using a bootstrap GMCPHD filter[J]. IEEE Signal Processing Letters, 2013, 20(4): 323-326.
[13] Ristic B, Clark D, and Gordon N. Calibration of multi-target tracking algorithms using non-cooperative targets[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 390-398.
[14] Battistelli G, Chisci L, Fantacci C, et al.. Consensus CPHD filter for distributed multitarget tracking[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 508-520.
[15] Uney M, Clark D, and Julier S. Distributed fusion of PHD filters via exponential mixture densities[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 521-531.
[16] Ristic B, Vo B-N, Clark D, et al.. A metric for performance evaluation of multi-target tracking algorithms[J]. IEEE Transactions on Signal Processing, 2011, 59(7): 3452-3457.
吴卫华: 男,1987年生,博士生,研究方向为多源信息融合.
江 晶: 男,1964年生,博士,教授,博士生导师,研究方向为现代信号处理、雷达数据处理、信息融合.
冯 讯: 男,1982年生,博士,研究方向为多传感器数据融合.
刘重阳: 女,1988年生,博士生,研究方向为多传感器组网.
Multi-target Tracking Algorithm Based on Gaussian Mixture Cardinalized Probability Hypothesis Density for Pulse Doppler Radar
Wu Wei-hua Jiang Jing Feng Xun Liu Chong-yang
(Air Force Early Warning Academy, Wuhan 430019, China)
In order to take full advantage of Doppler information for Multi-Target Tracking (MTT) in the clutter environment under the framework of emerging Random Finite Sets (RFS), an MTT algorithm based on Gaussian Mixture Cardinalized Probability Hypothesis Density (GM-CPHD) for pulse Doppler radar is proposed. Based on the standard GM-CPHD, the target states are updated sequentially using Doppler measurements after updating them using position measurements, then more accurate likelihood function and state estimation are obtained. Simulation results show the effectiveness of the proposed algorithm, and the introduced Doppler information can effectively suppress clutter and evidently improve tracking performance.
Multi-Target Tracking (MTT); Random Finite Sets (RFS); Probability Hypothesis Density (PHD); Gaussian Mixture Cardinalized Probability Hypothesis Density (GM-CPHD); Pulse Doppler radar
TN953
: A
:1009-5896(2015)06-1490-05
10.11999/JEIT141232
2014-09-23收到,2014-12-15改回
国家自然科学基金(61102168)资助课题
*通信作者:吴卫华 weihuawu1987@163.com
猜你喜欢
环球人物(2022年4期)2022-02-22
科学与信息化(2021年30期)2021-12-24
小资CHIC!ELEGANCE(2021年32期)2021-09-18
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
西北工业大学学报(2015年3期)2015-12-14
电影故事(2015年16期)2015-07-14
遥测遥控(2015年2期)2015-04-23
小学阅读指南·高年级版(2014年2期)2014-05-27
现代防御技术(2014年6期)2014-02-28
