
下肢助力外骨骼服传感靴的优化设计
2015-07-03 03:33赵浩莫新民纪平鑫周加永吕启元
单片机与嵌入式系统应用 2015年2期
赵浩,莫新民,纪平鑫,周加永,吕启元
(西北机电工程研究所,咸阳712099)
引 言
在下肢助力外骨骼服系统中,传感靴起到了十分重要的作用。当穿戴上外骨骼服后,传感靴与地面直接接触,并通过其内置的压力传感器检测压力值的变化。通过放大电路,将压力信号转换为电压信号,并反馈到控制系统中,这些信息对控制决策系统进行步态判断和穿戴者运动意图的分析有重要作用。因此,传感靴中压力传感器和放大电路的设计是非常重要的,直接影响到外骨骼服的性能和稳定性[1-3]。
1 压力传感器的选择
利用压力传感器进行传感靴足底压力测量时,需要对足底多部分的压力信息进行测量。在进行测量的过程中,为了保证选用的压力传感器能够较好地满足测量范围的要求,同时尽可能提高测量的精确度,压力传感器需要满足以下几个条件:
①压力传感器的安装位置不能对穿戴者的运动造成干扰。下肢助力外骨骼服传感靴的底板有一定厚度,如果选择的压力传感器高于传感靴的底板,就会给穿戴者造成不舒适感,影响穿戴者的正常行走。
②压力传感器的量程要合适。在正常人行走过程中,与足底压力相关的主要有两个参数:平均静态足底压力参数和平均动态压力参数。通过查阅相关的参考文献得知,我国正常成年人的平均静态足底压力的最大值为(1.28±0.33)kg/cm2,平均动态足底压力的最大值为(2.96±0.66)kg/cm2。由于下肢助力外骨骼服穿戴者的个体差异较大,为了保证有较高的容错性,压力传感器的量程必须能够达到这两个参数的最大值[4]。
③压力传感器要有较好的时滞性和重复性。由于人体正常步行过程是一个周期重复性的过程,为了保证在这个过程中对压力的重复测量,必须选择一款重复性和时滞性都较好的传感器。
通过对现有传感器进行调研,筛选了能够同时满足上述条件的传感器,进行了两种实验方案设计。方案一选用德国ME公司的KM26压力传感器,方案二选用Tekscan公司的FlexiForce系列电阻式薄膜压力传感器。
ME公司的KM26传感器是一种小尺寸的压力传感器,主要用于压缩力的测量,可以选择的量程范围是100 N~10 k N。在传感器的顶部有一个直径为40 mm的圆形凸起用来感知压力。安装时需要将传感器固定在一个平面上,并且将圆形凸起高出表面,防护等级为IP67。根据计算,在方案一中选用500 N量程的传感器。
Tekscan公司的FlexiForce系列传感器的厚度为0.2 mm,并且具有良好的卷曲性。提供了0~4.4 N、0~111 N、0~445 N三个量程范围进行选择,可以根据测量范围的大小选择不同量程的传感器。在方案二中,采用的传感器型号为A201,量程范围是0~445 N。
KM26和A201两种传感器的性能参数和特性对比如表1所列。
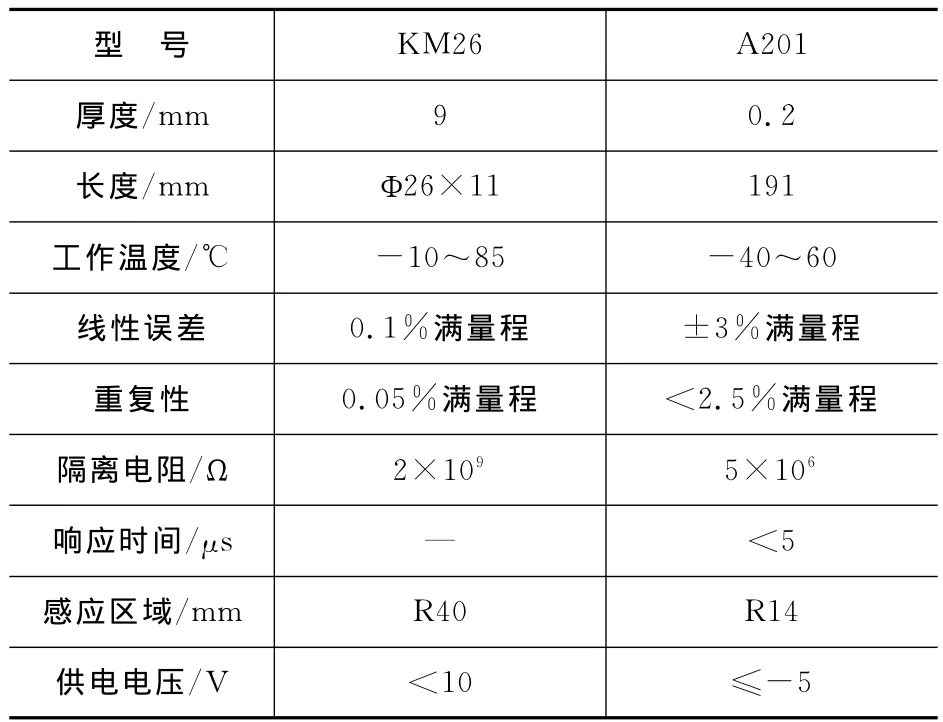
表1 KM26和A201传感器特性对比
可以看出,KM26传感器在性能上要优于A201。但KM26的安装较为复杂,需要将鞋底进行处理;A201为薄膜传感器,有很大的韧性,可以直接粘贴在鞋垫上。A201在售价上很有优势,仅为KM26的1/10,且A201的接线方式较为简单。综合本设计的实际使用需求,A201的精度已经可以满足,因此将A201作为本设计优先选择的传感器。
2 压力传感器的布局
人的足底大致可分为以下15个区域:足跟区(区域1~3)、足弓区(区域4~5)、跖骨区(区域6~10)、趾骨区(区域11~15),如图1所示[5]。
查阅相关资料研究发现,正常人在行走过程中足底各部分压力从小到大依次为:足弓区(区域4~5)、趾骨区1(区域11~14)、趾骨区2(区域15)、跖骨区1(区域6~9)、跖骨区2(区域10)、足跟区(区域1~3),并且在足弓区的压力信号非常微弱,可以不进行采集。
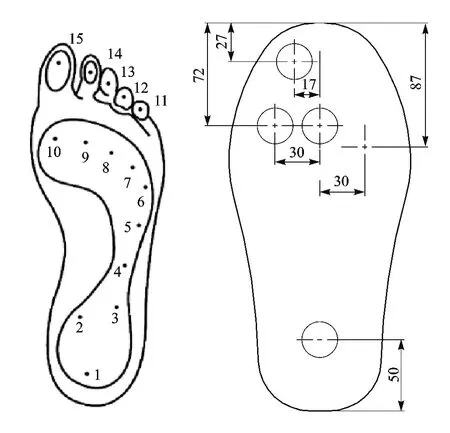
图1 足底分布图及传感器安装位置图
综上所述,在传感器的安装位置方面,如果整个足底布满传感器将使脚底压力变得极为复杂,而且在足弓区没办法检测到压力值的变化,导致控制系统的算法分析、计算都会产生很多困难。为了能够降低成本、精简控制算法,在方案一和方案二两种传感器的分布情况下,分别在足底安装了5个压力传感器,分别是足跟区1个、跖骨区3个、趾骨区1个,如图1所示。这样的布局既能够保证所采集的压力信号可以真实反映实际的步态,又简化了下肢助力外骨骼的电气硬件配置和控制算法,对于整个系统的正常运行起到了十分重要的作用。
3 信号转换放大电路的设计
在方案一中使用的是KM26压力传感器,生产厂家配有相应的信号转换放大电路板,可以随传感器一同购买。供电电压为12 V或24 V,接线较为简单,但电路板的售价较为昂贵,成本较高。
在方案二中所使用的是A201薄膜压力传感器,其没有配套的信号转换放大电路板,需要自行设计。由于控制系统要采集的是0~10 V的电压信号,因此需要将薄膜压力传感器的压力信号转换为电压信号。
A201薄膜压力传感器的技术资料中提供了相关的参考电路,所选用的运算放大器是Microchip公司的MCP6001/2/4系列运算放大器。这一系列器件具有1 MHz增益带宽积和90°相位容限(典型值),供电电压为1.8~5.5 V,提供单运放、双运放和四运放封装。在本设计中,足底共安装了5只薄膜压力传感器,因此需要同时采集5路的压力信号并转换为电压信号。为了减小印制板的尺寸和减少芯片的使用数量,选用3个双运放输出的SOIC封装的MCP6002芯片作为运算放大器[6]。
参考电路中的输出电压计算公式为:Vout=-VT×(RF/RS)。其中,RS为薄膜压力传感器的电阻,RF为反馈电阻(最小为1 kΩ),VT为工作电压,Vout为输出电压。在测量过程中,为了能够得到更大的输出量程,需要降低工作电压并且减小反馈电阻的阻值。经过计算,为了使得实验测得的输出电压能够满足实际的使用要求,在本设计中选用-5 V为工作电压,反馈电阻为100 kΩ。放大电路的原理图如图2所示。
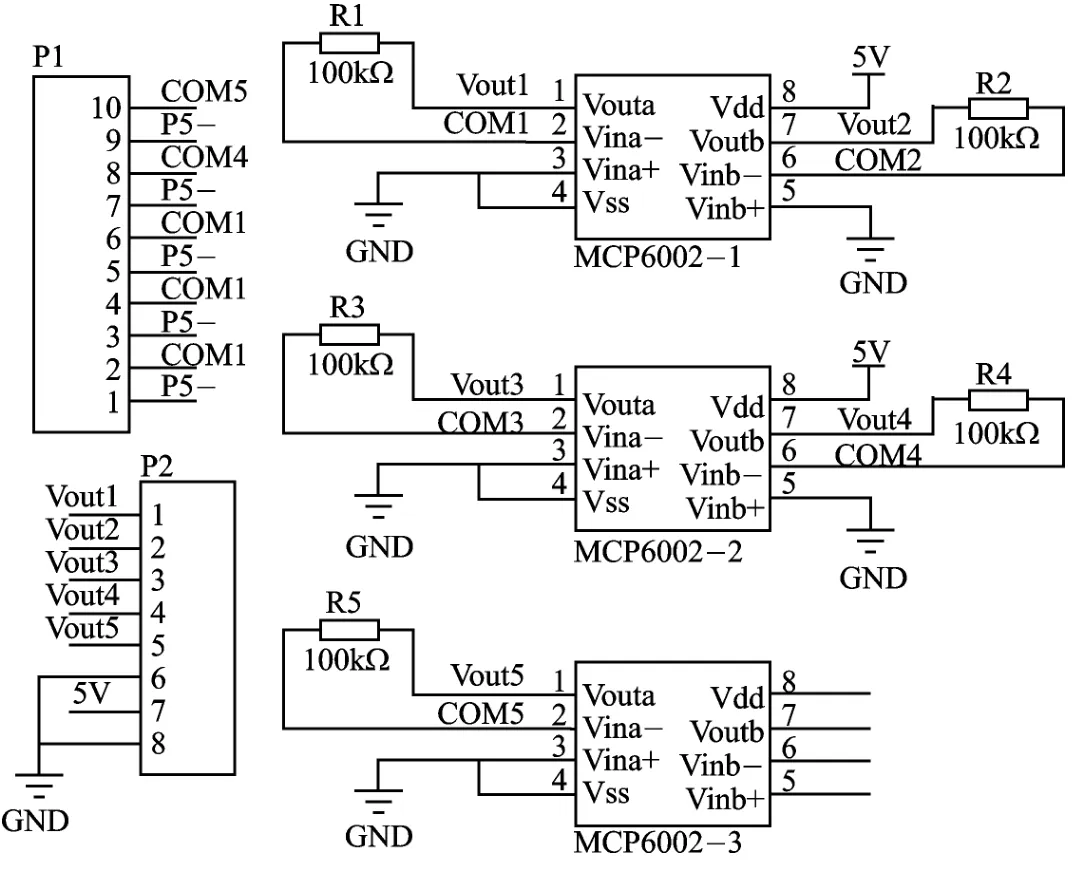
图2 信号转换放大电路原理图
4 数据采集及通信接口设计
本设计采用PIC18F2580单片机模/数转换模块对信号进行A/D转换,等待定时中断到来后,将数据发送到CAN总线上。具体软件流程图如图3所示。在下肢助力外骨骼服控制系统中要求的感知信号传输周期为10 ms,在进行软件的设计过程中,对5个压力传感器信号采用轮询方式不间断采样,并将这些信号放入CAN总线的数据缓冲区,另外,设置10 ms的时钟timer,当时钟中断到来时,将单片机缓冲区中的数据发送到CAN总线上。
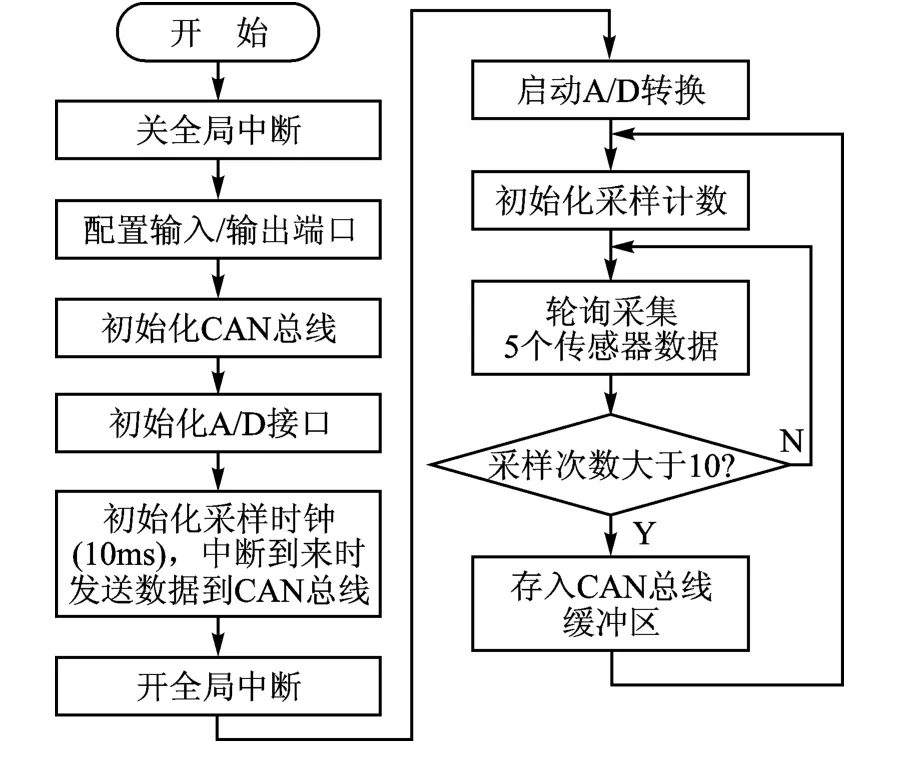
图3 数据采集软件流程图
5 实验结果及分析
实验选取一名男性被测者,体重70公斤,右脚穿传感靴,分别进行平地行走和上下阶梯实验。平底行走的步幅为40 cm,并划定步幅指引线,保证所采集数据的一致性。阶梯的高度为17 cm,宽度为40 cm,实验中采取上3级台阶之后下2级台阶为一个采样周期。测试者分别穿戴方案一和方案二两种传感器设计方案的传感靴进行平地行走和上下阶梯实验。在控制系统中,采用了VC++软件所编写的程序进行信号的采集和显示,数据采样周期为10 ms。实验结果如图4和图5所示,分别为采用方案一和方案二所选择的传感器进行平地行走和上下阶梯实验的采样曲线[7]。
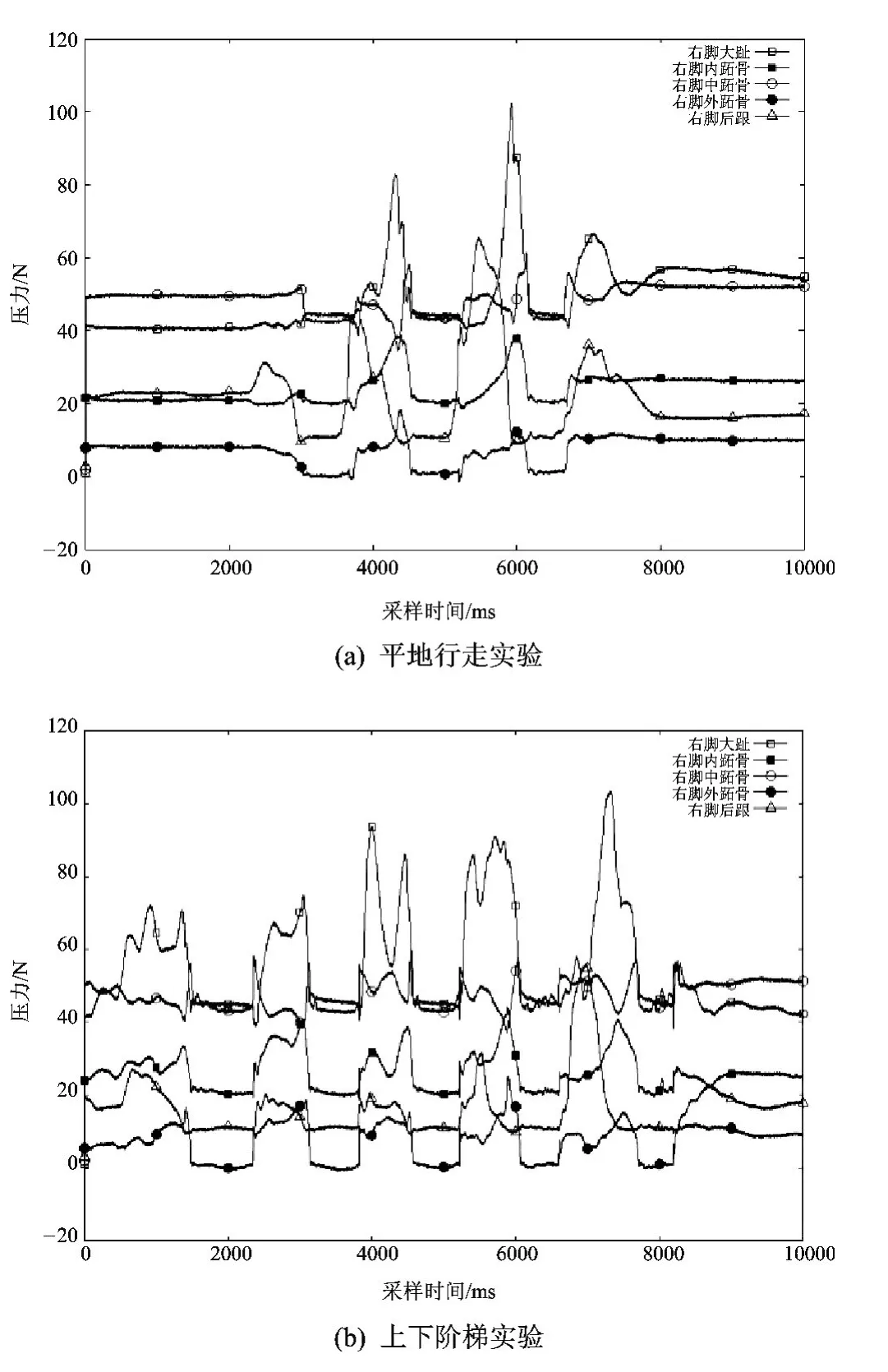
图4 方案一进行平地行走和上下阶梯实验采样曲线图
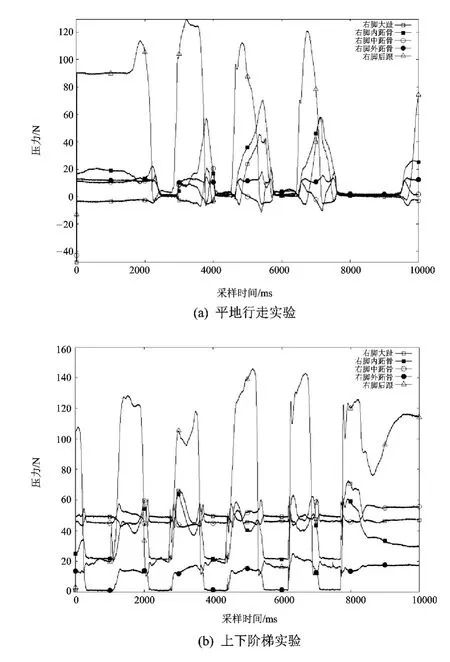
图5 方案二进行平地行走和上下阶梯实验采样曲线图
结 语
足底安装的5只传感器的采样曲线分别用5种曲线样式进行表示。在进行平地行走实验时,测试者共走了3步,从图4(a)和图5(a)中可以看出有3个曲线尖峰。在进行上下楼梯实验时,测试者的前3步为上楼梯,后两步为下楼梯,从图4(b)和图5(b)中可以看出有5个曲线尖峰。
还可以看出,在一个步态周期中脚后跟处传感器的压力值最大,趾骨区次之,跖骨处的压力值最小,基本能够区分人正常行走时的落地、支撑和离地三个阶段。
同一名测试者分别穿戴方案一和方案二所安装传感器的传感靴进行实验,能够基本反映出人在行走时的步态情况,控制系统能够以此为依据进行算法的分析和设计。
从图4和图5中可以明显看出,方案二的采样曲线要明显好于方案一。方案一中平地行走脚后跟曲线最大峰值为100,方案二中则为120;方案一中上下阶梯实验脚后跟曲线最大峰值为100,方案二为160。
方案二中的曲线更平滑,每一个步态周期都能够明显区别出来,稳定性和重复性更好,对于控制系统对下肢助力外骨骼服的运动趋势判断有很大的优势。因此,选择FlexiForce A201传感器的方案二在工作中的性能表现更好,更适合在下肢助力外骨骼服传感靴中进行应用。
本文介绍了下肢助力外骨骼服传感靴的设计,分别选取了采用不同传感器的两种方案进行对比实验。详细介绍了传感靴中传感器的选择、安装位置、信号放大转换电路的设计、数据采集及通信接口电路的设计,并选取了一名测试者进行了平地行走和上下阶梯实验。
实验结果表明,选取FlexiForce A201传感器的方案二在实验中的性能参数可以更好地反映出下肢助力外骨骼服的步态,为控制系统对于外骨骼的驱动算法和运动趋势研究提供了可靠的基础。
[1]Justin W Raade,H Kazerooni.Analysis and Design of a Novel Hydraulic Power Source for Mobile Robot[J].IEEE Transactions on Automation Science and Engineering,2005,2(3),226-232.
[2]Alberto Esquenazi,Mukul Talaty,Andrew Packel,et al.The ReWalk Powered Exoskeleton to Restore Ambulatory Function to Individuals with Thoracic-Level Motor-Complete Spinal Cord Injury[J].American Journal of Physical Medicine&Rehabilitation,2012(91):911-921.
[3]孙建,余永,葛运建,等.可穿戴型下肢助力机器人感知系统研究[J].微纳电子技术,2007(8):7-8.
[4]韦启航,陆文莲,傅祖芸,等.人体步态分析系统:足底压力测量系统的研制[J].中国生物医学工程学报,2000,19(1):31-42.
[5]张木勋,袁刚,张建华.正常人足低压力分布及其影响因素分析[J].中华物理医学与健康,2006,26(3):156-160.
[6]孟丽霞,于林丽,濮钰麒.微小信号放大电路设计[J].仪器仪表学报,2006,7(27):1012-1013.
[7]孙兆君.可穿戴助力机器人传感器信号预测算法和控制器的设计[D].合肥:中国科学技术大学,2009:1-2.
猜你喜欢
传感技术学报(2022年7期)2022-10-19
现代仪器与医疗(2022年4期)2022-10-08
今日农业(2022年15期)2022-09-20
军民两用技术与产品(2021年7期)2021-10-13
煤气与热力(2021年4期)2021-06-09
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
电子制作(2018年23期)2018-12-26
石油化工自动化(2018年5期)2018-11-14
工业设计(2016年6期)2016-04-17
