高压巡检机器人机械的设计探究
2015-06-29 12:10:58林海李铁明
科技资讯 2015年11期
林海 李铁明
摘 要:为了保证高压输电线路的稳定运行,定期需要对高压输电线路进行巡检,高压输电线路巡检机器人的应用,有效提高了输电线路的巡检效率,避免了人工巡检所具有的危险性,降低了人力和物力方面的投入。巡检机器人的实用性能与其机械本体结构有直接的关系,合理化的机械结构设计是影响机器人应用和发展的主要技术之一。该文对高压输电线路巡检机器人的设计进行研究和探讨。
关键词:高压 输电线路 巡检 机器人
中图分类号:TP242 文献标识码:A 文章编号:1672-3791(2015)04(b)-0039-01
随着我国电网规模的不断扩大,高压输电线路在我国电路传输中占有十分关键的地位,为电力输送发挥着重要的作用。高压输电线路能够安全、稳定的运行与社会发展和人民的日常生活息息相关。为了保证高压输电线路能够稳定可靠的运行,需要对输电线路定期进行巡检和维护。传统的输电线路的巡检以人工检测的方法为主,不仅巡检效率低,而且具有一定的危险性,特别是在恶劣的环境下,采用人工巡检的方式对高压输电线路进行维护和保养,需要投入大量人力、物力和财力,加上线路的日益复杂,人工巡检操作困难,危险性高。巡检机器人的应用有效的取代了人工巡检存在的弊端,自应用以来受到行业专家和学者的广泛关注。在复杂的高压线路环境下,巡检机器人要高效的完成巡检任务,需要有在线行走和跨越障碍的能力,因此,机器人本身的机械结构就直接影响着机器人的实用性能,也是巡检机器人应用和发展的重要技术之一。
1 巡检机器人机械结构的组成和功能
在高压输电线路上存在多种障碍物,如防振锤、跳线、线夹等,机器人要在高压线路上以高空悬挂的方式完成巡检任务,就需要其机械本体具有行走和越障的机构,以使巡检机器人能够在高压输电线路上实现行踪和在线越障,保证其能够在输电线路上持续工作。
高压输电线路上的巡检机器人的行走机构,是机器人的基本组成结构,是巡检机器人性能实现的基础。线路巡检机器人与地面机器人在行走方式上市截然不同的,不仅要在线路上行走,同时还需要在线路上保持平衡稳定的状态。从仿生学的角度来看,巡检机器人在输电线路上的行走与人类在钢丝上行走极为相似。人类在钢丝绳上行走一般利用双臂将身体在钢索上悬挂,采用双手交替抓握钢索的方式在钢丝绳上行走。或者是采用平衡杆来保持身体的平衡性,采用平地行走的方式行走。两种方式相较而言,前者稳定性更高,行走速度更快。根据放生机械设计的原理,机器人在线行走功能设计原理可模仿人体悬挂在钢索上行走的模式,采用滑轮在线滑动的方法来实现。
2 巡检机器人的机械结构设计
2.1 巡检机器人基本结构组成
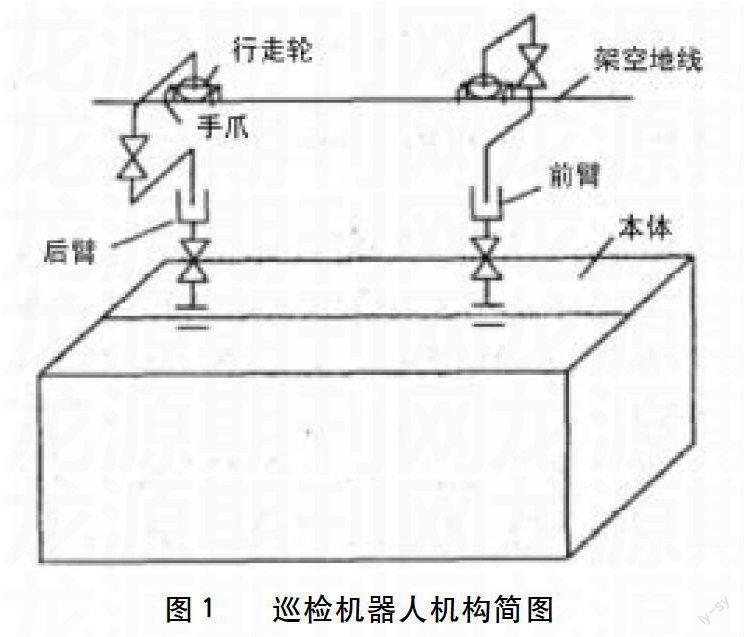
如图1所示,高压巡检机器人的机械结构主要分为机器人双臂和机器人箱体两个部分。箱体中装置由控制器、无限收发器、电机驱动器等电子设备。双臂是巡检机器人用来越障的主要机构,电机位于手臂的前端用来驱动和控制机器人的行走,在电机两侧装置有手爪,能够为机器人行走和越障提供保护。巡检机器人的双臂是对称的,每个手臂具有四个自由度串联机构,上臂装置由转动副和上下伸缩移动副,下臂有转动副和水平方向移动副。机器人手臂具有大范围回转的功能,手臂可以机器人本体进行移动,双臂的八个自由度为机器人的行走和越障能力的实现提供保障。
2.2 巡检机器人的硬件结构
巡检机器人的控制系统包括本体和地面基站。机器人具有各自独立的图像传输系统和数据指令传输系统,在不同的信道内各种承担工作任务。机器人的状态通过无线通信的方式进行远程控制和监督。机器人本体与地面基站之间建立有专门的无线图像传输系统,机器人在巡检任务的执行过程中将线路状况拍摄成图像信息通过无线通信系统传送到地面基站。
2.3 控制系统
高压输电线路路巡检机器人在执行线路巡检任务的过程中,沿着输电线路架空行走,因为输电线路离地面较高,因此巡检机器人的控制不仅仅包括线路上行走,同时还包括上线、跨越障碍、线路检测、下线等一系列的任务执行过程。控制系统必须对机器人进行全程的动态监测和控制,保证机器人每一个动作的安全。为了实现对上述任务的有效控制,本文设计的高压巡检机器人包括辅助控制系统、行走过程控制系统、越障过程控制系统、异常情况处理四个部分。
3 高压巡检机器人机械设计的发展前景
高压巡检机器人自应用以来,受到全球电力行业的广泛关注,成为电力领域研究的热点问题。随着新技术的不断开发和更新,巡检机器人也必将朝着轻量化、简单化、高效化的发展方向,应用前景十分广阔。
3.1 轻量化发展
机器人的性能取决于其本身的机械结构、材料、系统模块配置等因素。从我国现今高压巡检机器人的应用来看,主要依靠蓄电池进行能源供应,现今很多学者致力于利用感应原理对机器人在高压线路工作状态下的取电,以实现工作中的自我供电取代传统的蓄电池供电,这种方式的应用能够有效的减轻机器人的重量。同时材料科学的不断发展进步,是机器人在材料方面更加先进,是巡检机器人的轻量化设计成为可能。
3.2 简单化发展
随着控制技术的不断发展,机器人的控制复杂性会不断降低,不仅操作更为简单,而且工作效率同时得到有效的提高。随着对机器人机构设计的不断优化,结构更加简单,机器人的越障能力更加灵活,协调性更好。
3.3 高稳定性、高效性发展
衡量巡检机器人的性能是以机器人运行的稳定性和高效性为标准的,巡检机器人大多应用在户外比较恶劣的环境条件下,而且其是在悬挂的状态下执行巡检任务,为了保证其工作质量,必须首先保证其具有较高的稳定性和高效性,这一直是研究人员关于巡检机器人研发的重点问题,也是高压巡检机器人的发展趋势。
参考文献
[1] 孙翠莲,王洪光,赵明扬.超高压线巡检机器人移动越障机构综述[J].机械设计与制造,2013(10).
[2] 丁鸿昌,王吉岱,杨前明.高压输电线路自动巡检机器人的研制与开发[J].现代制造技术与装,2012(4).
猜你喜欢
军民两用技术与产品(2022年6期)2022-08-06 07:31:44
科学与财富(2016年21期)2017-03-02 18:53:29
中国新通信(2016年23期)2017-03-01 11:52:48
中国高新技术企业(2016年34期)2017-02-10 23:09:05
中国科技博览(2016年19期)2016-10-19 13:11:05
科学与财富(2016年28期)2016-10-14 20:23:24
科学与财富(2016年28期)2016-10-14 03:48:23
科学与财富(2016年28期)2016-10-14 00:42:58
科技资讯(2015年5期)2016-01-14 17:50:41
河南科技(2014年24期)2014-02-27 14:19:40