
高速铁路列控车载系统超速防护算法的研究与仿真
2015-06-28 15:53:42易承龙
铁路计算机应用 2015年8期
易承龙
(中铁第四勘察设计院集团有限公司,武汉 430063)
高速铁路列控车载系统超速防护算法的研究与仿真
易承龙
(中铁第四勘察设计院集团有限公司,武汉 430063)
列控车载系统是一个典型的安全苛求系统,车载系统超速防护算法对列控系统的安全性具有重要影响。本文结合高速列车动力学模型、延时特性和混杂特征,提出了车载超速防护算法及车载系统的混杂建模方法。利用Simulink/Stateflow混合仿真技术实现了车载超速防护算法的仿真,并以区间两车追踪场景为例对超速防护算法进行验证。验证结果表明该超速防护算法是有效的,区间运行的两辆高速列车能够实现避撞功能。
车载系统;超速防护;Simulink/Stateflow;两车追踪;仿真
随着高速铁路的快速发展,列车控制(以下简称:列控)系统的安全性成为了人们关注的焦点[1]。车载系统是列控系统的核心单元,根据无线闭塞中心发送的行车许可(MA),结合线路数据、列车的制动性能等生成目标距离曲线,负责对列车运行速度实施超速防护(ATP),保持列车之间的安全距离,从而确保列车的安全运行。列车超速防护算法的正确与否直接影响到行车安全与运行效率。
CTCS-3级列控车载系统是一个典型的混杂系统[2~3],系统中有很多离散变量,如加速度、制动等级、列车运行的模式等,同时也包含很多连续变量,如列车的速度、距离、运行时间等。针对列控车载系统的混杂特性,将Simulink/Stateflow仿真方法引入车载系统中。给出车载系统总体结构模型和各模块功能。结合高速列车的动力学模型、延时特性和混杂特性,提出车载超速防护算法及车载系统的混杂建模方法。选定区间两车追踪场景,用Simulink对车载系统的连续部分进行建模,Stateflow对车载系统的离散部分进行建模。对建立的模型进行仿真分析,结果表明区间运行的前后两列车能够实现避撞功能,表明该车载系统超速防护算法的正确性。
1 CTCS-3级列控车载系统
1.1 系统结构
CTCS-3级列控车载系统是列控系统的核心设备,根据地面系统的信息生成速度模式曲线,监控列车安全运行,主要包括车载安全计算机(VC)、应答器信息传输模块(BTM)、轨道电路信息接收(TCR)、测速测距(SDU)、人机界面(DMI)、GSM-R无线通信(RTU)、列车接口(TIU)等单元,其总体结构如图1所示。

图1 CTCS-3级列控车载系统总体结构图
1.2 模块功能[4]
(1)车载安全计算机:车载系统的核心模块,实时向无线闭塞中心(RBC)发送位置报告并接收RBC发送的行车许可、紧急停车、临时限速等信息,结合自身的数据信息计算最限速度曲线(MRSP)、实时计算目标距离模式曲线并与列车当前的速度距离信息比较,从而决策列车正常运行、常用制动、紧急制动。
(2)应答器信息传输模块:接收地面应答器信息并通过串行接口传给安全计算机。
(3)轨道电路信息接收单元:接收轨道电路信息并通过串行接口传给安全计算机。
(4)测速测距单元:根据速度传感器和多普勒雷达测量列车的速度,并根据速度信息实时计算列车的走行距离。
(5)人机界面:实时显示列车的速度、公里标、等级、运行模式等信息,并允许司机输入司机ID、报警确认等。
(6)GSM-R无线通信单元:与GSM-R无线网络连接实现与RBC之间的双向连续通信。
(7)列车接口:将车载安全计算机产生的制动命令发送给列车操纵控制器。
2 车载系统超速防护算法
车载系统的核心功能是生成目标距离模式曲线,CTCS-3级列控车载系统共生成5条模式曲线,分别为紧急制动曲线(EB)、紧急制动触发曲线(EBI)、常用制动触发曲线(SBI)、报警曲线(W)、允许速度曲线(P)。目标距离模式下的速度监控曲线的关系如图2所示。

图2 目标距离模式下的速度监控曲线
2.1 曲线含义[5]
(1)EB曲线:列车运行发生危险的临界速度,它是列车在最不利条件下触发紧急制动后列车速度的运动轨迹。
(2)EBI曲线:如果列车速度超过了该曲线,将实施紧急制动,紧急制动触发后,只有在列车停车且司机按压缓解按键后,紧急制动才能缓解,是列车最高级别的制动也是防护列车安全的最后一道防线。
(3)SBI曲线:列车速度超过该曲线触发常用制动,常用制动触发后当列车速度低于缓解允许速度时可缓解常用制动,它是列车的主用制动方式。
(4)W曲线:列车速度超过该曲线触发报警,提醒司机采取措施以避免设备制动。
(5)P曲线:要求司机遵循的速度曲线,是行车的参考速度。
2.2 曲线计算原理[6~7]
2.2.1 EB曲线
EB曲线不向司机显示,但它是计算其它曲线的基础,它的计算分为顶棚速度监控区(CSM)和目标速度监控区(TSM), 其示意图如图3所示,其中CSM是指速度为常数的区段,它由最限制速度曲线来定义,即在数值上CSM=MRSP,TSM根据EOA点反推计算,其计算公式如下:

其中a为紧急制动加速度, s为列车车头到EOA的距离,计算出来的速度和MRSP取最小值,即为最终的EB动态监控速度。

图3 EB 曲线计算示意图
2.2.2 EBI曲线
EBI曲线的计算以EB曲线为基础,在实施紧急制动的过程中有3个阶段:(1)车载系统响应和切除牵引延时阶段。当列车速度到达EBI曲线时,车载系统要实施紧急制动,必须先切除列车的牵引再施加制动,这个过程会出现延时,考虑到最不利情况,列车在这个阶段采用最大牵引加速度运行。(2)紧急制动建立过程。列车紧急制动是加速从零开始增到紧急制动率的过程,需要一定的时间,考虑到最不利条件,在计算的过程认定此阶段的加速度为零。(3)紧急制动实施阶段。在这个阶段列车以紧急制动率制动直到停车。列车实施紧急制动的过程如图4所示,可分为CSM和TSM两段,在CSM区EBI曲线必须满足公式(2),其中a为列车的最大牵引加速度, t为车载系统响应和切除牵引时间。

EBI的TSM监控速度计算公式如下:
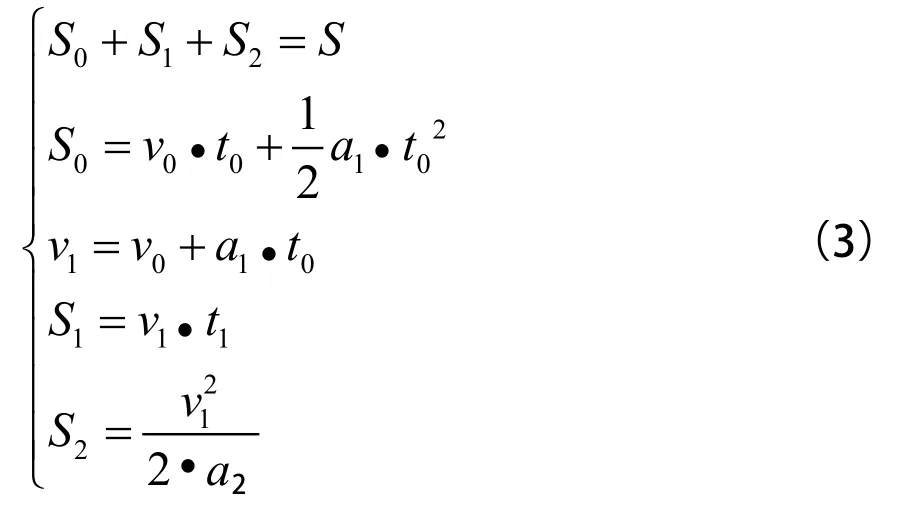
整理可得:


其中v0表示实施紧急制动时列车的速度,a1表示列车的最大牵引加速度,t0表示紧急制动车载系统响应和切除牵引时间,v1表示紧急制动建立阶段的初始速度,t1表示紧急制动过程建立的响应时间,a2表示紧急制动的加速度,S表示列车车头到EOA点的距离。上面的二元一次方程只有v0未知,由此可以求解出TSM阶段的初始速度v0,再和计算出的CSM速度做比较,较小的值就是最终的EBI动态监控速度。

图4 EBI曲线速度生成原理
2.2.3 SBI曲线
SBI曲线的计算以EBI曲线为基础,其计算过程和EBI曲线类似。W曲线、P曲线都是以SBI曲线为基础。W曲线列车经过twarn碰撞到SBI曲线,P曲线列车经过triver碰撞到SBI曲线,其计算公式如下:

当列车运行的速度碰撞到报警曲线,车载系统将产生报警提醒司机采取制动措施;若司机没有采取制动,列车运行的速度碰撞到常用制动曲线,列车将产生常用制动;若常用制动失效列车运行的速度碰撞到紧急制动曲线,列车将产生紧急制动,整个过程的状态转换图如图5所示。
3 区间两车追踪Simulink/Stateflow模型
3.1 Simulink/Stateflow仿真环境介绍
Stateflow以有限状态机为理论基础,一般直接嵌入在Simulink中,在仿真的初始化阶段,Simulink会把Stateflow绘制的逻辑图形通过编译程序转化为C语言,使两者有机的结合在一起。Stateflow采用面向对象的编程思想,即属性、事件和方法,可以很好地描述离散系统。一个Stateflow图由图形对象和非图形对象组成。图形对象包括状态、转移、真值表等,非图形对象包括数据、事件等。Stateflow中的方框代表状态,根据需要每个状态可以有entry,during ,exit和on event_name共4种动作,分别表示进入该状态时,处于该状态期间,离开状态和期间发生某件事时所进行的活动。
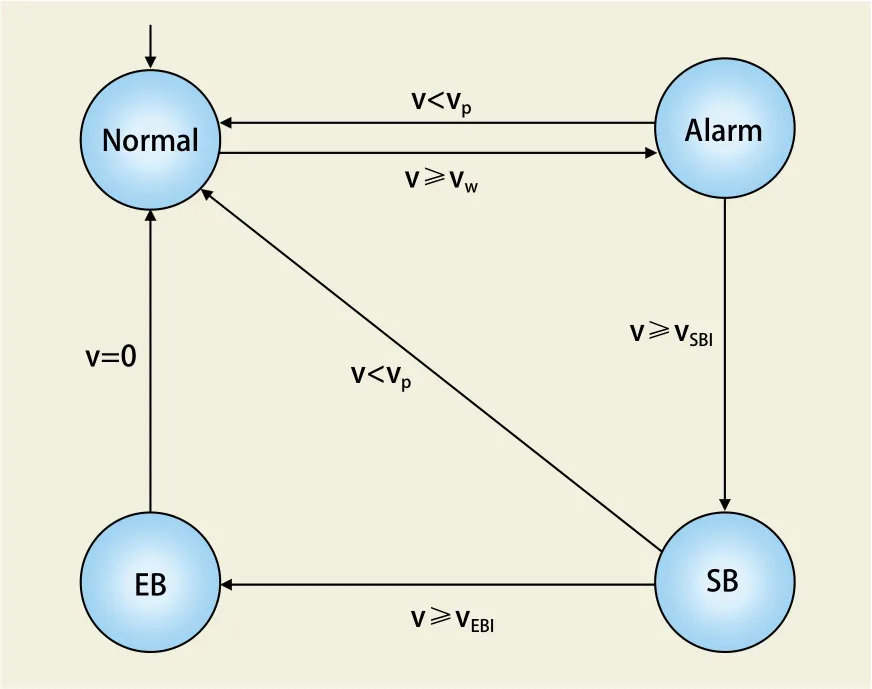
图5 车载控车状态转换图
3.2 场景介绍
行车许可是列控系统14个主要运营场景中的一个。整个行车许可场景分为接发车进路、通过进路和区间闭塞分区3种模式。本文以区间闭塞分区两车追踪为例运用Simulink/Stateflow对列控系统进行建模。无线闭塞中心作为CTCS-3级列控地面系统的核心设备,根据从联锁获取的进路信息和联锁转发列控中心(TCC)的轨道占用信息,临时限速服务器获取的限速信息,车载系统获取的列车位置信息,综合自身数据库里面的线路信息等生成行车许可,并将MA发送给车载系统。车载系统根据MA以及从测速测距单元获取的速度、距离信息结合数据生成制动模式曲线,监督列车的运行。其信息传递如图6所示。
3.3 模型假设
3.3.1 线路
整个区间只有两辆列车,没有道岔,区间等长且长度为2 km,不考虑线路的坡度、弯度等情况对列车运行的影响。
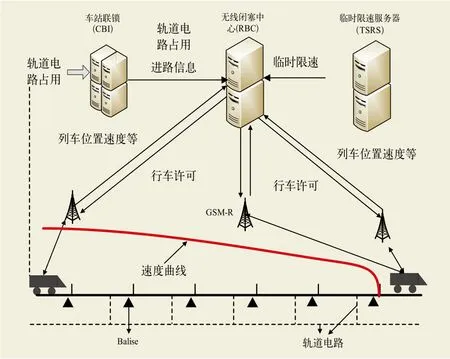
图6 区间两车追踪示意图
3.3.2 牵引模型
机车牵引力与列车运行方向相同并可由司机根据需要调节外力。在本模型中主要考虑的是列车制动,所以对牵引考虑的比较粗略,假定列车的最大牵引加速度为0.6 m/s2。
3.3.3 制动模型
不考虑空气阻力、轨道粘着力,且两辆车的车型相同,设定车长为400 m,列车紧急制动的平均加速度为-1.1 m/s2,最大常用制动为-0.8 m/s2。
3.3.4 MA更新
假定前车的MA不再更新,运行完自身的MA后停车,只有后车更新MA。
3.3.5 反应时间
列车常用制动的空走时间为2.3 s,紧急制动的空走时间为1.5 s,切除牵引后ATP的响应时间和制动触发后切除牵引的时间和为1.2 s。
3.4 车载系统超速防护算法模型
车载系统超速防护算法主要用于生成制动模式曲线,包含一些连续变量,可以用Simulink的常规模块配合Embedded MATLAB建立,编写M语言完成一些Simulink常规模块不容易完成的功能,完整的超速防护算法模型如图7所示,模块都是分层的由于5条曲线的建模思路比较类似,这里只对EBI曲线的模型进行介绍。双击EBISpd模块可以看到建立好的EBI曲线模型如图8所示。
在图8中,min是一个取最小值逻辑模块,完成顶棚速度监控和目标速度监控的最小值运算;CSMEBI模块代表EBI曲线的顶棚监控速度,它是一个Embedded MATLAB模块,完成公式(2)的计算。EBI_a、EBI_b、EBI_c分别代表公式(4)的二次项系数、一次项系数和常数项系数,模块TSMEBI完成其运算。

图7 完整的超速防护算法模型
3.5 两车追踪场景在Simulink/Stateflow环境下的模型

图8 EBI速度曲线模型
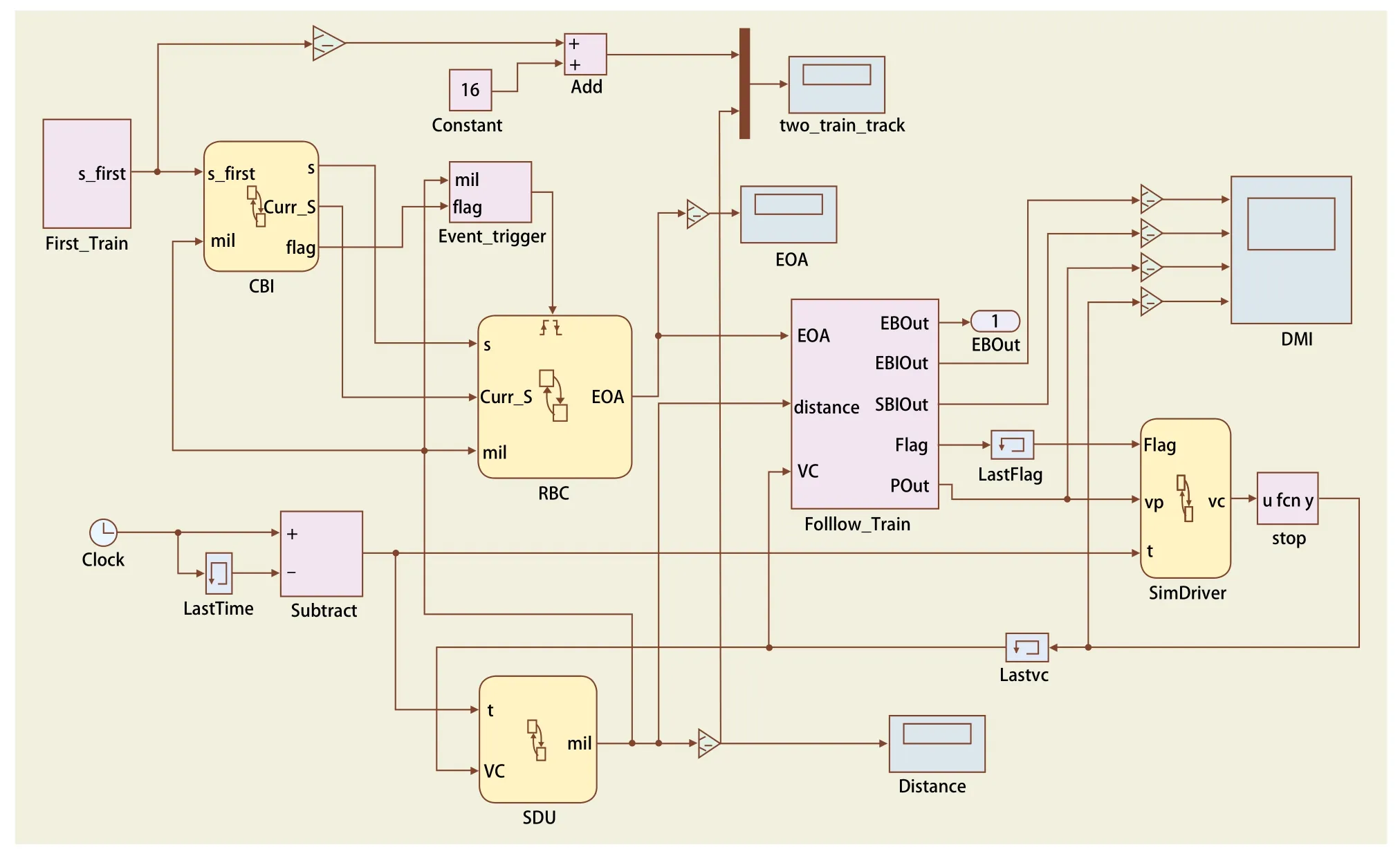
图9 两车追踪场景的Simulink模型
模型的连续部分主要是车载系统生成制动模式曲线的部分,用Simulink的常规模块配合Embedded MATLAB建立,模型的离散部分用Stateflow进行建模,建立的完整Simulink模型如图9所示。其中First_Train模块、CBI模块、RBC模块主要是给后车生成行车许可;SDU模块为列车提供测速测距;EOA模块显示RBC为后车提供的行车许可终点;DMI模块显示列车运行的4条速度距离曲线;Follow_Train模块主要负责生成模式曲线并负责在几种控车模式中的转换;SimDriver模块为仿司机驾驶模块,执行车载系统的控车指令,其Stateflow模型如图10所示。

图10 仿司机驾驶的Stateflow模型
3.6 两车追踪场景在Simulink/Stateflow环境下的仿真
Simulink模型若出现闭环回路,仿真时会出现错误,其有效的解决方法之一就是在反馈回路中加入延时单元。由于在仿真过程中Stateflow模块的仿真时间步长和Simulink模块的时间步长不一致,为了实现时间的同步,必须对离散部分附加一个输入用以启动离散模块,为此在离散部分引入一个脉冲发生器,并适当设置脉冲发生器的周期。车载系统的工作周期是200 ms,所以设置仿真求解器为定步长求解,仿真步长设定为200 ms。针对前后车不同的初始位置和初始速度进行多次仿真,结果表明前后两车都是避撞的,能满足列控系统的安全需求。
这里假定仿真开始时前后两车的间隔为16 km,以后车的车头为坐标原点,前车以200 km/h的速度运行,行车许可终点为24 km。后车的初速度为250 km/h,列车在区间正向运行,最高运行速度310 km/h,按照RBC发送的MA生成制动模式曲线监督列车运行。后车的DMI模块输出结果如图11所示,两车追踪的距离曲线如图12所示。
由图11可以看出后车实际运行的速度一直围绕允许速度波动,且一直没有超过EBI曲线,即列车在运行的过程中没有出现紧急制动。由图12可以看出前车运行一段时间后停在了22 km~24 km的闭塞分区中,后车的行车许可终点随着前车的运动不断变化,最终后车停在了22 km处,也就是前车停车位置的前一个闭塞分区入口,两车在追踪运行的过程中列车超速防护系统始终保证了列车的安全运行。

图11 后车模拟DMI输出
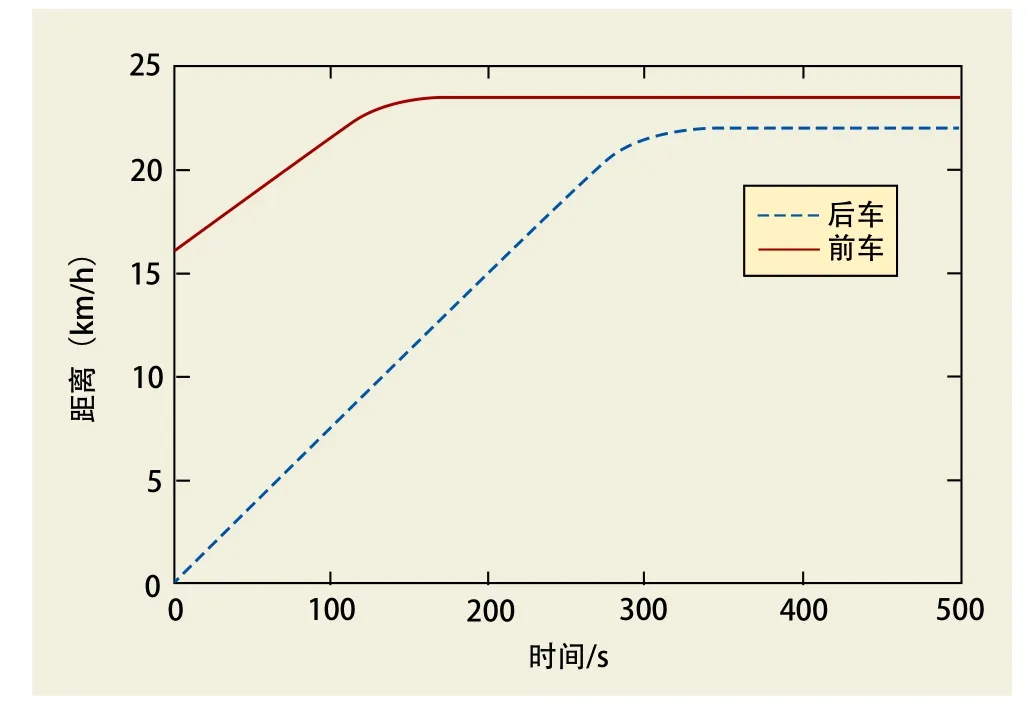
图12 前后车的追踪曲线图
4 结束语
本文介绍了CTCS-3级列控车载系统的结构和各模块功能,结合高速列车的动力学模型、延时特性和混杂特性,提出了车载超速防护算法及车载系统的混杂建模方法。针对列控系统的混杂特性选定区间两车追踪场景为例,应用Simulink/Stateflow对列车的超速防护算法行建模仿真,在仿真过程中系统连续部分可以用Simulink进行描述,离散部分采用Stateflow进行描述,仿真结果表明区间运行的前后两车是避撞的,有效地验证了列车超速防护算法的正确性。
[1]唐 涛.高速铁路列车运行控制系统车载设备安全性设计[J].北方交通大学学报,1999,23(5):83-87.
[2]Golli A,Varaiya P.Hybrid dynamical systems[C]. In:Proc.of the 28th IEEE Con- ference on Decision and Control,1989: 2708-2712.
[3]宋永华,孙元章,秦世引,等.混成动态系统引论[M].北京:清华大学出版社,2007(12):3-7.
[4]张曙光.CTCS-3级列控系统总体技术方案[M].北京:中国铁道出版社,2008.
[5]铁道部科技司.CTCS-3级列控系统标准规范-CTCS- 3级列控系统系统需求规范(SRS)[S].北京:中国铁道出版社,2009.
[6]IEEE Std 1474. 1-2004(R2009).IEEE Standard for Communications-Based Train Control (CBTC) Performance and Functional Requirements[S].2004:6-33.
[7]边 远.基于混成自动机的主防护式CBTC车载系统开发方法[D].北京:北京交通大学,2011(12).
责任编辑 陈 蓉
Over-speed protection algorithm for Onboard System of CTCS of High-speed Railway
YI Chenglong
( China Railway Siyuan Survey and Design Group Co., Ltd., Wuhan 430063, China )
As a core system in CTCS-3(Chinese Train Control System Level 3), the Onboard System was a typical safety-critical system, the over-speed protection algorithm had an important inf l uence on Train Control System. Based on high-speed train dynamics model, time delay characteristics, and mixed features, the paper proposed vehicle overspeed protection algorithm and hybrid modeling method. The simulation of over-speed protection algorithm was implemented by using Simulink/Statef l ow mixed technology. The interval two train tracking scenario was taken as an example to validate the algorithm. The simulation showed that this over-speed protection algorithm was verif i ed, collision avoidance of two trains running in a block section could be implemented.
Onboard System; automatic train protection; Simulink/Statef l ow; two train tracing; simulation
U284.482∶TP39
A
1005-8451(2015)08-0050-07
2014-12-21
易承龙,助理工程师。
猜你喜欢
铁道通信信号(2020年1期)2020-09-21 08:55:16
铁道通信信号(2020年1期)2020-09-21 08:54:42
铁道通信信号(2020年8期)2020-02-06 09:13:18
铁道通信信号(2019年2期)2019-03-26 06:39:38
铁道通信信号(2018年9期)2018-11-10 03:26:40
铁道通信信号(2018年7期)2018-08-29 01:17:02
中国公共安全(2017年11期)2017-02-06 05:28:09
铁道通信信号(2016年8期)2016-06-01 12:10:21
电源技术(2015年2期)2015-08-22 11:28:14
中国铁道科学(2015年6期)2015-06-21 06:54:54
