基于VANET的车辆相对定位技术
2015-06-26 15:55:18李中海刘南杰黄波
网络安全与数据管理 2015年19期
李中海,刘南杰,黄波
(南京邮电大学通信与信息工程学院,江苏南京210003)
基于VANET的车辆相对定位技术
李中海,刘南杰,黄波
(南京邮电大学通信与信息工程学院,江苏南京210003)
为了满足VANET(Vehicular Ad-hoc Network)中对车辆位置信息的高精度要求,本文研究了一种基于全球定位系统(Global Positioning System,GPS)伪距双差和有高精度里程仪的惯性导航(Inertial Navigation Systems,INS)的协作相对定位方法。通过数据融合技术,将GPS伪距双差、GPS信号的多普勒频移以及被高精度里程仪修正后的INS加速度等数据进行融合处理,获得具有良好精度的相对定位结果。结果表明,使用该方法的定位性能优于无里程仪和INS的定位性能。
GPS;惯性导航;里程仪;相对定位
0 引言
为满足现代车辆安全行驶以及车辆定位等应用对定位精度的高要求,迫切需要更高水平更高精度的车辆定位技术的研究和使用。在现有全球卫星导航系统[1-2](Global Navigation Satellite Systems,GNSS)与定位技术的基础上,针对原有定位技术存在定位精度不高,以及在GPS伪距双差相对定位时,GPS信号存在短时间中断的问题,本文研究了一种基于全球定位系统(GPS)伪距双差和有高精度里程仪的惯性导航(INS)的协作相对定位技术。该技术在原有GPS伪距双差相对定位技术的基础上,添加有高精度的里程仪惯性导航系统INS的测量器件。INS测量器件用来补充GPS短时间中断时的车辆位置信息,高精度的里程仪用来修正INS的积累误差,然后将GPS伪距双差、GPS信号的多普勒频移与被高精度里程仪修正后的INS加速度等数据信息进行融合分析,从而可以获得更高精度的车辆相对定位。
1 车辆协作相对定位方法
本文所研究的是有高精度里程仪的INS/GPS伪距双差的协作相对定位。先假设研究的车辆上已装有GPS接收机、INS设备以及高精度的里程仪,同时目标车辆所在的区域GPS信号覆盖良好,接收机可以观测到5颗以上的可见卫星,并且车辆之间能够进行车与车(Vehicle to Vehicle,V2V)通信,共享数据信息[3]。
1.1 现有的GPS伪距双差的相对定位方法
在t时刻,节点k处的GPS接收机与卫星i之间伪距观测值[2]为:

其中,Rki为节点k处的接收机与卫星i之间的几何距离,c为光速,δk为节点k处接收机的时钟误差,δi为卫星i的时钟误差,εi,ion为电离层误差,εi,trop为对流层误差,εi,sate为卫星i的轨迹误差,为接收机k处的热噪声与来自卫星i的信号多径误差。
由于卫星的时间差别和高空层等误差对处于同一区域的车辆来说近似相同,因此可以通过对同一观测卫星的不同的GPS接收机进行差分消除这些公共误差。如使用不同车辆k、l对同一卫星i进行观测,其伪距单差为:

对车辆间的伪距单差进一步求差分,可得伪距双差
l(t)方法,在有4颗以上的可见卫星时,可以通过最小二乘法获得车辆间相对位置rkl(导航系下的相对位置信息)的结果[4]。
1.2 改进的GPS伪距双差相对定位方法
1.2.1 车辆间基于载波频移的相对速度的测量
在t时刻,车辆k的GPS接收机与卫星i之间GPS的载波相位伪距[5]可以参考上节中的GPS伪距双差表示为[2]:

相位伪距对时间求导,可得接收机k从卫星i处接收到的信号的载波频率偏移[2],并能从中提取多普勒频移:

其中,f是GPS信号的载波频率,GPS信号使用L1= 1 575.42 MHz,λ是GPS L1信号的波长,(t)是观测噪声。
车辆k与车辆l对于卫星i的载波频移单差为:

其中,vkl=vk-vl是指车辆k、l之间的相对速度。由于卫星移动(卫星移动速度约3 km/s)引起的式(4)和式(10)中单位向量的变化较小,并且这种变化与车辆到卫星距离(20 000 km)相比,可以忽略不计,因此,ei和ej可以直接采用任何一辆车辆的接收机所在的最终位置,然后结合卫星星历进行计算得到。vkl可以通过多普勒频移解算得到[6]。
1.2.2 车辆间基于INS的相对加速度的测量
车辆k、l之间的相对加速度矢量akl=ak-al,其中ak、al分别是车辆k、l的加速度矢量。两车之间的相对加速度akl、相对速度vkl、相对位移rkl以及GPS卫星的定位信息都定义在导航坐标系下。
INS在本设计中主要为车辆提供加速度以及方位角信息。欧拉角用来构建姿态矩阵然后将INS提供的载体坐标系下的车辆加速度信息,根据将其从载体坐标系转换到导航坐标系[2]中。

求导后可以进一步转化为:

假设目标车辆在道路行驶时不发生路边滑动或者偏离地面,也即在载体坐标系下,沿Y轴、Z轴的速度分量为0,车辆仅沿X轴方向行驶,车辆k在载体坐标系下的速度大小为,可以由INS中的IMU提供的加速度通过一次对时间的积分得到,载体加速度与导航加速度满足如下关系式[7]:

其中,g是重力加速度,ωz、ωy是INS测量器件提供的车辆在载体系下沿各轴旋转的角速度,通过公式vk=可以求得偏航角ψ,进而得到姿态矩阵最终实现加速度由载体系到导航系的变换。考虑惯性导航技术存在误差积累的问题,再使用参考文献[7]中的高精度里程仪与惯性导航组合的方式,修正INS的误差,提高其信息精确度。
1.2.3 融合数据信息的分析方法
卡尔曼滤波器是协作定位技术进行数据融合分析的关键,在本文中,使用卡尔曼滤波器将本地数据与接收到的数据进行融合分析时的状态模型[8]为:

其中,χ为状态向量,F是滤波器的传输函数模型,G是噪声处理模型,ζ是沿着各轴的高斯相对加速度噪声,假设其均值为零、方差为σζ,抽样间隔为τ。对于车辆k、l,状态向量、滤波器传输模型以及噪声处理模型分别为:

其中,0n是n×n的零矩阵,In是n维单位矩阵,Q=σζ2GGT是处理噪声协方差。假设对于车辆k、l,可见卫星为m颗,则观测模型为:

H是观测模型,ξ是观测噪声,考虑伪距双差和GPS信号的多普勒频移以及INS提供的加速度,可得如下的观测模型:

其中,O′为(m-1)×3的零矩阵,假设各观测量之间相互独立,则观测噪声的协方差可以表示为:


其中1表示一个全为1的(m-1)×1矩阵。已知H、F、Q、G时,就可以使用卡尔曼滤波器实现相对定位。
2 仿真结果与分析
本文采用测量距离均方根drms来分析INS/GPS伪距双差和GPS伪距双差相对定位的性能。对车辆i相对参与协作的车辆数为5,GPS伪距测量观测误差的标准差为σρ=3 m,可见卫星数目为4~7颗,仿真结果如图1、图2所示。
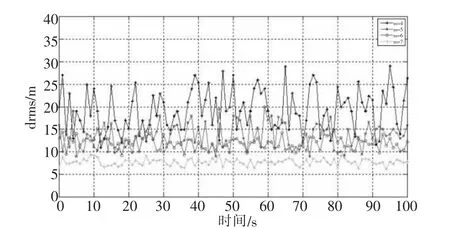
图1 改进前伪距双差相对位置的drms
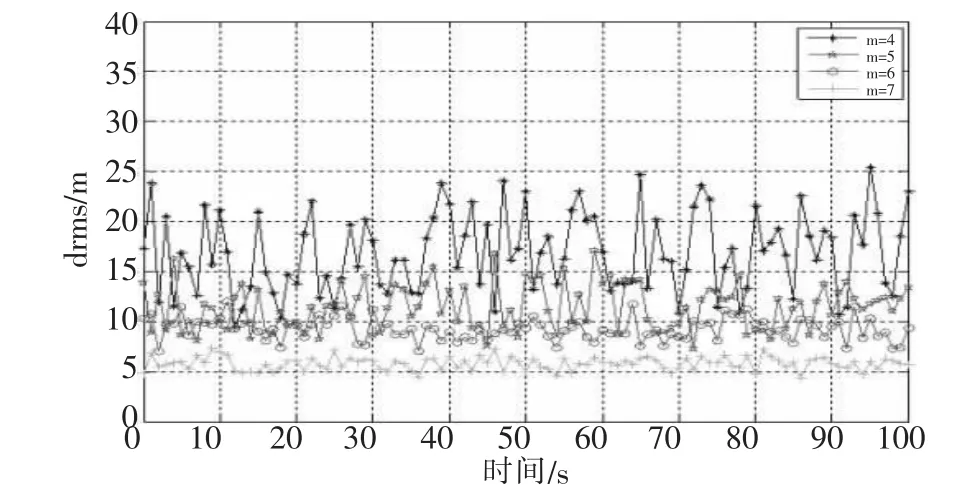
图2 改进后伪距双差相对位置的drms
采用GPS/INS或GPS伪距双差两种方法进行相对定位时,相对定位距离均方根drms都随着卫星数目的增加而减小,也即可见卫星数目越多,定位性能越优。如图2为在GPS伪距双差基础上改进的GPS/INS伪距双差,对比图1中改进前的相对定位均方根误差drms,在高精度里程仪与INS器件的作用下,GPS伪距双差相对定位的drms有所减少,也即是采用本文方法优于GPS伪距双差的定位性能。
3 结论
本文主要介绍了有高精度里程仪的INS/GPS伪距双差的协作相对定位技术。在现有伪距双差定位技术的基础上,添加INS测量器件和高精度的里程仪,再通过数据融合分析处理技术,将被里程仪修正后INS的加速度信息、GPS信号的多普勒频移信息以及GPS伪距双差的相对定位信息进行融合分析处理,从而改进了GPS伪距双差的相对定位性能。在本文中,要求车辆GPS接收机可见卫星数不少于5颗,通过仿真对比,证明了使用INS后的伪距双差定位性能得到显著提高。
[1]WELLENHOF B H,LICHTENEGGER H,WASLE E.全球卫星导航系统GPS,GLONASS,Galileo及其他系统[M].程鹏飞,蔡艳辉,文汉江,等,译.北京:测绘出版社,2009.
[2]KALPLAN E D,HEGARTY C J.GPS原理与应用[M].寇艳红,等,译.北京:电子工业出版社,2007.
[3]常促宇,向勇,史美林.车载自组网的现状与发展[J].通信学报,2008,28(11):116-126.
[4]JUNGLAS I A,WATSON R T.Location-based services[J]. Communications of the ACM,2008,51(3):65-69.
[5]DISSANAYAKE G,SUKKARIEH S,NEBOT E,et al.The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications [J].IEEE Transactions on Robotics and Automation,2001, 17(5):731-747.
[6]任小伟,熊帅,杨文辉.卫星导航相对定位技术研究[J].全球定位系统,2014,39(2):54-59.
[7]胡彦亮.基于INS/GPS、INS/里程仪冗余的车载组合导航系统[D].哈尔滨:哈尔滨工程大学,2008.
[8]GREWAL M S,ANDREWS A P.Kalman filtering:theory and practice using Matlab(3rd edition)[M].Hoboken:Wiley &Sons,Inc,2008.
[9]AKEILA E,SALCIC Z,SWAIN A.Direct gravity estimation and compensation in strapdown INS applications[C]. Sensing Technology,2008.IEEE 3rd International Conference on ICST 2008,2008:218-223.
[10]TEASLEY S P,HOOVER W M,JOHNSON C R.Differential GPS navigation[C].PLANS′80-Po-sition Location and Navigation Symposium,1980:9-16.
Relative positioning technology for vehicular based on VANET
Li Zhonghai,Liu Nanjie,Huang Bo
(College of Communication and Information Engineering,Nanjing University of Posts and Telecommunications,Nanjing 210003,China)
In order to meet the requirements of vehicle position high accuracy applications in VANET,a relative positioning method based on GPS pseudorange double difference and INS system which adds an odometer with high accuracy in a collaborative manner is studied in this paper.The data fusion algorithm is used to fuse the GPS pseudorange double difference,GPS Doppler shifts and the INS data,thus it highly improves the accuracy of relative positioning results.The results show that the positioning performance of this method is obviously improved compared with the one without the INS and odometer.
Global Positioning System;inertial navigation;odometer;relative positioning
TP393.0
A
1674-7720(2015)19-0071-03
2015-05-13)
李中海(1990-),男,硕士研究生,主要研究方向:车联网、大数据。E-mail:806343240@qq.com。
李中海,刘南杰,黄波.基于VANET的车辆相对定位技术[J].微型机与应用,2015,34(19):71-73,79.
刘南杰(1956-),男,博士,教授,主要研究方向:车辆网、智能交通。
黄波(1975-),男,博士,讲师,主要研究方向:车联网、信号处理。
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18 06:41:26
大地测量与地球动力学(2022年1期)2022-01-11 10:23:02
大地测量与地球动力学(2021年10期)2021-04-17 00:51:00
石油地球物理勘探(2017年4期)2017-12-18 07:14:49
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘通报(2016年12期)2017-01-06 03:37:13
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41