基于最小二乘法的激光位置自动调整方法研究
2015-06-24 13:00邵永谦郭唐永张鑫等
软件导刊 2015年6期
关键词:最小二乘法
邵永谦 郭唐永 张鑫等


摘要:卫星激光测距中传统的激光脉冲光束位置调整需反复不断进行,人工劳动强度较大。为能更好地调整激光脉冲光束的位置,设计一个自动判定光轴与机械轴是否重合并调整的系统,并进行仿真实验。
关键词:卫星激光测距;最小二乘法;圆拟合;光路调整
DOIDOI:10.11907/rjdk.151344
中图分类号:TP301
文献标识码:A 文章编号:16727800(2015)006003303
基金项目基金项目:
作者简介作者简介:邵永谦(1988-),男,湖北武汉人,中国地震局地震研究所硕士研究生,研究方向为地震观测技术。
0 引言
卫星激光测距(Satellite Laser Ranging)技术是一项应用广泛的空间大地测量技术[1]。进行卫星激光测距时,计算机根据星历预报软件生成跟踪文件,此文件包含预测出的卫星在当前时刻的高度角和方位角,以及卫星和测量台站之间的距离,由此生成卫星在当前时刻位置的期望值;控制系统将生成的期望值发送给伺服跟踪系统,伺服系统驱动动力矩电机跟踪卫星轨道,使发射镜和接收镜始终对准卫星。然后向配备了后向反射棱镜的卫星发射激光脉冲信号。发射镜和接收镜在观测期间持续跟踪卫星,如果发射光的光轴与转台系统的机械轴不重合,就会造成发射的激光脉冲光束逐渐偏移,导致脱靶率提高,从而对观测数据的质量造成影响。传统的调整方式通过人工观察CCD屏幕中激光脉冲光束是否随着望远镜移动而发生偏移,如果发生偏移就通过观测人员反复调整,改变反射光轴指向,直到光轴与机械轴重合为止。利用此方法需不断进行调整,增加了人工劳动强度。本文设计了一个自动判定光轴与机械轴是否重合并调整的系统,能有效提高调整效率及实现自动化调整。
1 系统构成及工作流程
自动判定光轴与机械轴是否重合并调整的系统(见图1)主要由CCD/CMOS摄像机、数据处理模块和调整反射镜姿态电机组成。经反射镜反射的激光脉冲光束在CCD/CMOS传感器图像平面上成像,当光轴与机械轴不重合时,激光脉冲光束会随望远镜的移动而逐渐偏移,在CCD/CMOS传感器图像平面上成像的光斑就会发生移动,系统就自动判定光路需要调整。通过对光斑轨迹进行计算处理得到调整后光斑的位置,最后将调整前后的位置差值回馈给电机移动反射镜使光轴和机械轴重合。此外,判定光轴与机械轴是否重合需要调整两个点,因此在反射镜前需添加一台CCD/CMOS摄像机,其工作流程同上。本设计中光斑中心点和光斑移动轨迹圆心的求取分别用重心法和最小二乘法。
2 基于重心法的光斑中心拟合
本设计要求取光斑移动轨迹的中心(即机械轴在图像平面上成像的点)在图像平面上的坐标,需要在此之前找到光斑的中心点。常用的方法有Hough变换法、最小二乘圆拟合法和文献[2\]~[4\]中所使用的重心法。重心法相对前两种方法计算精度更高,并且只需遍历一幅图像的轮廓后,就可以计算出光斑的中心,满足设计的需要,故采用重心法对光斑移动轨迹进行圆拟合。常用的重心法有二值化重心法和阈值灰度重心法。其中,二值化重心法中设光斑大小为(M*N),经过阈值T判断后得到二值图像,定义为:当f(i,j)≤T时,f(i,j)=0;当f(i,j)>T时,f(i,j)=1。
虽然灰度平方加权重心法的计算速度比二值化重心法稍慢,但计算精度比后者更高,即使光斑形态不近似于高斯分布,使用该方法也能准确计算出光斑的重心。
3 由最小二乘圆法定位光斑移动轨迹圆心实验仿真及精度分析
算出光斑中心点后,还需要对光斑移动轨迹取点进行圆拟合求出圆心坐标。拟合方法除了最小二乘圆拟合法外,还有文献[5]、[6]中采用的以圆心或半径为约束条件的最小二乘圆拟合法。在本文设计中,圆心是待求量而半径是未知且不可测量的,有约束条件的最小二乘圆拟合法并不适用,因此设计采用最小二乘圆拟合法。
3.1 仿真实验设计
受光斑中心拟合精度以及图像特征提取中不确定度等因素的影响,提取圆弧上的特征点数据必然存在噪声。对于本方法来说,在光斑中心拟合精度较高的情况下,圆拟合精度与选取的特征点数量有很大的关系。本文通过使用MATLAB编程模拟激光束光轴偏移时光斑的移动轨迹来对拟合精度情况进行分析。由于激光束位置发生偏移,不与转台系统的机械轴重合时,激光束投影在与机械轴垂直的平面上的点是以机械轴为圆心作圆周运动的,并且其圆心位置及圆的半径都是未知的。此外,在某些情况下,光斑的移动轨迹无法形成一个圆而仅仅是一段圆弧,因此对这两种情况分别进行仿真实验。
当光斑的移动轨迹为一个圆时,先作一个圆心为(20,20),半径R=20的圆,均匀在圆上取点并加入高斯噪声作为选取的特征点。用最小二乘法对这些特征点进行圆拟合,将求出的圆心与已知圆圆心进行拟合精度分析。
3.2 拟合精度分析
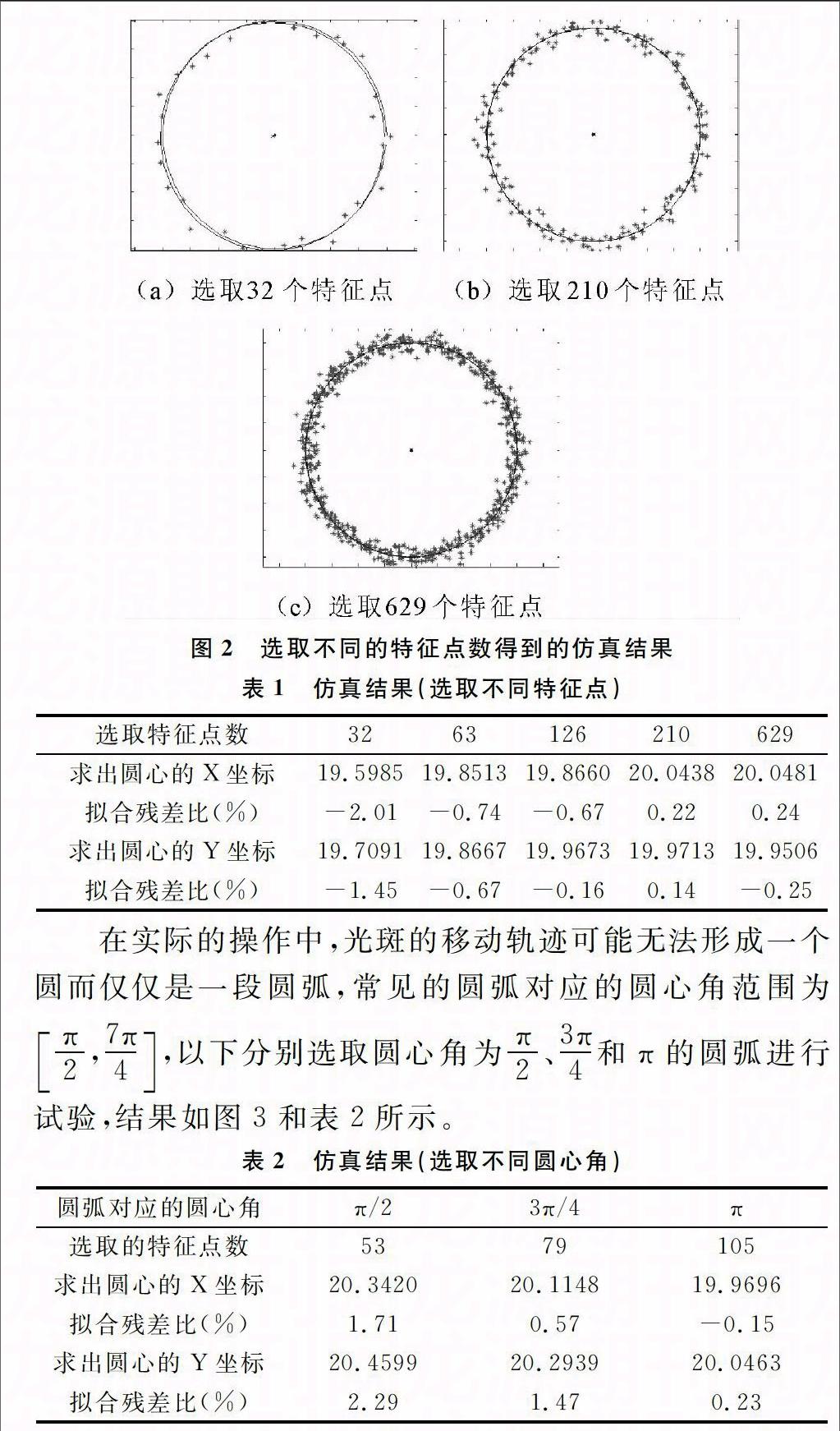
因为在光斑中心拟合精度较高的情况下,圆拟合精度与选取的特征点数量有很大的关系。因此通过保持所加随机噪声参数不变,仅改变所选取的特征点的数量,最后求取圆心位置拟合残差比来分析拟合精度,结果如图2和表1所示。
由表1可以看出,当光斑中心拟合的精度不变时,随着选取的特征点数量的增加,圆拟合的精度也在不断提高。但是增加到一定数量后,所求圆心坐标与给定圆心坐标的拟合残差比保持在一定范围(0.2%左右)内,而且选取的特征点数增多也会造成计算量的增加,给系统增加负担。因此综合考虑,特征点的选取在210左右为宜。
在实际的操作中,光斑的移动轨迹可能无法形成一个圆而仅仅是一段圆弧,常见的圆弧对应的圆心角范围为π2,7π4,以下分别选取圆心角为π2、3π4和π的圆弧进行试验,结果如图3和表2所示。
由表2可以看出,在光斑移动轨迹为一段圆弧的情况下,能选取的特征值数量相比光斑移动轨迹为整圆时大幅减少,造成精度下降。由于光斑中心拟合精度较高,虽然圆拟合的精度随着弧段的减小而逐渐的降低,但拟合精度总体上来说还是令人满意的。
4 结语
为了能对激光光束位置进行更有效调整,减少调整次
数和降低人工劳动强度,设计了一个基于最小二乘法圆拟合定位圆心的自动判定光轴与机械轴是否重合并调整的系统。通过仿真实验,得到了较为理想的结果。该自动判定光轴与机械轴是否重合并调整的方法是可行的,为激光卫星测距系统自动调整提出了新的方法。
参考文献:
[1]郭唐永,李欣,谭业春,李翠霞. 中国新一代流动卫星激光测距系统研究[J\]. 武汉大学学报:信息科学版,2006(1):3134,81.
[2]王志干,刘兆蓉,赵雁,李建荣,刘畅. 变形测量系统中激光光斑中心精确定位算法[J\]. 电子测量与仪器学报,2011(6):485489.
[3]黄富瑜,李刚,何永强,应家驹. 全向激光探测系统中光斑精确定位方法研究[J\]. 激光与红外,2010(11):12241228.
[4]周中亮,周冰,何永强,等. 成像型激光探测系统中光斑精确定位方法研究[J\]. 激光技术,2008(3):248251.
[5]朱嘉,李醒飞,谭文斌,等. 基于圆心约束最小二乘圆拟合的短圆弧测量[J\]. 光学精密工程,2009(10):24862492.
[6]刘珂,周富强,张广军. 半径约束最小二乘圆拟合方法及其误差分析[J\]. 光电子·激光,2006(5):604607.
[7]孟苏飞,樊曙天. 非完整圆弧半径测量方法综述[J\]. 机械管理开发,2006(6):5152,54.
[8]HUANG JIE,ZHOU ZHAO FEI.Study on Ddetection algorithm of the center of asymmetric sampling precision CCD image based on curve fitting[J\].Journal of Optoelectronics Laser ,2004, 15(6):691694.
责任编辑(责任编辑:陈福时)
猜你喜欢
中国新通信(2016年22期)2017-01-13
计算机应用(2016年12期)2017-01-13
财税月刊(2016年5期)2016-08-03
考试周刊(2016年27期)2016-05-26