数字差分技术在测量系统中的应用
2015-06-24 14:42:25张锦斌马万权
无线电工程 2015年11期
张锦斌,马万权
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
数字差分技术在测量系统中的应用
张锦斌,马万权
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
在靶场测量系统中,可以采用多个测量设备协同进行多参数测量来提高测量精度,找出具有强相关性的测量参数(或称测量元素),运用数字差分技术可获得高精度测量结果。为了在工程应用中提高实时处理能力,提出了高效的目标空间坐标的增量算法,给出了试验验证过程和结果。在此基础上设计了利用合作目标构建改进的双站交会测向系统,提出了该被动测量系统的元素相关数据处理模型,拓展了元素相关测量系统的应用领域。
数字差分技术;目标空间坐标的增量算法;无线电测向;元素相关测量系统
0 引言
在飞行器靶场测量系统中,通常采用多个测量设备来提高测量精度[1],交会测量及组网布站是有效手段[2]。采用数字滤波技术可以有效地削弱随机误差的影响[3],但要想消除和减少系统性测量误差的影响,却要采取比较复杂的测量和校验技术。在测量元素具有相关性的情况下,采用经典的数字差分技术,可以有效地消除系统误差的影响[4]。所以在一定意义上讲,获取相关性测量数据,是消除系统误差的关键。为此,在飞行器试验场中,要挖掘和利用现有设备相关性测量数据。本文首先研究在航天飞行器初始段空间坐标测量中,利用电影经纬仪测角数据构造相关性测量元素,提出了采用相关性测量元素和线性化处理相结合的目标坐标增量算法,并给出了试验数据验证结果。
机动目标的测向定位与跟踪一直是个难点。孔博等对机动目标双站无源定位跟踪问题进行了研究,应用Singer模型和扩展卡尔曼滤波进行了仿真分析,得到不同测向精度下的相对测距误差[5]。马丽等在文献中提出了预警机支援下的空地协同目标定位[6],这与构造相关性测量元素系统的思路相似。推而广之,本文提出以合作目标作为参考构建改进的双站交会测向系统,应用目标空间坐标的增量算法推导其测量数据处理模型,便于在设备研制过程中实施。
1 数字差分技术在光测数据处理中的应用
1.1 坐标系设定
用2台电影经纬仪交会测量方法构建的光测系统的坐标系如图1所示。
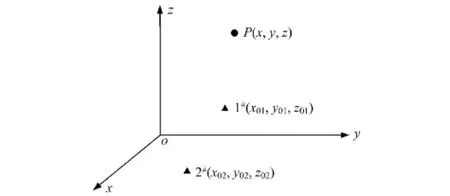
图1 光测系统坐标系示意
图1中,1#、2#表示1号、2号电影经纬仪观测站,其站址坐标分别为(x01,y01,z01)、(x02,y02,z02),被测目标P的空间坐标为(x,y,z)。
1.2 电影经纬仪测量目标空间坐标
采用数字差分技术,研究2台电影经纬仪测量目标空间坐标的交会测量方法,推导出目标空间坐标计算公式如下[7]:
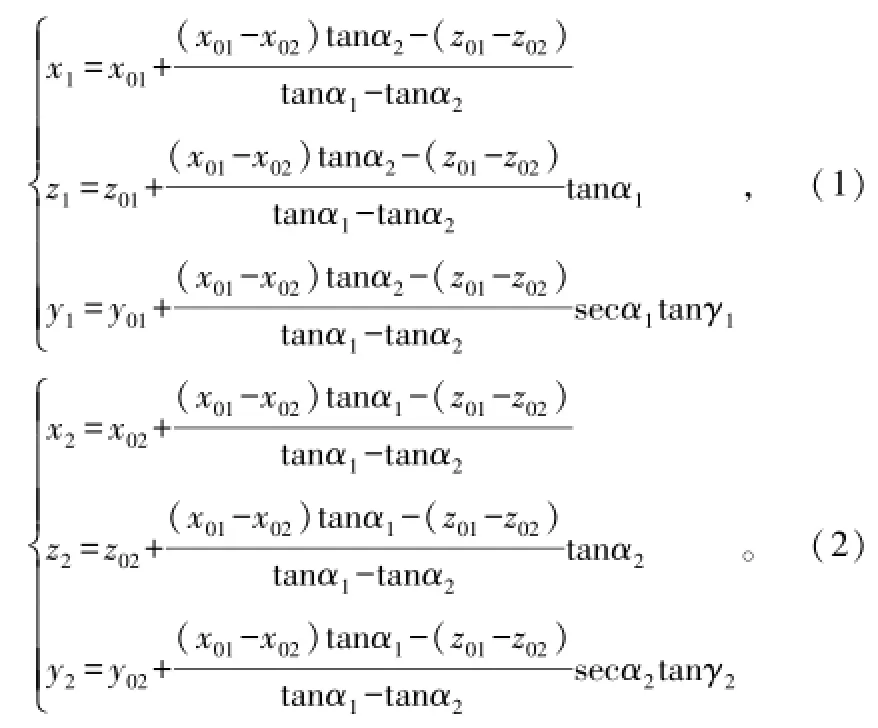
式中:α1,γ1为1#站测量的高低角和方位角;α2,γ2为2#站测量的高低角和方位角。
1.3 目标空间坐标的增量算法
上述计算目标空间坐标的方法是靶场经典的测量计算方法,常用于导弹靶场初始段测量、地空导弹靶场测量。其特点是:光测站能直接观测到发射塔架上的导弹;可以精确给出导弹的初始位置(x0、y0、z0);各光测站可以连续地同步给出目标的角度测量数据。因此,在有了精确的初始位置数据的基础上,只计算坐标增量Δx、Δy、Δz就能给出目标空间坐标。
1.3.1 目标测量元素的相关性处理
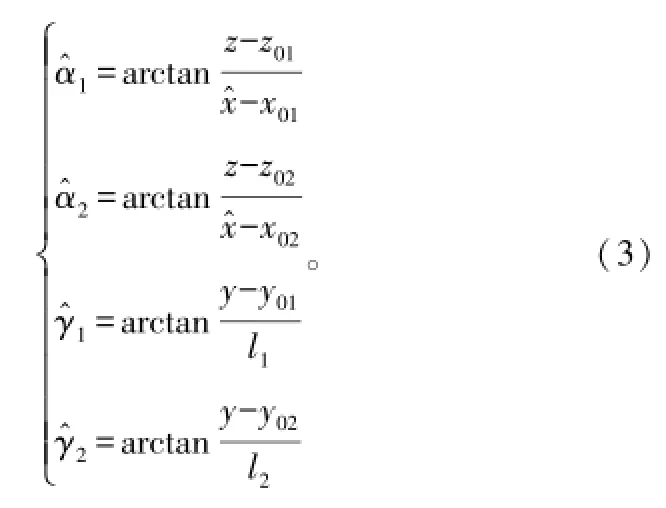
这里强调指出,差分算法亦即坐标增量算法对相关性测量元素才具有抵消系统误差的作用。否则与传统算法无异。利用已经计算出的目标坐标数据,反算出各光测站对目标的高低角和方位角为:
式中,
1.3.2 目标空间坐标的近似算法
目标坐标一阶近似增量方程为:
1.3.3 目标空间坐标的精确算法
在光测数据处理的实践中,一方面由于各种原因,可能满足不了线性化方法所要求的如此狭小的变化范围,即很小的数据采样间隔时间,使随机函数不能够正确地近似于线性;另一方面,在火箭起飞段,由于火箭受发动机推力、地球重力和空气动力的作用,处于变质量动力学运动情况,实际的运动规律与线性化有一定的差别,舍去高级项可能会产生方法误差[8]。为了获得更精确的结果,在台劳展开式中,不仅要保留一阶线性项,而且还要保留若干更高阶的项。这里对台劳展开式取到二阶项,舍去三阶以上的项,则
1.4 目标空间坐标增量算法精度分析
由式(5)知,目标空间坐标增量近似算法的精度可表示为:
式中,σx、σy、σz为总误差。总误差由2项误差合成:一是基准点或上一时刻目标坐标测量误差σx0、σy0、σz0;二是坐标增量的测量误差σΔx、σΔy、σΔz。
基准点(x0、y0、z0)就是导弹发射塔架的定位基点。可以换算到光测设备对导弹的测量点,其精度可以达到cm级。
坐标增量的测量误差可表示为:
由以上公式看出,目标空间坐标的测量精度取决于目标坐标增量的测量精度σΔx、σΔy、σΔz,而坐标增量的测量精度主要取决于目标角度增量的测量精度σΔα、σΔγ。
电影经纬仪的测角误差是由一系列系统误差和随机误差引起的[9]。虽然这些误差可以校准,对随机误差也可以进行平滑滤波。但这些都是导弹飞行试验前或飞行试验后的细致工作,是所谓数据的事后处理。事后处理正在逐步淘汰,而目标空间坐标的增量算法却能够适应系统发展的需求,实时计算出目标空间坐标,并且有效地减小系统误差和其他相关性误差的影响。这是由于坐标增量的精度主要由经过相关性处理的相邻两时刻的角度差的精度所决定的,目标空间坐标增量算法就是在文献[4]阐述的处理相关性测量数据的差分技术基础上提出的,目标空间坐标增量算法的测量精度比传统算法的测量精度高半个数量级以上。
2 目标空间坐标增量算法技术验证
数字差分技术在数据处理过程中自然消除了系统误差,同时还消除了其他相关性误差,因而测量精度较高。基于目标空间坐标增量算法的数字差分测量技术易于实现实时处理。
为了验证这种算法的可行性,采用2个电影经纬仪光测站对导弹进行跟踪测量的模拟飞行试验空间坐标数据进行实际演算[10]。
为了简化计算,只讨论坐标参数x、y的计算。在发射坐标系中,1#光测站和2#光测站的站址坐标为:
演算步骤如下:
①由2个光测站对导弹测量的角度数据(略去)运用式(1)或式(2)算得导弹空间坐标数据;
②运用目标空间坐标的近似算法,即式(3)进行测量元素的相关性处理,进而获得测量元素之差;
③运用坐标增量算法(式(5))获得导弹空间坐标精确值,并得出坐标精度随数据采样率变化曲线如图2所示。
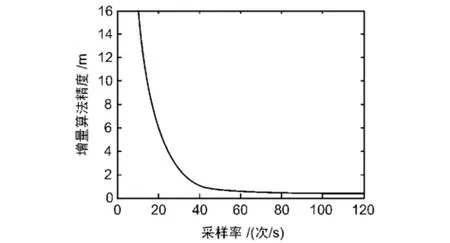
图2 坐标精度随数据采样率变化曲线
由此,获得了一些重要结论:
①坐标增量算法是运用台劳级数对随机函数进行线性化的算法,要求较高的数据采样率。由图2可知,在采样率较小时,例如10~40次/s,数据逼近误差较大,而当数据采样率较高时,例如80~100次/s,则能获得满意的结果。
②测量元素相关性的采用与线性化处理有机地结合,是本算法的又一特点,这使得本算法在数据处理精度上达到了一种新的境界。
③导弹试验场一般采用光学测量设备测量中近程导弹弹道和远程火箭导弹初始段弹道。其坐标测量精度达到很高的水平,约在几米之内。本算法在大致相同的弹道段,其精度可达到零点几米的数量级,其应用价值非同凡响。
④关于电影经纬仪数据采样率是否能达到100次/s,答案应该是肯定的。现代数码摄影技术和电子测控技术达到更高的数据采样率也是可能的。
⑤本例讨论的只是目标空间坐标的近似算法,便于在工程中应用。试验结果表明,只要数据采样率足够高,就能达到满意的精度要求,无需采用目标空间坐标的精确算法。而所谓的精确算法只是采用了更高阶次的修正项,增加了计算的复杂性。
3 差分技术在无线电测向系统中的应用
3.1 改进的双站交会测向系统
通过增加测量站来提高精度是有效的,但是增加到一定程度之后精度将不再提高[11],且系统成本和复杂性大大增加。测量站利用元素相关特性测量原理,改进的侦察测向系统由2套具有多目标测量能力的测向机站和一个前置合作目标P组成,如图3所示。
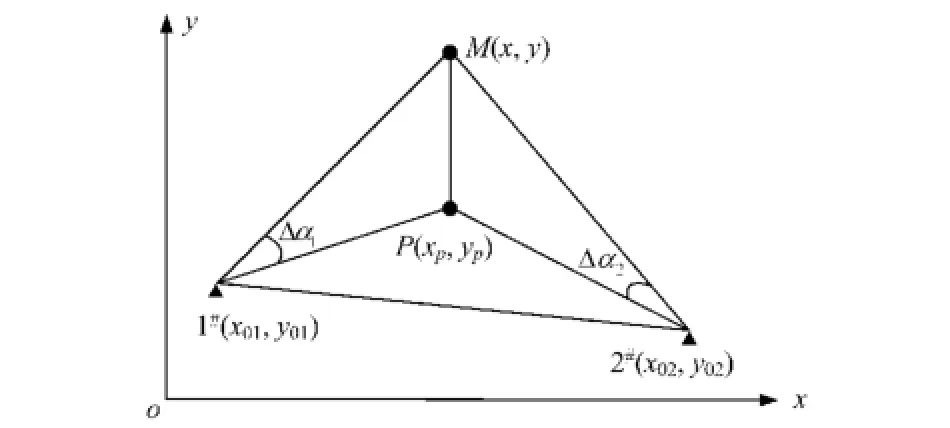
图3 改进的双站交会测向系统坐标系示意
当被测目标M(辐射源)开始活动时,1#、2#测向机站同时侦收其辐射信号,经过处理转化为方位角信号α1、α2,同时接收合作目标的信号方位角α01、α02、同步采样信号和合作目标的位置数据(xpo,ypo)。被测目标M与合作目标的角度差,是真正意义上的“相关性测量元素”的角度差,可采用目标空间坐标增量算法处理后实时输出辐射源的位置数据(x,y)。
3.2 关于合作目标
合作目标作为参考,可以部署在战区边境或有争议海域等缺少参照物的地方,具有如下功能:
①发射固定频率信号;
②有一部北斗卫星导航定位系统的用户终端,可以连续对自身定位;
③发射同步信号,使测向机同步工作;
④适于由飞行器投放;
⑤完成任务后,合作目标可以自毁。
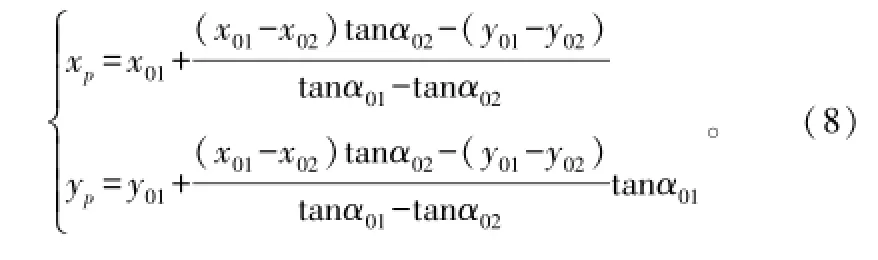
3.3 合作目标定位方程
合作目标的位置方程为:
合作目标定位精度公式为:
合作目标的位置数据可由北斗卫星定位系统地面接收机获得其位置数据。当使用重复测量数据的平均值时,可以获得精度更高的结果:

设当xpi、ypi为N(0,σpo),则
北斗卫星定位精度约为几米,坐标平均值的精度就是米级,因此采用北斗卫星定位系统接收机测量的平均值作为合作目标的坐标值,其精度是足够高的。
3.4 测向系统对辐射源的坐标增量方程
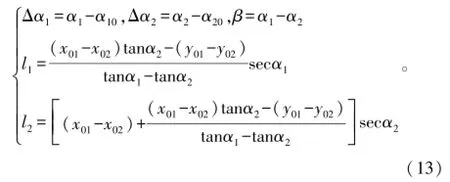
由于测向机具有同时测量双目标的能力,则可用其同时测量辐射源和合作目标的方位角。1#站和2#站测量数据分别为(α1,α01)和(α2,α02),运用差分算法可以计算出辐射源相对合作目标的坐标增量,即
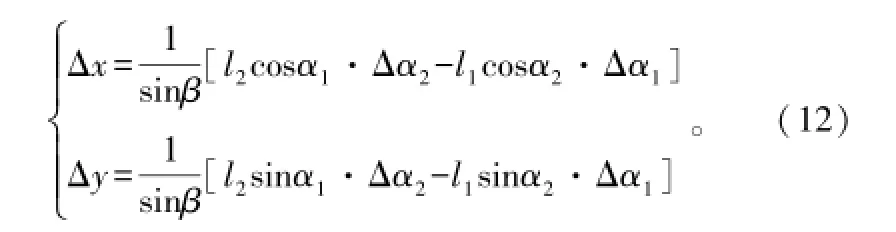
式中,
坐标增量的精度可由下式估算:
这里,方位角的一级差分Δα的误差σΔα已经消除了测角系统误差和其他相关性误差的影响,其量级约为(1/5~1/10)σα。
3.5 测向系统对辐射源观测的位置方程
测向系统对辐射源观测的位置方程为:

其测量精度计算为:

为了进一步消减随机误差的影响,也可以对辐射源进行重复测量[12],以多次测量的平均值为计算结果。
4 结束语
根据构建元素相关测量系统原理,本文采用以合作目标为参照应用于改进的双站交会测向系统中,对边海防封控系统及有争议海域侦察监视预警系统的研制建设有借鉴意义,是“数字差分技术在光测数据处理中的应用”的创新性扩展。传统光测系统利用了作为测量基准的导弹发射塔架;而改进的双站交会测向系统中增加的合作目标可以是机动的,其测量基准是由配有北斗导航卫星系统用户终端动态提供,在提高实时测量精度的基础上,可扩大了测向系统的测量区域范围,增强系统部属的灵活性。
[1]郭伟锋.靶场测控多传感器的布站优化综述[J].舰船电子工程,2011,31(4):23-27.
[2]侯宏录,周德云.光电经纬仪异面交会测量及组网布站优化设计[J].光子学报,2008,37(5):1 023-1 027.
[3]张锦斌,马万权,黄 巍.运用卡尔曼滤波理论求解测速雷达系统误差[J].飞行器测控学报,2000,19(4):80-88.
[4]张锦斌,马万权.用差分法处理相关性测量数据的方法探讨[J].飞行器测控学报,2014,33(1):44-51.
[5]孔 博,修建娟,修建华.基于Singer模型的机动目标无源定位跟踪方法研究[J].电光与控制,2011,18(5):14-18.
[6]马 丽,张平定,刘 飞.预警机支援下的空地协同目标定位研究[J].电光与控制,2009,16(2):39-41.
[7]张锦斌.火炮测速雷达随机误差计算方法[J].无线电工程,1996,26(4):13-22.
[8]张锦斌.飞行器相遇过程参数的数据处理[J].无线电工程,1994,24(4):1-18.
[9]刘 敏,雷 斌.靶场光电经纬仪测量数据的误差分析及数据处理[J].国外电子测量技术,2007,26(11):12-14.
[10]张金槐.飞行器试验统计学[M].北京:国防科技大学出版社,1984.
[11]卢发兴,高 波,邢昌风,等.测量站数量对多站测向交叉定位精度的影响[J].火力与指挥控制,2011,36(2):69-72.
[12]刘聪峰.无源定位跟踪技术[M].西安:西安电子科技大学出版社,2010.
Application of Digital Difference Technology in Data-processing of Measurement System
ZHANG Jin-bin,MA Wan-quan
(The 54th Research Institute of CETC,Shijiazhuang Hebei 050081,China)
In measuring systems of test ranges,multiple instruments are used to cooperate to measure parameters of flying objects,and to process element-related parameters(or elements)to minimize the influence of correlation errors and provide measurement results with higher accuracy.An incremental algorithm for calculating object space coordinates is put forward to simplify the digital differential method of data-processing procedure,and it is verified in an experiment.To apply the results,a collaborated object is provided to improve the two-station cross-location radio direction finding system,and the model of the data processing system is illustrated.
digital differential technology;incremental algorithm for calculating object space coordinates;radio direction finding;element-related measuring system
TN95
A
1003-3106(2015)11-0064-05
10.3969/j.issn.1003-3106.2015.11.17
张锦斌,马万权.数字差分技术在测量系统中的应用[J].无线电工程,2015,45(11):64-68.
张锦斌男,(1936—),研究员。主要研究方向:飞行器测量系统的测量方法和精度研究。
2015-08-18
马万权男,(1966—),研究员,硕士生导师。主要研究方向:指挥控制信息系统技术、航天地面管控系统。[J].地理空间信息,2013,11(2):107-110.
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:12:22
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
电子制作(2018年11期)2018-08-04 03:25:38
电信科学(2016年9期)2016-06-15 20:27:25
测绘科学与工程(2016年5期)2016-04-17 06:51:15
信息安全研究(2015年3期)2015-02-28 20:17:57
电子设计工程(2015年16期)2015-02-27 12:07:58
电子设计工程(2015年3期)2015-02-27 12:03:45
太空探索(2014年1期)2014-07-10 13:41:50