
基于虚拟仪器的直流电机模糊PID控制实验研究
2015-06-23 12:20费红姿范立云费景洲杨家龙
实验技术与管理 2015年3期
费红姿,范立云,费景洲,刘 友,董 全,杨家龙
(哈尔滨工程大学能源与动力工程学院,黑龙江哈尔滨 150001)
仪器设备研制与应用
基于虚拟仪器的直流电机模糊PID控制实验研究
费红姿,范立云,费景洲,刘 友,董 全,杨家龙
(哈尔滨工程大学能源与动力工程学院,黑龙江哈尔滨 150001)
应用ELVISⅡ虚拟仪器实验平台对直流电机模块进行模糊PID速度控制实验设计。首先分析了电机的控制原理,在LabVIEW环境中设计了PID控制器及切换式模糊PID控制器,并对实验数据进行对比分析,与PID控制相比,模糊PID控制响应速度快、稳态精度高。最后进行了电机模块控制实验设计。实验教学结果表明:基于虚拟仪器设计的模糊PID速度控制实验可以激发学生学习控制系统设计的兴趣,调动学生的主动性,进一步提高实验教学质量。
直流电机;模糊PID控制;虚拟仪器
电机转速控制是控制类课程实验的典型项目,传统的实验系统通常由控制器、驱动器和电机组成,其特点是硬件电子线路和系统软件固定,学生在实验过程中只是按照固定的步骤去做,不方便学生自行设计和二次开发,系统可扩展性差[1-2]。
虚拟仪器是以计算机为核心,配以相应功能的硬件作为信号的输入输出接口,利用软件开发平台在计算机上虚拟出仪器的面板和功能,在此平台上能为用户提供更广阔的发挥空间[3]。基于虚拟仪器技术建立的开放式实验教学平台可以给予学生更大的发挥空间,是未来实验教学发展的必然趋势[4-5]。ELVISⅡ是NI公司推出的虚拟仪器平台,可以实现教学仪器、数据采集和实验设计一体化。在该平台上可以进行电子电路的设计与测试、控制系统设计与实验等,具有很好的可通用性[67]。本文在基于ELVISⅡ虚拟仪器实验平台上设计了直流电机的转速控制实验系统,应用模糊PID控制算法设计了控制器,改善了控制效果。此实验系统可以将原来单一的验证性实验模式发展为开放式的实验模式,为学生提供一个开放式的软件及硬件平台。
1 基于ELVISⅡ的直流电机控制实验平台
1.1 ELVISⅡ简介
教学实验套件是为课堂或实验室服务的先进教学平台,可以进行电路设计、仪器控制、嵌入式/单片机等课程的理论教学。ELVISⅡ原型实验板具有很好的通用性,通过外部接口金手指插槽可以连接不同的功能模块,也可以根据需要自行设计功能模块,并在LabVIEW软件环境下编写相应的程序,完成数据采集、控制、保存、分析和显示功能,ELVISⅡ虚拟仪器平台如图1所示。

图1 ELVIS虚拟仪器平台
1.2 直流电机控制模块
直流电机控制模块如图2所示,由伺服电机、功率放大器组成,通过金手指连接端子插在ELVISⅡ实验箱上。

图2 直流电机控制模块
伺服电机的额定电压为12V,转速为1 900 r/min,功率放大器的输入为脉宽调制信号(PWM),功率放大器的输出信号驱动伺服电机,放大器增益为2.3。在伺服电机上装有一个光电编码器和转速传感器,用于测量电机轴转过的角度和电机转速。直流电机控制模块可以实现电机的旋转角度和电机转速控制。编码器和转速传感器与ELVISⅡ上的数据采集单元相连,获得电机转过的角度和转速信号,并传输给控制器,与期望值进行比较得到偏差,再经过控制器得到输出,然后将控制器的输出转化为PWM信号给功率放大器,改变电机的输入电压,从而实现对电机的控制。
2 直流电机控制模块实验原理
电机速度控制系统是测控类课程实验的典型项目,本文主要研究电机转速控制实验系统。
直流电机速度控制原理如图3所示。通过转速传感器测得直流电机的转速信号,经过信号调理电路,DAQ数据采集得到电机的实际转速,设定转速与实际转速的偏差传输给速度控制器,速度控制器的输出转化为脉宽调制信号给功率放大器,改变电机的输入电压,从而改变电机的转速。
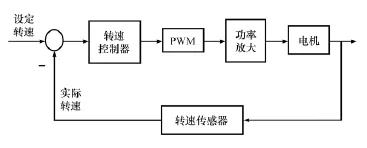
图3 直流电机速度控制原理框图
应用ELVISⅡ虚拟仪器实验平台设计的直流电机转速控制实验的硬件系统结构如图4所示,包括计算机、ELVISⅡ实验平台及直流电机模块3部分。模拟输入用AI4通道采集输入信号,设定采样时钟的采样率为40 Hz,每通道采样长度为1 000点,采用连续采样模式。模拟输出程序把控制量用AO0通道输出。
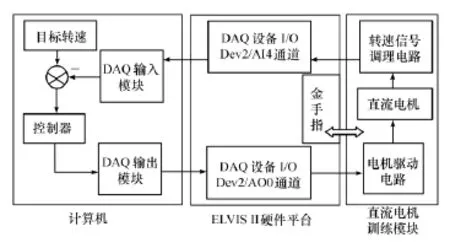
图4 直流电机控制硬件结构
3 速度控制器设计
3.1 PID控制器设计
直流电机PID控制程序框图如图5所示。比例系数Kp=0.178、积分系数Ki=0.01、微分系数Kd=0,电机由1 000r/min上升到1 500r/min的转速曲线如图6所示。从曲线图中可以看出,PID控制的响应速度较慢,电机达到期望转速的时间比较长。
3.2 模糊PID控制器设计
PID控制适合于线性控制系统,而电机在转动的过程中存在一定的非线性,单纯的PID控制很难满足快速而稳定的控制要求。模糊控制是通过专家经验制定的决策表来决定控制量,具有系统响应速度快、超调小、过渡过程时间短等优点。但是由于模糊控制通常采用误差与误差的变化率作为控制器输入,本质上相当于非线性PD控制,存在小偏差附近下控制效果不好和稳态控制精度不高的缺点。本文吸取了上述2种控制策略的优点,将模糊控制和PID控制结合起来,设计了切换式模糊PID控制器。即大偏差时采用模糊控制,小偏差时采用PID控制,可实现比较好的控制效果。
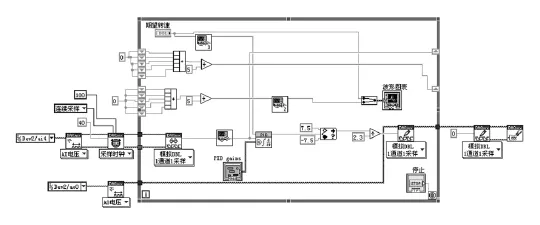
图5 直流电机PID控制程序框图
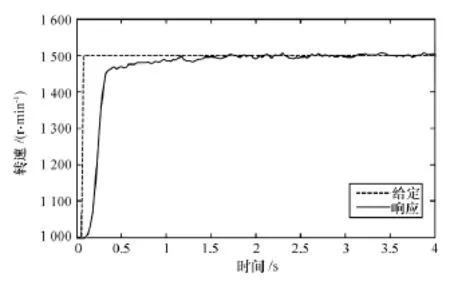
图6 电机转速PID控制
3.2.1 变量模糊化
本文采用二维模糊控制器,即以电机转速误差、误差的变化率作为输入,u(t)作为控制器的输出。根据直流电机的实际转速控制状况,电机转速误差e(t)的变化范围为[-150,150]r/min,误差变化率de(t)/dt的变化范围为[-100,100]r/min,它们的模糊论域均为[-6,6],所以转速误差e(t)的量化因子为Ke=0.04,误差变化率de(t)/dt的量化因子为Kde=0.06。模糊控制器的输出量u(t)的变化范围为[-7.5,7.5],量化因子为Ku=0.9。每个量化因子在控制过程中可调。转速误差e(t)和控制量u(t)取7个模糊子集,直流电机在控制过程中,转速误差变化率de(t)/dt的变化对电机转速的变化趋势影响较大。因此,转速误差变化率de(t)/dt的模糊子集划分应更细致,取8个模糊子集。得到的u(t)与e(t)和de(t)/dt的映射关系如图7所示。
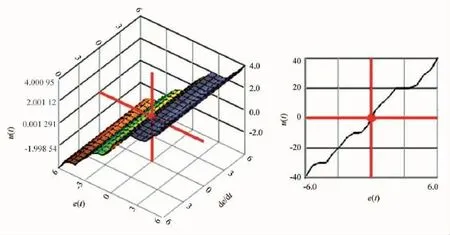
图7 u(t)与e(t)和de/dt的映射关系
3.2.2 模糊PID切换控制器设计
通过开关来实现2种控制算法的切换。阈值为最大误差的绝对值,当误差大于阈值时切换到模糊控制,当误差小于阀值时切换到PID控制。直流电机的额定转速为1 900r/min,稳态调速率2%左右,直流电机稳态可认为是线性或准线性。电机稳态附近采用PID控制,通过仿真确定转速误差e=40r/min为切换量时,控制效果较好。根据上述分析,本文模糊PID控制器的开关切换量e=40r/min,|e|≥40r/min时采用模糊控制,|e|<40r/min时采用PID控制。
直流电机模糊PID控制程序如图8所示。
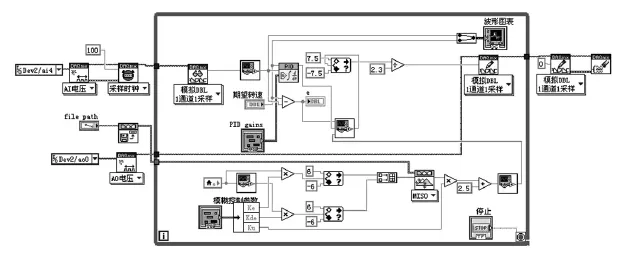
图8 直流电机模糊PID控制程序框图
得到的电机转速模糊PID控制曲线见图9。模糊PID控制与PID控制的响应指标比较见表1。
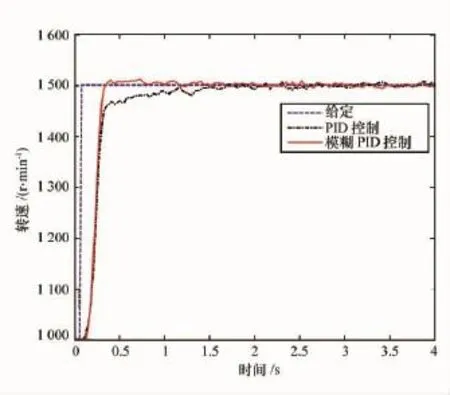
图9 电机转速模糊PID控制实验曲线
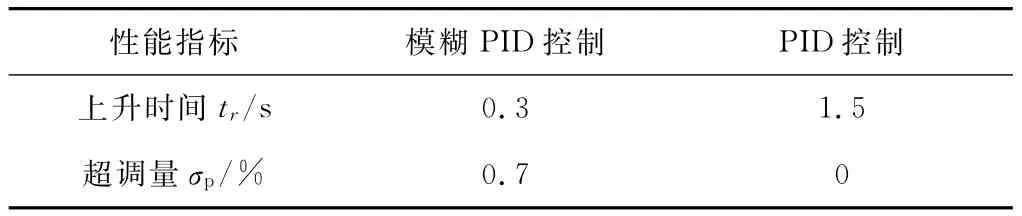
表1 模糊PID控制与PID控制的响应性能指标
从响应曲线可以看出,模糊PID控制的响应速度比PID控制快,电机达到期望转速的时间短,控制精度也比较高,控制效果比较理想。
4 直流电机速度控制实验设计
直流电机控制实验是自动控制原理课程的实验之一。学生在学习有关LabVIEW编程和控制算法的基础上,参照上述提供的控制器设计方法进行控制器的设计,通过在虚拟仪器面板上直观地操作控制器参数,掌握控制器的调节特性,对理论知识会有更深刻、更具体的理解。
4.1 实验界面
用LabVIEW编程实现直流电机转速控制实验的人机交互界面如图10所示。实验中可以实现模糊控制器和PID控制器参数调节、数据存储、数据显示等功能。
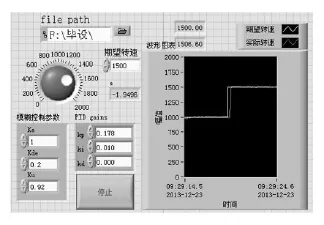
图10 直流电机转速模糊PID控制人机交互界面
4.2 实验步骤
对电机转速进行PID控制和模糊PID控制实验,输入1 000r/min阶跃到1 500r/min阶跃信号,测电机的阶跃响应曲线。操作步骤:
(1)连接好ELVISⅡ虚拟仪器教学实验套件,确保信号采集和输出正常。
(2)PID控制实验。在人机交互面板上设定期望转速为1 000r/min,PID控制参数设置初始值:Kp=0.178、Ki=0.01、Kd=0。改变PID控制参数,观察控制效果。
(3)模糊PID控制实验。为了比较PID控制和模糊PID控制的效果,PID控制参数设置初始设置:Kp=0.178、Ki=0.01、Kd=0;模糊控制参数设置为Ke=1、Kde=0.2、Ku=0.92。观察控制效果。
(4)在1 000~1 500r/min范围内,改变期望转速为1 500r/min,记录控制曲线,计算控制系统输出曲线的性能指标。
(5)实验结果分析。
5 结束语
基于ELVISⅡ的虚拟仪器教学实验平台可以实现实验的操作及数据分析,功能强大。通过具体的实验设计、操作,能使学生对测控系统、自动控制原理理论知识、控制器设计有一个比较全面的认识及掌握,充分激发学生学习理论知识的积极性。
本文基于ELVISⅡ虚拟仪器平台和直流电机模块设计了直流电机速度控制实验系统,在此平台上,进行了模糊PID控制器的设计,取得了较好的控制效果,验证了在此平台上进行自主实验的可行性。
(References)
[1]孙斌,赵玉晓,张新娜.基于虚拟仪器的自控原理实验教学软件开发[J].实验技术与管理,2012,29(5):105-108.
[2]尤丽华,周洋.基于虚拟仪器的测试技术实验教学系统建立[J].实验技术与管理,2011,28(2):83-86.
[3]荣雅君,刘琳,高广峰,等.虚拟仪器在实验教学中的应用[J].电力系统及其自动化学报,2009,21(1):78-82.
[4]余金华.基于虚拟仪器技术的实验教学研究[J].安徽工业大学学报,2009(11):123-124.
[5]宋玉杰.基于NI ELVIS的远程虚拟实验室的研究[J].电子设计工程,2009(1):34-38.
[6]徐苒,金暄宏,戴曙光.基于NI ELVISⅡ的温度采集系统设计[J].仪表技术,2010(2):33-35.
[7]周求湛.基于NI ELVIS的网络化实验教学平台[J].实验室研究与探索,2012,31(5):154-157.
Study on Fuzzy-PID control experiment of DC motor module based on virtual instrument
Fei Hongzi,Fan Liyun,Fei Jingzhou,Liu You,Dong Quan,Yang Jialong
(College of Power and Energy Engineering,Harbin Engineering University,Harbin 150001,China)
DC motor speed control experiment using Fuzzy-PID control algorithm is designed based on the NIELVISⅡvirtual instrument.The control principle of the DC motor module is analyzed first,the PID controller and Fuzzy-PID controller are designed and applied in the system.The experimental data is analyzed through comparing two algorithms.DC motor control experiment for students is designed finally.The actual teaching results show that the students’interests in studying the control system design are inspired greatly by this experiment platform,and teaching quality could be improved further.
DC motor;Fuzzy-PID control;virtual instrument
TM33;TP273
A
1002-4956(2015)3-0081-04
2014-07-22 修改日期:2014-09-01
黑龙江省高等教育科学研究“十二五”规划课题(HGJXHB2110355);哈尔滨工程大学教育教学改革研究项目(JB2013YB11);哈尔滨工程大学能源与动力工程学院精品课程建设项目
费红姿(1970—),女,上海,博士,副教授,研究方向为动力装置控制与测试技术
E-mail:fhz@hrbeu.edu.cn
猜你喜欢
大电机技术(2022年5期)2022-11-17
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2016年9期)2016-02-27
电源技术(2015年11期)2015-08-22
