
基于下垂策略的微电网双模式运行控制
2015-06-23 16:21:26朱桃兰王倩黄付顺
电气开关 2015年2期
朱桃兰,王倩,黄付顺
(西南交通大学 电气工程学院,四川 成都 610031)
基于下垂策略的微电网双模式运行控制
朱桃兰,王倩,黄付顺
(西南交通大学 电气工程学院,四川 成都 610031)
微电网孤岛和并网模式切换时,为了减小对大电网和微电网造成的冲击,提出同步并网控制方法。在采用P-f和Q-V下垂控制策略的基础上,设计了同步并网控制流程。根据电网和微电网输出的电压进行同步调节,使得两者的电压幅值差、频率差和相角差满足并网要求,以实现微电网在孤岛和并网两者模式之间的平滑切换。最后,在Matlab/Simulink仿真软件中建立微电网运行控制模型。仿真结果表明,所提出的方法实现了微电网在两种模式之间的平滑切换和在双模式下的稳态运行。
微电网;下垂控制;同步并网控制;模式切换
1 引言
微电网是一个由负荷、微电源及储能装置在电网用户终端互联组成、能够实现自我控制、保护和管理的局部发配电系统[1-2],通过一个公共连接点(point of common coupling,PCC)与大电网相连。微网的控制策略决定其在并网和孤岛两种模式下的运行情况,并影响模式切换[3-4]。下垂控制法(Droop)是无联络信号线独立控制技术,只需要采集各逆变器的输出、依赖其内部控制策略,即可实现并联多逆变器的同步、均流运行。
当微网处于孤岛运行时,采用下垂控制保证了微网系统电压和频率的稳定,实现有功和无功功率的合理分配[5]。微电网采用下垂控制也能够实现输出电压与大电网同步,从而实现微网由孤岛向并网的无缝切换[6-10]。文献[7-8]同时考虑了电压幅值差和相角差的影响,利用PI控制实现了微电网电压幅值和相角同步。其中文献[7]只分析了单个DG采用下垂控制,而另一台DG采用PQ控制,无法验证下垂控制在多台DG间均分功率的特性。文献[9]提出先进行频率同步,在实现频率同步的基础上再进行相角同步,同步并网后微电网需要将DG的控制策略由下垂控制切换成电流控制模式。微电网工作在不同模式,DG内部控制策略也随之改变,会对微电网内部产生冲击。文献[10]只分析了由孤岛向并网切换时的系统稳定,没有分析由并网切换至孤岛时的系统稳定性以及下垂控制的有效性。
本文在上述工作基础上,提出微电网同步并网控制方法。为了避免电网和微电网的电压不同步引起冲击电流,采用同步并网控制器,设计同步的顺序流程,实现电压幅值、频率和相角与大电网同步。微电网模式切换时,不需要改变DG内部的控制策略,更易实现平滑并网。
2 微网结构
本文分析的微电网结构包含两台可控型微电源DG1和DG2,如图1所示。
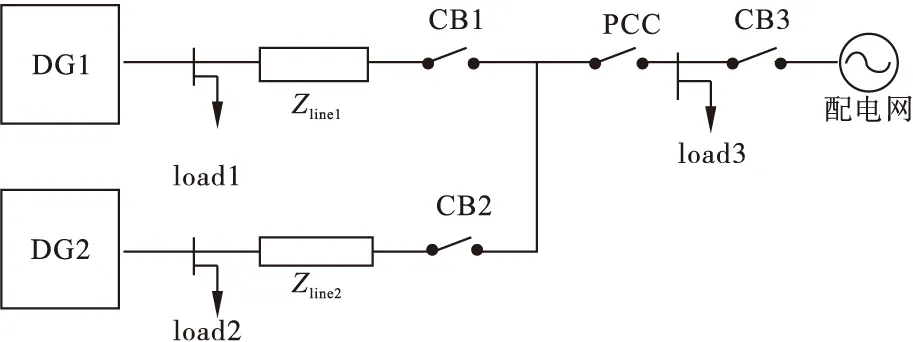
图1 微电网结构
DG1和DG2分别通过线路阻抗Zline1、Zline2并联运行,负荷1和负荷2分别为DG1和DG2的本地负荷,负载3为连接在公共母线上的负荷;微电网通过公共连接点PCC处的开关与公共电网并网,当并网开关闭合或断开时微电网分别工作在并网或孤岛模式下。当配电网出现故障或短时停电时,CB3断开,微电网孤岛运行并负责为公共母线上的负荷3供电。
3 DG结构和控制设计
假设直流侧电压基本恒定,微电源的等效电路结构如图2所示。其中Vdc表示等效的直流源。
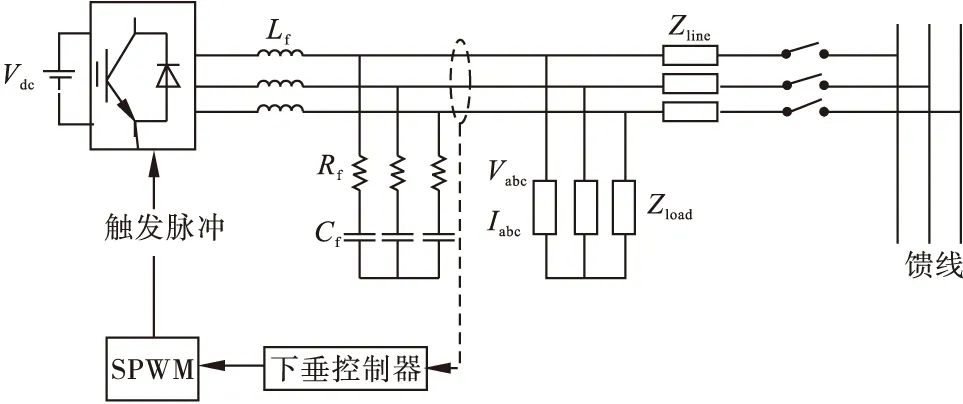
图2 DG控制电路
3.1 下垂控制原理分析
下垂控制通过模拟传统电网中的有功、频率特性曲线和无功、电压曲线,实现电压、频率的自动调节,并且无须借助于通信[11]。
逆变器的下垂控制式为:
(1)
式中:f和V分别为下垂特性计算后的频率和电压;P和Q为输出有功功率和无功功率;f0、V0分别为频率和电压的额定值;P0、Q0分别为额定有功功率和无功功率;m和n分别为有功功率和无功功率的下垂系数。
假设额定无功功率设置为0,根据式(1)可以得到图3所示下垂控制特性曲线。
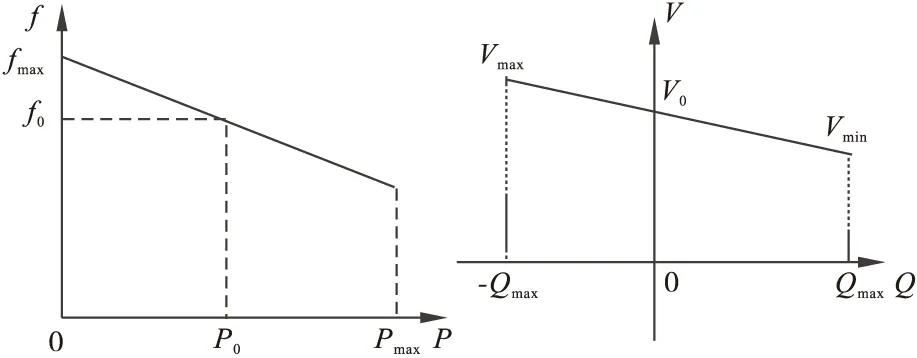
图3 P-f和Q-V下垂特性曲线
根据图3所示的下垂特性图,有功功率和无功功率的下垂系数m和n可以设置为[7]:
(2)
式中:Pman为DG允许输出的最大有功功率,fmax、fmin分别为系统允许最大和最小频率,Qmax为DG允许发出或吸收的最大无功功率,Vmax、Vmin分别为系统允许的最大和最小电压。
采用下垂控制,每台DG通过检测自身的输出有功功率和无功功率,自动调节自身输出电压的幅值、频率和相位,最终实现系统中各个模块单元间负载功率的分配,以达到功率的均分。
3.2 下垂控制器设计
水稻立枯病是水稻育苗期间发生普遍、危害严重的病害,轻者点片发生,重者毁床。由于病原菌种类,为害时期和发病环境不同,立枯病有芽腐、针腐、黄枯和青枯四种类型。最常见的是黄枯型和青枯型。黄枯多发生于二叶期前后,症状是早晨观察叶尖不吐水,以后萎蔫枯黄,心叶卷曲。初期茎基变褐,根毛稀少暗白,以后逐渐发锈变褐,茎基软化,拔取心叶时易与茎基部脱离。青枯属于生理性病害,多发生于三叶期前后。在低温、阴雨之后,天气骤睛、升温之时特别容易发病。主要病症是,病苗叶尖不吐水,心叶及上部叶片“打绺”呈针状,颜色青灰,最后整株枯萎致死。防治立枯病,必须预防为主,综合防治,打总体战。
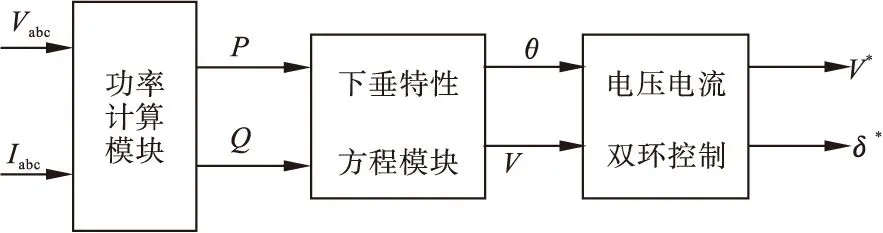
图4 下垂控制器结构框图
下垂控制器包括功率测量模块、下垂特性方程模块和电压电流双闭环控制模块[12-13]。本文设计的下垂控制器如图4所示。采集三相电压和三相电流信号,经过下垂控制器后形成SPWM调制信号,驱动IGBT的开断,从而实现对逆变器的控制。
根据式(1)可以得到下垂控制环,图5为下垂特性方程模块的模型。
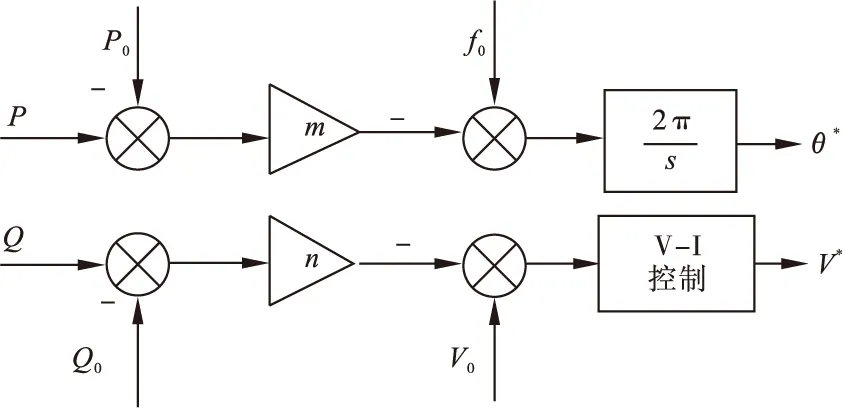
图5 下垂特性控制模块
4 并网同步模块
由下垂特性可知,当DG带负载工作在孤岛模式时,其输出电压的幅值和频率可能会偏离额定值,微电网输出的电压和电网输出的电压也会存在差异。当并网点两端的电压不同步,微电网与电网并网的瞬间将对电网造成冲击。所以,并网前必须使得并网点两端的电压幅值、频率和相角尽可能接近,以减小并网过程对电网造成的电流冲击以及微电网内部存在的暂态过程。只有当电压、频率和相角三者都满足并网时的同步参数限制时,微电网才能与大电网并网[14]。
微电网由孤岛模式向并网模式切换时,相角差对并网造成的影响最大,频率差其次,电压幅值差频率差其次,电压幅值差的影响最小。此外,相角差的影响要远远大于电压差和频率差对其造成的影响[15-16]。
4.1 同步并网控制流程设计
启动同步控制器后,电网和微电网输出的三相电压经过锁相器PLL,计算出两者的电压幅值、频率和相角。
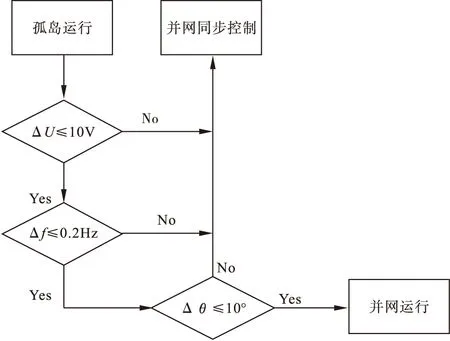
图6 同步并网控制流程图
本文根据上述电压差、频率差和相角差对并网的影响度,设计同步并网控制的顺序,实现微电网平滑并网。同步并网就是对微电网和大电网的电压幅值、频率和相角进行检测,并将压差、频差和角差控制在规定的范围内。只有当三个同步条件都满足并网条件的时刻,才能闭合并网开关。根据IEEE 1547标准[17]和本文分析的微电网容量情况,设计图6所示同步并网控制流程图。
4.2 电压、频率和相角同步
同步并网控制中,DG的电压和频率的PI同步控制式为:
(3)
(4)
式中:Ug、fg表示大电网的电压幅值、频率;Upcc、fpcc表示微电网的公共连接点PCC端的电压幅值、频率。同步控制时,将Δfsyn、ΔUsyn分别叠加下垂控制式(1)中的频率和电压参考值f0、V0上。
当频率不同步时,会导致相角差不停地变化。为了稳定相角差,必须先按照式(4)实现频率的同步。当频率稳定后,相角差就会固定。为了避免通过调节频率来消除相位差影响频率同步的结果,当频率同步完成后,断开频率同步的PI控制环,频率的补偿值变为:
(5)
(6)

5 仿真分析
为了验证上述理论的正确性,本文利用Matlab/Simulink仿真软件搭建了包含两台DG的微电网模型。本节的仿真中,DG1和DG2的本地负荷均为6000W,电网侧负荷包含有功负荷8000W和无功负荷2000Var。
5.1 微网由孤岛切换至并网运行
微电网运行于孤岛模式,启动并网同步控制器后,同步控制器根据电网和微电网公共连接处输出的电压进行同步控制调节。当电压幅值、频率和相角满足并网条件后,才闭合并网开关。图7为微电网由孤岛切换至并网运行的仿真情况。
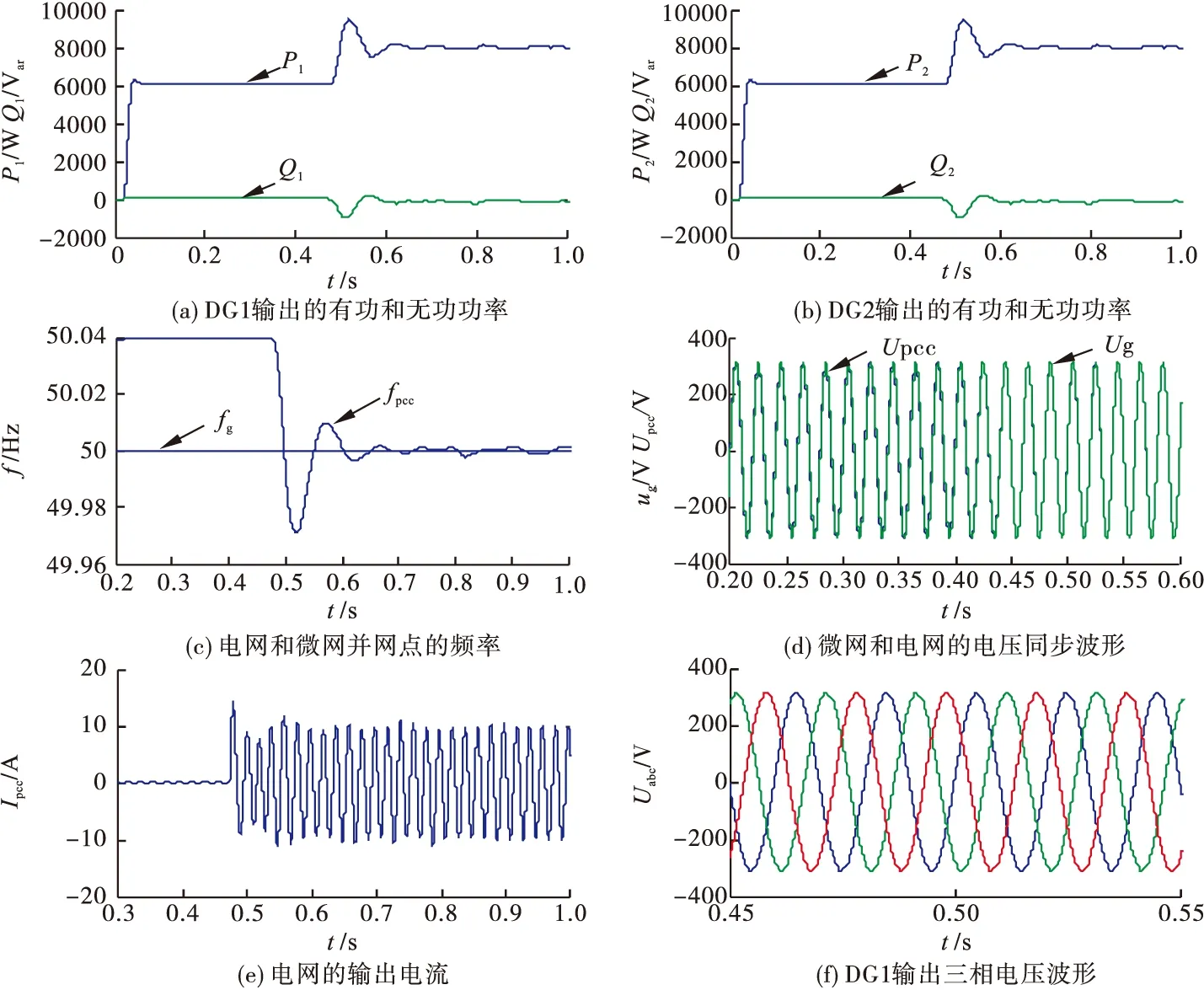
图7 微网由孤岛切换至并网过程的仿真波形
仿真波形可以看出,同步并网过程中微网电压和电网电压之间的相位差不断缩小,两者在0.47s左右实现完全同步,PCC处并网开关闭合信号置1,微网逆变器由孤岛模式转入并网模式运行。
DG1和DG2在孤岛时分别担负各自的本地负荷的供电,均输出6000W功率。微电网并网后,DG1和DG2按照各自的额定功率,输出8000W有功功率,其余缺额负荷功率均由大电网承担。运行模式切换瞬间,微网逆变器输出电压没有发生突变,也没有产生大的并网电流冲击,系统实现了由孤岛模式到并网模式的平滑切换。
5.2 微网由并网切换至孤岛运行
微电网在并网模式稳态运行后,当大电网发生故障短时停电时,微电网和大电网断开连接,形成孤岛运行。仿真设置在1s时,微电网与大电网断开。微电网进入非计划孤岛后,除了给本地负荷供电,还需要给公共端的负荷供电[18]。图8为微电网由并网切换至孤岛运行的仿真情况。
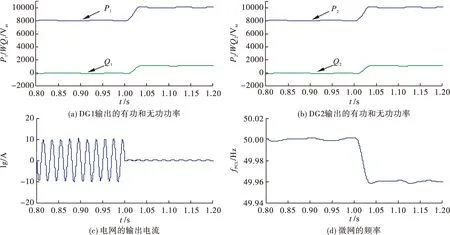
图8 微网由并网切换至孤岛过程的仿真波形
由图8的仿真波形可以看出,电网的侧的输出电流在1s之后变为0,表示微电网与大电网断开,进入孤岛运行模式。微网由并网模式切换到孤岛模式运行以后,失去了大电网的支撑,基于下垂控制的微网逆变器输出呈现电压源特性,继续支撑微网的运行。
微网进入孤岛模式运行后,DG1和DG2除了负担各自6000W的负荷外,还要均分公共母线上的负荷,每台DG平均分担4000W的有功负荷和1000Var的无功负荷。这验证了下垂控制功率均分的特性。此外,在并网运行时,微电网的频率和大电网的频率(50Hz)一致。进入孤岛运行,每台DG的输出功率大于其额定功率,由于下垂特性的作用,微网的频率降低为49.95 Hz。
6 结论
本文采用下垂控制策略,实现含多台DG的微网稳定运行。为了消除微网和电网的电压幅值差、频率差和相角差,本文根据三者对并网的影响度设计同步控制顺序,采用并网同步控制,实现了微电网由孤岛向并网的平滑切换。同样,本文的控制方法也适用于实现微网由并网向孤岛的平滑切换。通过仿真实验,结果表明该控制方法能够有效实现微电网在双模式下的运行,并且能够实现微电网在并网和孤岛两种模式之间的平滑切换,具有良好的动态和稳态特性。
[1] Lasseter.Microgrids[A].In:IEEE Power Engineering Society Winter Meeting,New York[C]. USA,2001,l:146-149.
[2] Sanchez M.Overview of microgrid research and development activities in the EU[A].In:Montrealsym Posiumon Microgrids[C].2006,l:355-361.
[3] 欧阳翚,牛铭.基于不同控制策略的微网仿真[J].电网与清洁能源,2011,27(3):19-24.
[4] 刘龙舞,张捍东,董克龙.微网控制技术研究综述[J].电工电气,2012,(2):1-6.
[5] 张明锐,杜志超,黎娜,等.高压微网孤岛运行时频率稳定控制策略研究[J].中国电机工程学报,2012,32(25):20-26.
[6] 李培强,刘志勇,李欣然,等.应用综合控制策略的微电网建模与仿真[J].高电压技术,2011,37(10):2356-2362.
[7] 张纯.微网双模式运行的控制策略研究[D].重庆:重庆大学,2011.
[8] 王成山,高菲,李鹏,等.低压微网控制策略研究[J].中国电机工程学报,2012,32(25):2-8.
[9] Jin Cheng,Gao Mingzhi,Lv Xiaofeng,et al. A Seamless Transfer Strategy of Islanded and Grid-connected Mode Switching for Microgrid based on Droop Control[A].In:IEEE Energy Conversion Congress and Exposition[C].2012:969-973.
[10] Tine L. Vandoorn,Bart Meersman,Jeroen D. M. De Kooning,et al. Transition From Islanded to Grid-Connected Mode of Microgrids With Voltage-Based Droop Control[J].IEEE Transactions on Power Systems,2013,28(3):2545-2553.
[11] 牟晓春,毕大强,任先文.低压微网综合控制策略设计[J].电力系统自动化,2010,19(34):91-96.
[12] 黄小荣,陈鸣,陈方林.微网运行模式及控制策略研究[J].华东电力,2012,40(5):798-801.
[13] 王成山,肖朝霞,王守相.微网综合控制与分析[J].电力系统自动化,2008,32(7):98-103.
[14] 杨志淳,乐健,刘开培,等.微电网并网标准研究[J].电力系统保护与控制,2012,40(2):66-71.
[15] 王先为,卓放,杨美娟.交直流微网PCC无缝切换控制策略研究[J].电力电子技术,2012,46(8):1-3.
[16] 李兴旺,郑竞宏,刘鹏飞,等.微电网带负荷并网的平滑切换条件及控制策略[J].黑龙江电力,2012,34(1):62-65.
[17] Standard Coordinate Committee 21.IEEE 1547 IEEE standard for interconnecting distributed resources with electric power systems[R].New York:Institute of Electrical and Electronics Engineers,Inc,2003.
[18] 张中锋.微网逆变器的下垂控制策略研究[D].南京:南京航天航空大学,2013.
Micro-grid Dual Mode Operating Control Based on Drooped Strategy
ZHUTao-lan,WANGQian,HUANGFu-shun
(College of Electrical Engineering,Southwest Jiaotong University,Chengdu 610000,China)
In order to reduce the impact on grid and micro-grid when the micro-grid changes operating mode,a synchronization control strategy is proposed.The droop control based on P-f and Q-v characteristics is applied,and a synchronization control process is designed.To enable a smooth transition between the island and grid-connected mode of micro-grid,this paper makes the voltage magnitude difference,frequency difference and phase angle difference between grid and micro-grid to meet the grid-connecting requirements by adjusting their output voltage.Finally,an operation and control mode is established in Matlab/Simulink simulation software.Simulation results show that a smooth switching between two modes and a steady operation in dual-mode are realized by the proposed method.
micro-grid;drooped control;grid-connecting synchronization control;mode transition
1004-289X(2015)02-0031-05
TM72
B
2014-03-14
朱桃兰(1990-),女,硕士研究生,研究方向:微电网运行与控制; 王倩(1962-),女,教授,硕士生导师,研究方向:电力系统调度自动化; 黄付顺(1990-),男,硕士研究生,研究方向:分布式电源运行优化。
猜你喜欢
电工技术学报(2021年9期)2021-05-12 06:33:40
新世纪智能(语文备考)(2020年9期)2020-12-31 09:24:02
新高考(英语进阶)(2018年1期)2018-04-18 13:59:51
电子制作(2018年1期)2018-04-04 01:48:40
创新作文(小学版)(2017年33期)2017-04-04 02:02:14
西安工程大学学报(2016年2期)2016-06-05 12:25:17
通信电源技术(2016年6期)2016-04-20 06:21:15
电测与仪表(2016年6期)2016-04-11 12:06:14
电测与仪表(2015年16期)2015-04-12 00:44:34
中国卫生(2014年7期)2014-11-10 02:33:06
