
高速动车组牵引传动控制系统仿真研究
2015-06-21 10:50:54朱琴跃陈江斌成林坤周云光
城市轨道交通研究 2015年2期
朱琴跃 陈江斌 成林坤 周云光
(同济大学电子与信息工程学院,201804,上海∥第一作者,副教授)
CRH380A型动车组是在CRH2C型电力动车组基础上自主研发的新型动车组。相比于其它CRH系列动车组,CRH380A的持续运行速度可达380 km/h,运行速度得到了很大的提升。为保证动车组高速、稳定、安全地运行,必须采用先进、成熟的牵引传动系统以及更为合理的牵引传动控制策略。但我国在高性能牵引传动系统上的研发能力较为欠缺,许多关键部件依旧需要从国外进口,重要技术也依旧依赖国外的技术支持。因此,要发展高性能、具备完全自主知识产权的高速动车组需对其牵引传动系统及控制策略作深入研究。基于此,本文以CRH380A型动车组为研究对象,对牵引传动系统工作原理和控制策略进行分析和建模,探讨仿真模型在不同工况下的运行特性并获得相应结论,为牵引传动系统中关键部件及核心技术的国产化研究和优化设计提供技术参考。
1 牵引传动系统主电路基本工作原理
CRH380A型动车组牵引传动系统主要由变压器、四象限脉冲整流器、中间直流环节、牵引逆变器和异步电机等组成,其系统能量流动如图1所示。牵引工况下,受电弓将接触网的AC 25 kV输送给牵引变压器,降压后输出1 500 V单相工频交流电供给脉冲整流器,整流输出的DC 2 600~3 000 V直流电经中间直流环节处理后作为牵引逆变器的输入,逆变后输出电压0~2 300 V、频率0~220 Hz可控的三相交流电供给异步电动机;再生制动工况下,电机处于发电机状态,电流经逆变器续流二极管整流,再由四象限脉冲整流器转换为交流电回馈给电网,实现能量的回馈。
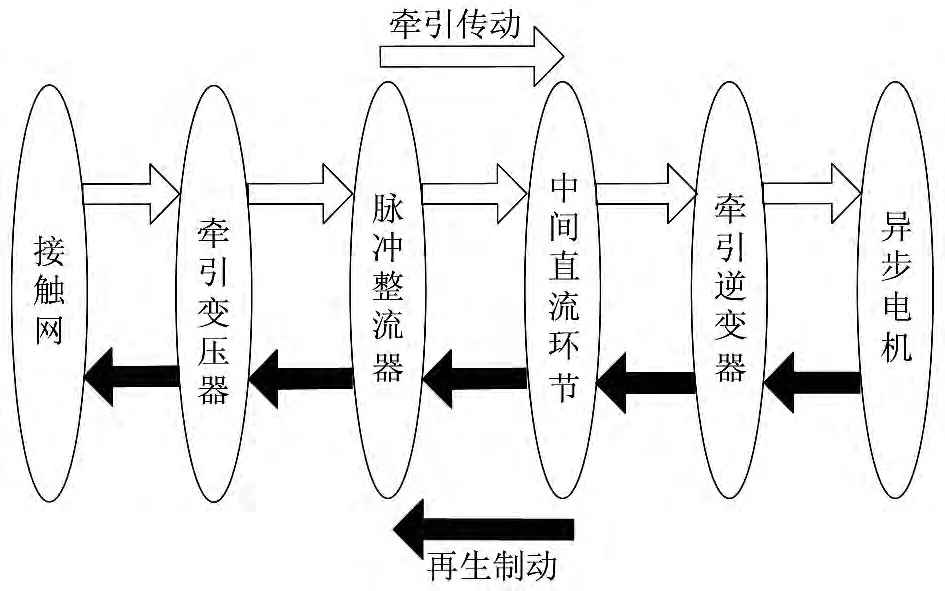
图1 动车组牵引传动系统能量流动图
1.1 牵引变流器工作原理
牵引变流器作为动车组完成电能转换和传递的关键部件,其性能好坏直接关系到动车组能否安全可靠运行。牵引变流器主要由四象限脉冲整流器、中间直流环节和三电平逆变器构成。其中整流和逆变均采用三电平二极管箝位型结构,每相由4个反并联续流二极管的开关管和2个箝位二极管构成。
(1)瞬态电流控制方法。CRH380A型动车组脉冲整流器采用瞬态电流控制方法。该方法为电压和电流双闭环控制,即无论任何环节的参数发生变化,系统都能够自动调节其参数,使输出的直流电压保持稳定,动态响应快,因此非常适用于动车组整流器等大功率电力电子模块[1-2]。
(2)空间矢量 PWM(脉宽调制)控制[3-4]。空间矢量PWM控制(SVPWM)的直流电压利用率要比SPWM(正弦波脉宽调制)高15%,且输出转矩脉动较小。目前CRH380A型动车组的三电平逆变器就采用该调制方式。三电平SVPWM和两电平的调制原理相似,主要包括如下几个步骤:判断参考矢量所在扇区,根据最近三矢量原则确定输出矢量,计算各矢量作用时间,优化输出矢量的开关顺序。
1.2 转子磁场定向间接矢量控制原理
CRH380A型动车组采用转子磁场定向间接矢量控制系统实现对牵引逆变器和异步电机的控制[5-7]。控制系统主要由同步旋转坐标系(MT坐标系)下的异步电机模型、三电平SVPWM逆变器及其它反馈环节组成。矢量控制系统采用的旋转坐标系的M轴与转子磁场方向一致,即按转子磁场定向。
2 牵引传动控制系统
CRH380A 型动车组牵引传动控制系统[8-9]主要包括磁通和转矩计算模块、恒速控制模块和转子磁场定向控制模块,其框图如图2所示。
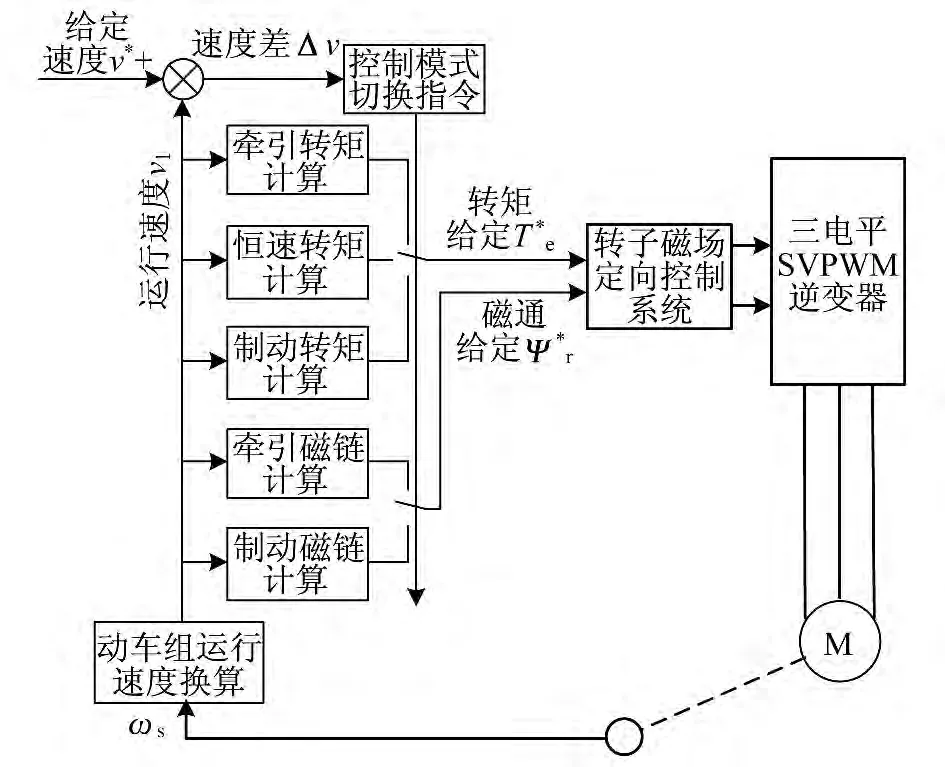
图2 牵引传动控制系统框图
2.1 磁通计算模块
CRH380A型动车组转子磁通与运行速度v的关系如下式所示:

2.2 转矩计算模块
动车组牵引、再生制动力的计算是确定牵引工况、再生工况下异步电机转矩的基本前提。由CRH380A型动车组牵引特性曲线可知,当运行速度v≤154 km/h时,牵引力基本保持不变;而当v>154 km/h时,牵引力与速度呈反比(恒功率)。采用线性插值法可得动车组牵引力与运行速度的数学关系如下。
当0<v≤154 km/h时:
当154 km/h<v≤377 km/h时:

则异步电机牵引转矩给定指令为:

此外,CRH380A 型动车组运行阻力为[10-11]:

因此,由式(2)和(3)可得每台异步电机的负载转矩为:

以上式中:定员时车辆计算质量m=442 t,齿轮传动比 μc=2.379,齿轮传动效率 ηGear=0.95,轮径d=0.82 m,牵引电机总台数N=6×4=24。
根据CRH380A型动车组的再生制动曲线可知,当运行速度v<70 km/h时,再生制动力呈现恒定力矩特性;而当v>70 km/h时,随着速度上升再生制动力缓慢下降。故采用线性插值法可得每节动车再生制动力与运行速度的数学关系式如下。
当15 km/h<v≤70 km/h时:
Fzd=35.800 kN
当70 km/h<v≤294 km/h时:
Fzd=[35.800 - 0.032(v - 70)](kN)
当294 km/h<v≤350 km/h时:
Fzd=[28.700 - 0.107(v - 294)](kN)
2.3 恒速控制模块
恒速控制模块主要实现2个功能:①实现牵引、制动、惰行等多种工况间的平稳切换,以防止不同工况切换时引起较大的转矩和电流波动;②避免动车组启动时过大的电流电压冲击。为此,CRH380A动车组采用图3所示的恒速控制策略[12]:当速度差Δv>6 km/h时,控制系统进入牵引模式;当-6 km/h<Δv<6 km/h时,系统进入恒速控制模式;当 Δv<-6 km/h时,系统进入再生制动模式。恒速控制模块各个阶段给定转矩、运行状态如表1所示。
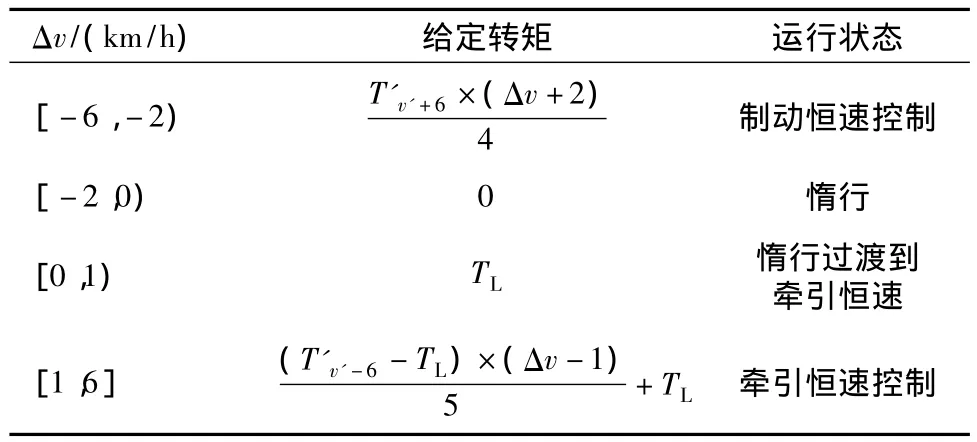
表1 恒速控制各阶段转矩给定及运行状态表
3 不同工况下牵引传动控制系统仿真研究
为了分析CRH380A型动车组在不同工况下的牵引传动特性,本文根据上述牵引传动系统控制方法的讨论分析,构建了MATLAB仿真模型。
根据表2所示的仿真参数,配置各个模块。经过仿真调试,对不同工况下系统输出转矩、直流环节的电压变化以及定子电流的波形进行分析。经测算,仿真时间∶实际时间 =1∶200。
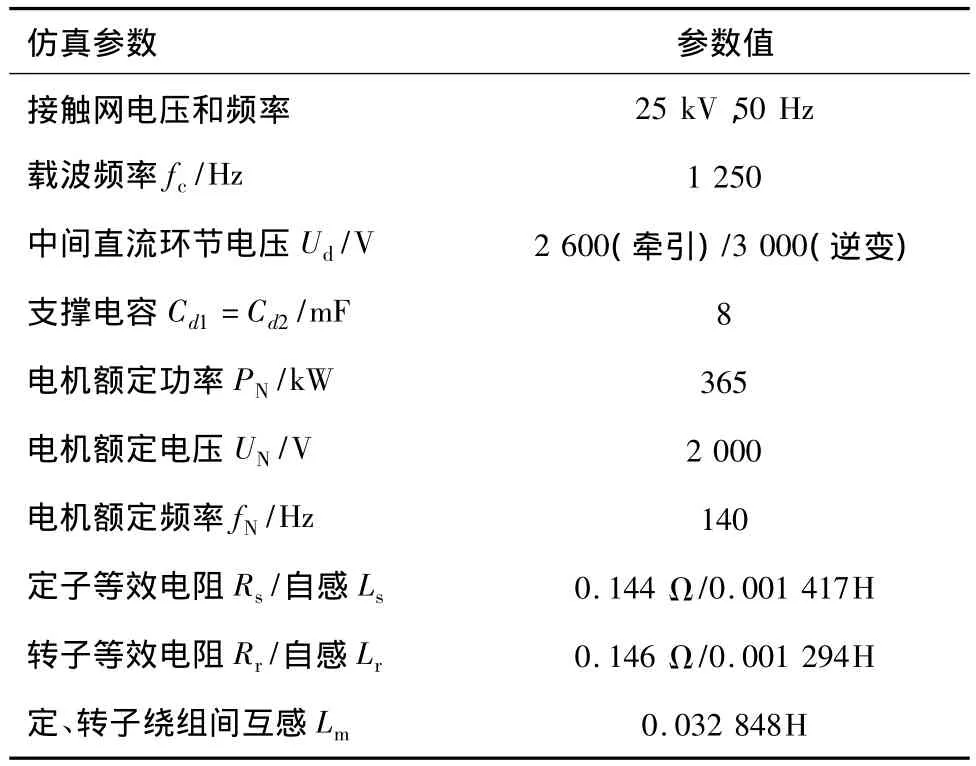
表2 系统仿真参数
3.1 牵引工况下的仿真分析
牵引工况下牵引传动系统仿真波形如图4所示。在牵引工况下,设定动车组由静止启动加速至给定速度300 km/h,如图4a)所示。仿真运行时动车组按照实际的启动加速度0.42 m/s2加速,随着运行速度的提高,加速度减小;达到300 km/h时,剩余加速度约为0.27 m/s2。由图4b)所示的异步电机输出转矩波形可知:系统启动后,随着加速度增加,输出转矩增大且有较大波动;当运行速度较大时,加速度减小,输出转矩减小;当仿真运行1.3 s左右时,动车组运行速度和异步电机输出转矩都达到稳定。同时,当异步电机启动时,其a相定子电流较大,而当动车组运行稳定后,定子电流也趋于稳定,如图4c)所示。
3.2 再生制动工况下的仿真分析
再生制动工况下牵引传动系统仿真波形如图5所示。假设动车组运行速度曲线如图5a)所示,即由启动、加速并稳定运行至300 km/h,当仿真运行至1.5 s时实施制动,相应的异步电机输出转矩仿真波形如图5b)所示。由图5b)可知:动车组实施再生制动时,异步电机反转,输出转矩不断增加;当动车组仿真运行达2.8 s时运行速度降为0,此时电机输出转矩为0。同时,再生制动工况下异步电机的a相定子电流波形如图5c)所示。

图4 牵引工况下牵引传动系统仿真波形
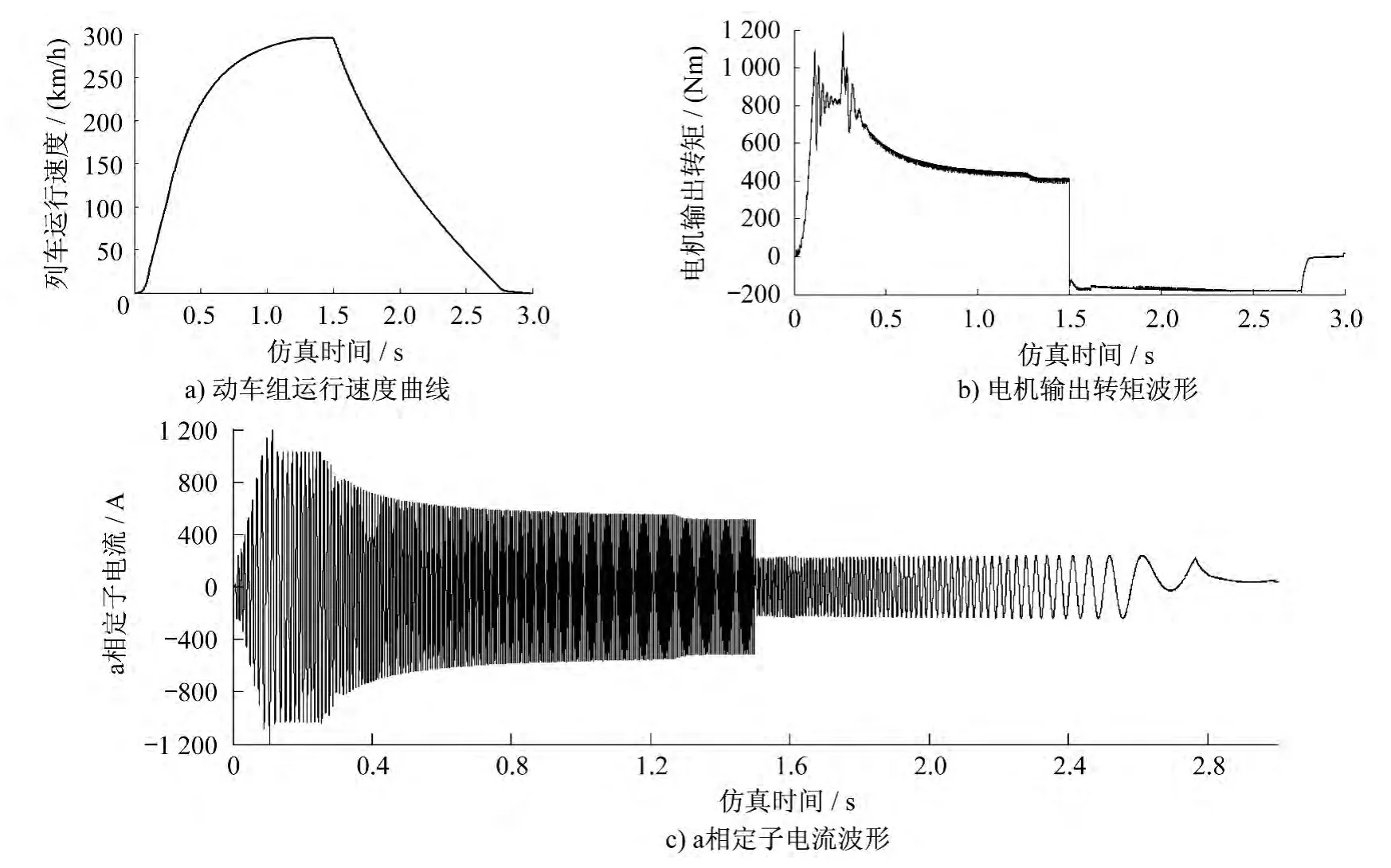
图5 再生制动工况下牵引传动系统仿真波形
3.3 不同运行速度下的仿真分析
不同运行速度下牵引传动系统仿真波形如图6所示。假设动车组按照图6a)所示速度变化曲线运行,即根据实际平均启动加速度0.38 m/s2加速至给定速度200 km/h,恒速运行1s时实施制动,0.2 s后再减速至150 km/h;在此基础上再恒速运行至仿真时间1.5 s时,以加速度0.38 m/s2开始加速,且加速度不断减小,并在仿真时间2.5 s时动车组加速至300 km/h;当运行至仿真时间3s时动车组开始制动直至完全停止。该过程主要模拟了动车组在4.5 s内经历了两段牵引加速、两段制动减速和三段恒速的仿真运行,由此而得的电机输出转矩如图6b)所示。

图6 不同运行速度下牵引传动系统仿真波形
由图6可以看出,异步电机的输出转矩在牵引、再生制动和恒速等不同工况切换时稳定,能够较好地跟随给定值变化。仿真结果表明,本文所搭建的CRH380A型动车组牵引传动系统模型能够实现动车组在不同运行工况间的稳定切换,且验证了恒速控制模块的有效性和可靠性。
4 结语
本文详细分析了牵引传动系统各个环节的工作原理及其控制策略,基于Matlab/Simulink软件对CRH380A型动车组牵引传动系统进行了仿真建模,并分析了动车组在牵引、再生制动以及不同运行速度等工况下牵引传动系统的电机输出转矩和定子相电流。仿真结果表明,本文所搭建的模型能够实现动车组的稳定运行以及在各个工况间的平滑切换。本文的研究成果将对发展我国具备完全自主知识产权的高速动车组提供理论参考。
[1]Kazmierkowski M P,Malesani L.Current control techniques for three- phase voltage source PWM converter:a survey[J].IEEE Trans IE,1998,45(5):691.
[2]郑俊,冯晓云,谢望玉,等.单相PWM整流器瞬态电流控制策略的研究[J].电力电子技术,2009,12(2):2.
[3]Jae Hyeong Seo,Chang Ho Choi,Dong Seok Hyun.A new simplified space vector PWM method for three level inverters[J].IEEE Trans on Power Electronics,2001,16(4):545.
[4]李国丽,夏秋实,胡存刚,等.三电平NPC逆变器SVPWM方法研究[J].电气传动,2007(12):31.
[5]任晋旗,葛琼璇,李耀华.CRH2型动车组牵引系统电机控制策略研究[J].铁道机车车辆,2008,28(12):1.
[6]宋建国,张承宁,袁学.基于电压型逆变器转子磁场定向的感应电机控制器建模与仿真[J].电气传动,2004(2):16.
[7]阮毅,张晓华.异步电机磁场定向模型及其控制策略[J].电气传动,2002(3):3.
[8]王利军,李伟东,张峻领,等.高速动车组再生制动控制系统的研究与仿真[J].铁道工程学报,2012(6):78.
[9]邓学寿.CRH2型200 km/h动车组牵引传动系统[J].机车电传动,2008(4):1.
[10]彭俊彬.动车组牵引与制动[M].北京:中国铁道出版社,2009.
[11]王凤臣,任良抒,丁菊霞.电力机车牵引计算[M].成都:西南交通大学出版社,2010.
[12]李官军,冯晓云,王利军,等.高速动车组恒速控制策略的研究与仿真[J].机车电传动,2007(5):12.
猜你喜欢
中国造纸(2022年8期)2022-11-24 09:43:38
一重技术(2021年5期)2022-01-18 05:42:12
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
电子制作(2018年10期)2018-08-04 03:24:26
装备制造技术(2017年6期)2017-07-31 20:40:48
实验技术与管理(2014年9期)2014-03-11 18:37:40
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:10
振动、测试与诊断(2014年4期)2014-03-01 01:14:00
西安工程大学学报(2014年2期)2014-02-28 18:03:00
