
隧道检测中运动式激光扫描数据的处理和应用方法*
2015-06-21 10:50:52李新民周民立
城市轨道交通研究 2015年2期
李新民 周民立
(上海工程技术大学城市轨道交通学院,201600,上海∥第一作者,硕士研究生)
三维(3D)激光扫描技术的特点是:激光射线细微、能量集中、是可见光、波程精确可计、对反射物分辨清晰、对实物外形可精确复制、对光照无要求、数据采集分辨率高和采集速率快。结合全站仪、全景摄像和数字建模等其它技术手段,可以对城市轨道交通隧道区域的建筑空间进行测形、测量或对感兴趣的建筑表面进行分析。但是一般激光扫描仪都是独立的机电系统,在应用时需要将扫描设备搁置在三脚架上,放在特定位置对周围环境进行扫描。对于长距离轨道交通线路环境,需要分段扫描;在相邻扫描区段设置参考标靶,然后对分段扫描后数据再进行拼接处理,自动化程度低,对现场工作人员的操作经验和线下的数据拼接技术都有较高的要求。根据前期的研究成果[1],在解决了移动承载平台、传感定位方法和同步检测系统的关键技术后,本文的研究团队已经成功地完成了运动式移动激光扫描数据采集系统的研制,在移动平台上进行激光扫描数据采集,同样获得了完整的3D空间数据,而且大大提高了数据采集效率。本文结合上海轨道交通1号线上海南站站至莘庄站区段地下隧道的运动式激光扫描数据采集试验,总结了采集的后数据处理方法和应用方法。
1 系统组成及工作流程
运动式激光扫描的空间数据采集、数据处理和数据应用工作流程如图1所示。已经研制的数据采集系统是由移动平台、承载在平台上设置成2D工作模式的激光扫描仪和安装在平台轮轴上的传感器等硬件组成。采用的关键技术方法是在平台移动时对隧道切面{X,Z}进行空间数据采集,记录下扫描进程与平台实时位置的关系,生成同步文件供重建轨道伸展方向Y轴使用。采集后数据的处理是根据同步文件中的信息来分析平台移动轨迹,确定相应Y轴线状走向,并推导出对采集后空间数据的转换公式,以便生成完整的3D隧道空间数据。数据处理还包括对扫描仪输出空间数据特殊格式转换为通用格式(或者应用SDK编写程序读取数据)、对数据缺失性的质量评估,以及对数据统计特征的分析。
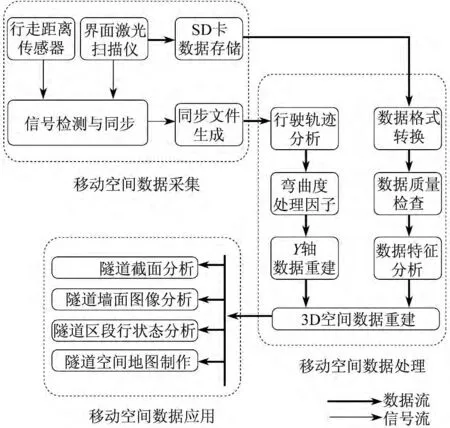
图1 运动激光扫描数据系统的工作流程
现场试验使用的是德国法如公司的Focus 3D扫描仪[2],在设置成2D切面扫描模式时在扫描圆周线上的分辨率可选为 1/32、1/16、1/8、1/4、1/2 和1六级,分别对应在一个半圆周上的扫描点数为543、1068、2134、4268、8534、17068。空间数据序列的表示方法是:每1个扫描圆圈由左右2列(column)组成,每1扫描圆圈上的数据点由行(row)来表示。试验使用的是一段35 m长,扫描分辨率 1/4,质量 4x,总共 2 500扫描圈(5 000 columns)的拱形隧道截面数据。
2 采集后数据处理方法
2.1 平台移动距离估算
当平台直线行走时,通过对车载位置检测可以得到2D点云数据所缺失的在Y坐标轴上的数值,并建立隧道切面空间点云数据与所在Y轴方向位置数据的关联。在理论上这种数据关联是严格实时同步的,需要通过CAM(通信协议)等通信方式将位置信息以标签方式实时贴入动态扫描数据的属性中。试验中考虑到扫描点空间轨迹虽然是螺旋形状,但是平台移动速度慢和扫描镜头转速快,可假设3D数字空间由许多数字切面相邻组成,且相邻切面之间距离均等,于是扫描数据点在Y轴向上的位置就是数据点所在切面在Y轴上的位置。可以将每个扫描切面当前序列号与移动平台实时位置相互关联,并建立同步文件供线下数据的重建。现有编码器每旋转一圈均匀输出1 024个TTL(晶体芯-晶体芯逻辑电平)个脉冲及每个脉冲在t时刻的正反向标志Kt(=1前走;=-1倒退)。若轮子半径为R,可计算移动平台当前行走的距离:

式中i=1,2,分别表示左右轮。由此可估算任意时刻移动平台在Y轴上的位置以及建立与扫描数据的关联同步。这种以切面线来近似螺旋线导致的数据误差,与激光扫描镜头旋转速度和平台移动速度有关,主要可以通过控制平台移动速度来调整。这种方法的优点是简单,可以仅使用一个编码器,将输出信息经简单变换为在Y轴上的位移轨迹。考虑到现场轨道线路的缓直度大,又是对局部隧道进行分析,在试验数据处理时采用的就是以上对于直线轨道线路的切面近似方法。
2.2 弯轨移动轨迹估算
在线路弯道时平台的实际移动轨迹就不是在直线Y轴上移动,而是在{X,Y}矢量平面上移动。已研制的数据采集移动平台在前端一根轮轴两端分别安装一个编码器,通过对2个编码器输出脉冲的分析计算,来估算移动平台在{X,Y}平面上的轨迹曲线,然后再对{X,Z}数据的空间坐标值变换。已经研究的2种算法有[1]近似截面形扫描算法和实际螺旋形扫描算法。前者类似于本文2.1节中的方法,只是相邻切面间距不等,特点是计算量较小、近似误差随平台移动速度而变;后者在任何移动速度时对扫描点空间位置的估算误差小,但是计算量较大。以上方法能够在重建的3D空间数据中表示出实际隧道弯曲度,特别适用于在制作隧道数字空间地图方面的应用。
2.3 3D点云数据重建
应用VC++.NET编程,将运动扫描获取的{X,Z}空间数据与生成的{Y}数据融合,重建为3D点云数据{X,Y,Z}。试验中采用的是人力移动平台,行走距离为35 m,扫描圈数为2 500,移动速度在1 km/h左右,对数据采用直线近似切面形扫描算法完成重建。图2是将重建后3D点云数据导入到法如公司SCENE软件中生成的图像示意。
2.4 数据质量检查
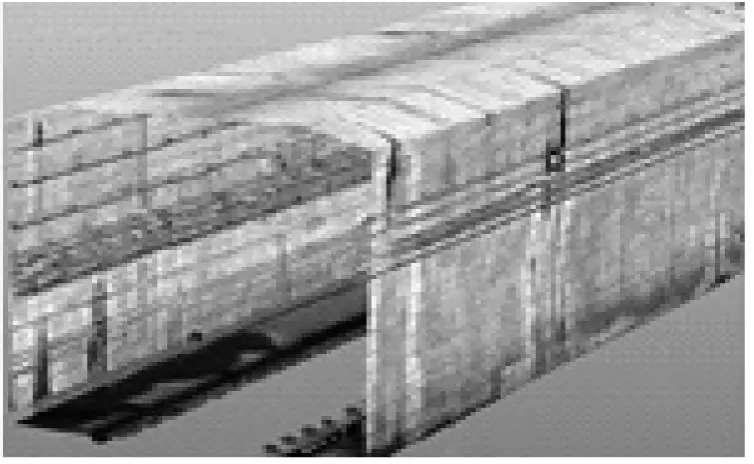
图2 移动扫描3D点云空间图
数据质量指激光扫描仪采集数据的完整性。由于激光扫描仪在数据采集过程中扫描射线的位置可能产生漂移、激光射线收发同步控制可能有随机偏差等多种原因,理论上规定接收到的扫描点数可能会缺失。在试验中对扫描数据质量检查的方法是:①以列(column)为参数变化,检查在该列截面上所有行数据和的丢失率;②是以行(row)为参数变化,检查在这一行上所有列数据和的丢失率;③是求采集任务的总的数据丢失率。试验中应用以上3种方法对数据质量进行了检查,结果说明:激光扫描仪在起始工作10 ms内的数据丢失率较大,在采集结束指令发送之后通常还会接收到一些额外的数据;大多数丢失的数据都是发生在+Z轴附近的row0—row7,而这个区域正是数据结构中序号开始的区域;数据整体丢失率小于2%。
2.5 数字特征分析
数据数字特征主要指在特定扫描切面上所有数据点的最大值、最小值、平均值和方差等统计特征,可用于对隧道截面形状的大致评估。数字特征的坐标原点,是以安装在移动平台上的扫描仪中心离轨道平面的高度,和以轨距1/2为中心点位置来确定的。数字特征还可应用到对同步数据的分析,移动平台行走时的速度不均匀,就会有相邻切面间隔值的数字特征表现。平台移动速度的控制主要取决于应用精度要求与数据采集和计算成本之间多因素的综合。应用到隧道截面分析的平台移动速度可以稍快些,试验中控制在3~5 km/h。应用到隧道墙分析的移动速度需要慢些,试验中宜控制在1 km/h左右。试验还发现相对于电动平台,人工平台对速度控制比较困难,速度方差较大,对数据精度的一致性有一定影响。
3 3D点云数据应用
隧道空间数据可以应用到对隧道工务维护管理和对隧道数字地图制作等许多领域。以下总结了在隧道截面分析和湿渍检测方面的试验情况。
3.1 隧道截面形状分析
对隧道切面的激光扫描数据建模后自动生成截面图[3],可用于车载的或线下的轨道线路限界检测处理。图3是从试验数据中取出的扫描行程在7.2 m时第600圈上的点云数据,近似作为相应的隧道截面数据,在软件Matlab屏幕上显示。可见隧道基本形状是拱形,可大概识别出关于顶部受电弓、二侧电力与通信电缆以及轨道等物体的反射点。图中座标原点(0,0)是激光扫描镜头的中点,X1和X2分别是在同一Z高度和在X方向从原点到左右二边墙面的长度。区段截面分析是对多个相邻单截面集成的分析,可以进一步获知隧道的建筑形状及其参数变化,以及识别设备安装位置,生成的工作报告内含信息更为丰富。

图3 截面形状显示与参数分析
3.2 隧道墙面湿渍分析
3.2.1 平面展开
图4为试验中采用的第一种方法对采集数据中前1 000圈数据展开的平面示意图。

图4 展开的二维平面图
将3D空间点云数据展开为2D平面数据,可方便用于对墙面灾害的图像分析。基本原理是对每一个扫描切面,将所有相邻扫描点连接后的空间弧长都序映射到X方向的直线上。一种方法是由平面几何原理,将相邻空间数据点的极坐标曲率半径r(m)与r(m-1)之间的夹角θ(m),乘以r(m-1)=,来近似夹角弧长L(m)。另一种方法是由空间几何原理,连接2个起始同一原点的空间矢量端点的第三个矢量长度可由L(m)=来近似。试验中采用的是第一种方法对采集数据中前1 000圈数据展开为平面的示意,这种方法在墙面崎岖不平时近似误差较大,但是计算量较小。
3.2.2 湿渍检测
已有研究说明,激光扫描仪反射值可以感知岩石表面的干湿程度[4]。试验所采用的激光扫描设备的反射数值分布在0~255(单位)的范围里,反射值大(小)说明扫描点反射率高(低)。以此原理,湿渍检测可以通过确定合适的反射阀值,并对数据二值化处理的方法来识别湿渍区域。对于新建或者运行年数不久的隧道,由于墙面底色比较干净,相应的识别结果比较准确。但是反射率可能是多个因素(如材料硬度、潮湿度和原污迹等)的综合作用结果,现场试验进一步说明,对运行年数较多的地铁隧道,由于季节性的渗水和干沽的轮回,墙面留下许多污水痕迹,激光扫描在这些区域的反射值与在真实湿渍区域的反射值二者之间很难区分。在实际工作中需要对数据采取必要的处理,包括对陈旧痕迹数据的滤波去除、对实际水迹湿渍的多阀值监测,并结合人工现场判别等多种相结合的方法。由于条件限制,试验中发现对陈旧隧道湿渍区域的算法识别还有待深入研究。
3.2.3 湿渍面积计算
图5是将阀值设为190对图4数据进行二进制数值化,并结合人工识别方法确定的湿渍区域(图中左下角2条黑色区域)平面图像以及参数报告。其中纵向Y表示轨道方向,横向X表示二墙面与顶面展开在同一平面上的方向。利用Matlab的Bwlabel和Regionprops等函数可计算出区域内的二值像素个数,并得到2条湿渍区域的总面积近似为1.439 7 m2。
4 结语
本文针对已经研制完成的运动式激光扫描系统,结合上海轨道交通1号线上海南站隧道的现场扫描试验,对数据处理及应用方法进行了研究与总结。数据处理方法包括:平台移动轨迹分析、Y轴数据重建、数据质量检查、数据数字特征分析、以及3D空间点云重建,这些处理工作对数据的正确应用是必须的和十分重要的。本文还总结了3D点云数据应用于隧道的截面形状分析和墙面湿渍检测与湿渍计算方面的试验结果,为运动激光扫描空间数据的进一步应用获得了宝贵的经验。
[1]周民立,李新民.基于运动激光扫描技术的铁路隧道建筑空间数据采集与处理系统[J].上海工程技术大学学报,2012,26(3):219.
[2]法如公司.法如激光扫描仪Focus 3D规范[EB/OL].(2013-03- 15)[2013 - 09 - 10].http://www.faroasia.com/laserscanner.
[3]肖清华,张继春.隧道断面自动成图的数学模型研究[J].铁道建筑,2006(9):29.
[4]宋姘,王晓琳,李洋,等.三维激光扫描技术与数码影像地质编录系统隧道围岩信息采集应用对比研究[J].隧道建设,2013,33(3):197.
猜你喜欢
小学生作文·小学低年级适用(2025年2期)2025-03-05 00:00:00
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
科学(2020年5期)2020-11-26 08:19:24
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
测绘科学与工程(2016年4期)2016-04-17 06:51:13
现代营销·经营版(2015年3期)2015-04-20 06:46:58
发明与创新(2015年30期)2015-02-27 10:39:52
测绘科学与工程(2014年2期)2014-02-27 07:05:49
现代营销·经营版(2013年5期)2013-05-14 14:55:04
警察技术(2013年1期)2013-03-20 14:11:22
