
600 MW超临界机组主汽温调节器参数优化设计
2015-06-15 18:59王文兰冯永祥
自动化仪表 2015年4期
苏 晨 王文兰 冯永祥
(内蒙古工业大学电力学院1,内蒙古 呼和浩特 010080;内蒙古工业大学信息学院2,内蒙古 呼和浩特 010080)
600 MW超临界机组主汽温调节器参数优化设计
苏 晨1王文兰1冯永祥2
(内蒙古工业大学电力学院1,内蒙古 呼和浩特 010080;内蒙古工业大学信息学院2,内蒙古 呼和浩特 010080)
针对火电厂主蒸汽温度系统大惯性、大迟延、非线性的特点,根据串级控制系统参数寻优的相关规则,以改进型单纯形法为基础,并结合Matlab软件对过热蒸汽参数进行优化。传统的Ziegler-Nichols参数整定法在PID控制设计中已经得到了普遍的应用,但是寻优过程过于繁琐,存在一定的局限性。将新的整定方法应用到超临界机组主汽温调节器参数优化设计中,与传统控制方法相比,该方法有效减小了系统的超调量,提高了系统的响应速度,并起到良好的控制效果。仿真结果表明,在控制算法不断发展的今天,单纯形法依然有着一定的优势与发展空间,有待继续研究。
PID调节器整定 改进型单纯形法 参数寻优 超临界 主汽温
0 引言
随着我国电力系统水平的不断提高,超临界机组渐渐成为了国内电力行业的主力。它具有技术含量高、环保能力强、发电机组煤耗量低等诸多优点,是现如今国际燃煤发电机组的重要发展方向。从我国的国情出发,发展超临界机组也符合中国未来大型锅炉的发展趋势。超临界机组运行参数较高,需要适应大范围调峰要求,这对超临界机组主汽温控制系统的相应设计提出了更高的要求[1]。我国在超临界机组的发展上正在紧跟世界的脚步,但在其控制技术方面还存在很大的差距。因此,需要对超临界机组的控制策略及其运行方式进行更加深入的讨论。
目前,传统PID控制技术是在过程控制中应用最为广泛的一种控制方法。从理论的角度上来说,PID控制系统无论设计或分析都已经形成了较为完善的体系。但PID控制系统一般需要进行多次试验,并根据理论分析和以往的经验修改其控制器参数。在实际的工程设计中,寻找PID参数时复杂且繁琐的整定过程对技术人员是一个挑战。
1 PID参数寻优方法
1.1 仿真模型的建立
控制系统动态模型通常用传递函数或者状态方程等加以描述,只有将系统的动态模型转换为仿真模型后才能对系统进行计算机仿真。在传统的仿真方法中,想要得到仿真模型,需要较深的理论知识和复杂的数学推导过程。在本文中,由于控制器的结构、形式已经确定,可以利用Matlab软件构造出Simulink仿真模型图。然后逐步对控制器的参数进行调整,使系统的性能在某种指标意义下达到最优。
1.2 目标函数
首先,进行参数寻优需要目标函数。目标函数主要分为两大类:一类是误差积分型目标函数,另一类是参考模型法目标函数。本文采用参考模型法确定目标函数。参考模型法需要建立一个理想的参考模型,这个模型应该满足给定的系统性能指标的一系列要求。将参考模型与系统的输入信号同时加到实际系统与参考模型上[3]。然后将参考模型的输出与实际系统的输出进行相应的分析和比较,通过调整系统的参数,尽可能减小它们之间的偏差。
本软件还提供其他不同的选项。例如,本软件中共有四种模型(IAE、ISE、ITAE、ITSE)供用户选择,均为误差积分型目标函数。
如果要抑制响应曲线的超调量δ%,可在图形界面主程序中选择抑制超调,并设置抑制常数k。由于共进行两次对调节器参数的优化,所以,在每次初始值下方可以分别抑制超调量。目标函数修改为:
Qnew=(δ%+k)Qerror
(1)
基于以往的仿真经验,按照由内到外的寻优规则,用户只需设置系统模型参数和优化参数的初始值。在点击“开始仿真”按钮后,软件会先优化出第一个控制器参数并将结果代入到第二个模型当中。然后对第二个控制器进行参数寻优。最后分别得出两个控制器的相应结果并显示在图形用户界面(graphic user interface,GUI)中。
1.3 寻优方法
PID参数寻优是对一个含有多变量函数的优化问题。多变量函数的优化方法有很多种,使用频率较高的是单纯形法以及改进型单纯形法[4]。
2 软件介绍
通过运用Matlab软件,并调用单纯形法程序和强大的寻优程序,对串级汽温控制系统的内外两个调节器同时进行参数寻优。这种方法不需要过多的经验就可以很快得出最优参数,以满足该系统的各项性能指标,从而达到设计要求[5]。此软件是一个自编仿真软件来实现控制效果,步骤如下。
① 用Simulink构造系统的结构图(*.mdl), 建立控制系统仿真模型。用户可以根据实际系统自行设定。
② 需要优化程序和仿真程序对Simulink函数进行调用。选用以改进型单纯形法为规则的寻优程序(simplex.m),对控制器进行参数寻优。系统仿真程序的功能是将有关数据送入仿真模型并计算目标的函数值。
③ 图形界面程序(main.m),建立GUI界面,获取数据,调用优化程序并显示结果。
综上所述,软件由图形界面程序GUI、改进型单纯形法程序、系统仿真程序(simulate,m)以及Simulink函数的仿真模型文件组成。使用前,需要将这些程序文件放入同一文件夹中。
打开Matlab软件,双击指定文件夹根目录下的main.m文件,即出现Matlab GUI主界面。
3 软件仿真实例
3.1 固定工况下
将本软件用于600 MW超临界机组100%工况下进行仿真研究。
串级控制系统方框图如图1所示。该系统有两个回路,即内回路和外回路。内回路由导前汽温变送器、执行器、副调节器、减温水调节阀以及减温器组成;外回路则由主汽温对象、主调节器、汽温变送器以及整个内回路组成。

图1 过热蒸汽串级控制系统框图
首先,根据图1所示过热蒸汽串级控制系统框图,给出600 MW超临界机组在100%工况下的导前区和惰性区的传递函数,分别为:
(2)
(3)
导前区和惰性区的调节器均选用PI调节器,执行机构和调节阀的传递函数分别为KZ=1、Kμ=1,测量变送器斜率为γθ1=γθ2=1。过热蒸汽串级系统Simulink模型如图2所示。
因为软件需要优先调节导前区参数,所以要将导前区所在的内环模型从过热蒸汽串级系统Simulink模型中提取出来,得到如图3所示的Simulink模型图。
然后,需要对图形用户界面(GUI)上的控制器初始参数进行设定,控制器的各项初始值均设定为1;目标函数设定为IAE误差积分型目标函数。仿真时间可根据需要适当增大。

图2 过热蒸汽串级系统Simulink模型
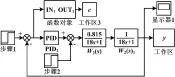
图3 导前区系统Simulink模型
点击开始仿真,经过近1 min后可以看出,经过30次搜索,得到的导前区参数寻优结果为P*=5.156 9,I*=0.144 4,调节后的导前区曲线图如图4所示。经过49次搜索,得到惰性区参数寻优结果为P*=0.573 85,I*=0.075 968。调节后的惰性区曲线图如图5所示。
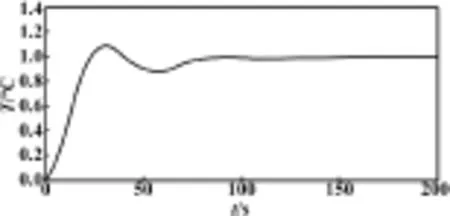
图4 导前区曲线图
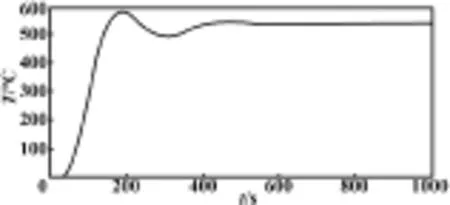
图5 惰性区曲线图
由图5可以看出,两次寻优的超调量分别为9.1%和7.2%。运行稳定时,输出的温度值为540 ℃,与预期值540/1=540 ℃相比,达到了稳态无静差的要求。因此本设计完全符合要求。
3.2 不同工况下
在600 MW超临界直流锅炉高温过热器动态特性中,随着负荷的变化,惰性区时间常数T和导前区的静态增益K等模型参数变化很大,用相同的控制器参数是不能够确保在其他工况下也满足相应控制系统品质的。因此,在控制系统的设计中,应该考虑对参数进行改变的控制方案。
按照上述步骤,对600 MW超临界机组75%工况下进行仿真研究。

然后,对初始参数进行设置,控制器的各项初始值均设定为1;目标函数设定为IAE积分型目标函数。
点击开始仿真后,经过近2 min后由图6可看出,经过32次搜索,得到的导前区参数寻优结果为P*=3.131 6,I*=0.089 889。调节后的导前区曲线图如图6所示。经过61次搜索,惰性区参数寻优结果为P*=0.515 91,I*=0.003 853 7。调节后的惰性区曲线图如图7所示。
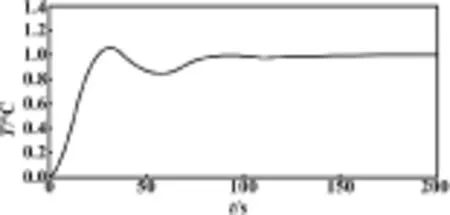
图6 导前区曲线图
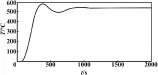
图7 惰性区曲线图
由上图可以看出,两次寻优的超调量分别为5.6%和6.6%。同100%工况下一样,75%工况也达到了稳态无静差的要求。因此,本软件也适用于600 MW超临界机组的其他负荷工况,结果比较令人满意。由此可知,本软件在调节PID参数领域具有一定的适应性。
如此看来,使用该参数寻优程序对超临界机组主汽温调节器参数的寻优,相比于传统PID寻优方法,整个过程效率和精确度提高了。而且在点击‘开始仿真’按钮后,用户无需任何其他操作,不仅快捷和方便,且能得到使系统快速、稳定运行的最优参数,为系统发挥其最佳性能提供支持。
4 结束语
采用改进型单纯形法和Matlab相结合的寻优方法,确定了一个实际系统的最优参数。本文给出了600 MW超临界机组在100%工况下的目标函数。根据文中所述方法,进行了针对主汽温调节器参数调节过程的仿真试验,并讨论其中的方法和步骤。随后在600 MW超临界机组其他工况下也进行了试验,适应性良好。将基于Matlab的参数寻优方法运用到热工的串级过热气温控制系统中,同样能够得到使系统满足设计要求的运行参数。
本文介绍了一种基于Matlab的过热汽温调节器参数寻优方法。这种方法原理简单,改变了传统方法依靠大量的经验和人工计算为主的做法,简化了仿真过程,令最终结果更加准确。
[1] 王振兴.600 WM超临界锅炉汽温特性分析[J].科技视界,2013(11):153-154.
[2] 段力学.PID参数整定方法分类与概述[J].现代计算机(专业版),2012(7):23-26.
[3] 刘晓谦,王勇,穆顺勇.基于单纯形法的PID控制器参数优化设计[J].计算机仿真,2004,21(11):191-193.
[4] 边立秀.热工自动控制系统[M].北京:中国电力出社,2001.
[5] 王文兰,苏晨.控制系统参数寻优软件在电厂热工控制教学中的应用[C]∥2013年全国自动化教育学术年会论文集,2013.
[6] 蒋珉.控制系统计算机仿真[M].北京:电子工业出社,2006.
[7] 赵永艳,王文兰.MATLAB在电力系统自动控制领域中的应用[J].重庆科技学院学报:自然科学版,2009,11(5):156-158.
[8] 宋晓燕,马德库,冬健峰.锅炉过热蒸汽温度的自动调节[J].自动化技术与应用,2000,19(2):34-36.
[9] 王亚顺,欧丽君.超临界直流锅炉对象特性及控制策略的研究[J].水利电力机械,2007,29(12):40-42.
Parameter Optimization for Main Steam Temperature Regulator of 600 MW Super Critical Power Unit
The main steam temperature systems of the fossil power units feature large inertia, long time delay and non-linearity, for this situation, and in accordance with relevant rules of parameter optimization for cascade control systems, with improved simplex method as the basis; the parameter optimization of super heated steam system is conducted using Matlab software. Traditional Ziegler-Nichols parameter tuning method has been widely applied in PID control design, but the optimization process is too cumbersome and certain limitation exists. Comparing with the traditional control method, using new tuning method in the main steam temperature regulator, the overshoot of the system is reduced, the response speed of the system is enhanced, and excellent control effect is obtained. The result of simulation indicates that although the control algorithms is evolving today, the simplex method still possesses certain superiority and development space; continue to study is awaited.
Tuning of PID controller Improved simplex method Parameter optimization Super critical Main steam temperature
内蒙古自然科学基金资助项目(编号:2013MS0919);
内蒙古工业大学重点科学研究基金资助项目(编号:ZD201320)。
苏晨(1989-),男,现为内蒙古工业大学控制工程专业在读硕士研究生;主要从事电厂新技术的研究。
TP311+.1
A
10.16086/j.cnki.issn1000-0380.201504003
修改稿收到日期:2014-09-04。
猜你喜欢
大电机技术(2022年3期)2022-08-06
舰船科学技术(2022年10期)2022-06-17
河北电力技术(2021年2期)2021-07-29
水泵技术(2021年6期)2021-02-16
中国特种设备安全(2020年11期)2020-06-09
电子制作(2019年20期)2019-12-04
宇航计测技术(2018年3期)2018-09-08
中成药(2017年8期)2017-11-22
汽车与新动力(2015年1期)2015-02-27
筑路机械与施工机械化(2014年10期)2014-03-01
