改进的LANDMARC在空间定位中的应用
2015-06-12 12:32:30马翠红丁建南杨友良孟凡伟
自动化仪表 2015年9期
马翠红 丁建南 杨友良 孟凡伟
(河北联合大学电气工程学院,河北 唐山 063000)
改进的LANDMARC在空间定位中的应用
马翠红 丁建南 杨友良 孟凡伟
(河北联合大学电气工程学院,河北 唐山 063000)
LANDMARC算法是在平面模型的基础上进行的定位分析,将其应用于空间定位时,会出现不同程度的误差。将LANDMARC算法和测距原理相结合,提出了一种基于测距机制的LANDMARC算法,并利用HIK-RFM104型UHF嵌入式读写模块和中电海康提供的圆极化天线,搭建了改进LANDMARC算法的空间模型。通过直线式测距实验,得到具体的测距模型。将LANDMARC空间模型和测距模型相结合,对空间中的采样点进行定位测试,分析数据后确定改进的LANDMARC空间定位算法。该算法具有更高的精度和更稳定的性能。
RFID 超高频 RSSI测距 LANDMARC算法 空间定位
0 引言
射频识别(RFID)技术以其非接触、非视距且定位精度高的特点[1],成为现今定位系统的首选技术。其中,超高频射频识别(UHF RFID)设备的读写距离较远[2],在定位设计中应用更为广泛。迄今为止,利用RFID技术进行定位主要分为两大机制:基于测距的定位机制和无需测距的定位机制[3]。基于测距的定位方法主要有依据信号到达时间(time of arrival,TOA)的定位技术[4]、依据信号到达时间差(time difference of arrival,TDOA)的定位技术[5]、依据信号到达角度(angle of arrival,AOA)的定位技术[6]和依据信号强度RSSI的定位技术。LANDMARC系统是一种基于无需测距机制的定位方法,其系统结构简单、精度较高[7]、可扩展性好[8],因此得到广泛应用。
传统LANDMARC系统是依托平面进行设计的。在实际应用中,待定位标签存在于空间中,由欧式距离因维数不同导致的计算误差,将直接影响定位精度。根据上述问题,本设计将基于RSSI的测距算法与LANDMARC算法相结合,提出一种基于测距机制的LANDMARC算法。
1 LANDMARC算法简介
LANDMARC采用“最近邻居”算法[9],与其他定位技术相比较,其更加精确、可靠[10]。LANDMARC示例模型如图1所示。

图1 LANDMARC示例模型
以图1为例,对LANDMARC算法原理说明如下。
图1所示模型中,有4个读写器、20个参考标签和1个待定位标签。参考标签CTj在4个阅读器上接收到的信号强度向量为:
(1)
待定位标签DT在4个阅读器上接收到的信号强度向量为:
SL=(SL1,SL2,SL3,SL4)
(2)
参考标签CTj和待定位标签DTi之间的RSSI距离为:
从所得的20个ELR中,选取k个小的ELR(k<20),组成集合为:
(3)
按照ELR的大小,赋予相应参考标签在定位过程中不同的权值,进而得到待定位标签的位置。
从LANDMARC模型可知,LANDMARC算法建立在平面上,实际定位算法往往需应用在三维空间中。将二维LANDMARC算法直接用于三维空间定位,势必会因为欧式距离的计算问题出现不同程度的误差,因此,需要对LANDMARC算法进行改进,使其适用于三维空间。
2 建立空间定位模型
传统的LANDMARC定位算法设计是应用于平面的,而在实际应用中往往要求在三维空间中对人员进行定位,因此需将定位模型构建在空间中。
系统采用海康圆极化天线。该天线可读取的最远距离为5 m,有效覆盖区域如图2所示。
对于4 m×9 m的空间而言,读写器可读取的范围覆盖整个区域。因此,天线安装的平面坐标按图2确定。
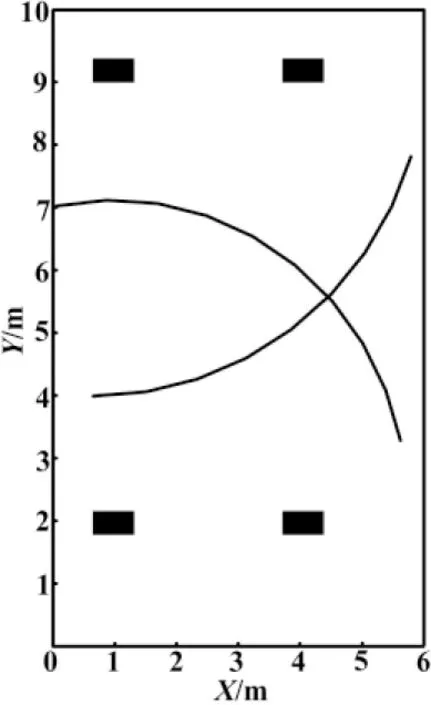
图2 天线覆盖区域
天线位置确定后,需设计参考标签的具体位置。为了适应天线安装的高度,确保算法的精确性,参考标签需要设定在整个空间中。但在实际应用中,在整个空间分布多层标签既不合理,也不可行。
将传统LANDMARC系统中参考标签的位置用相应的坐标点替换,即参考标签的坐标已知,在已知天线坐标的情况下,便可求出参考标签到天线的距离。改进后的系统结构如图3所示。

图3 LANDMARC实验模型
各参考坐标如表1所示。

表1 参考坐标
3 改进LANDMARC算法
对算法进行改进的主导思想是,将传统的LANDMARC算法与测距原理相结合,创建一种基于测距机制的定位算法。根据图3所示的模型,对改进的LANDMARC定位算法进行详细说明。
参考坐标到读写器的距离可以根据坐标计算得到:
(4)
(5)

待定位标签到读写器的距离为:
DL=(DL1,DL2,DL3,…,DLi)
(6)
式中:DL1为待定位标签到读写器1的距离。具体数值可根据式(7)计算得到。
RSSI=A-10nlg(DLi)
(7)
式中:RSSI为信号强度;A为读写器与待定位标签相距1m时接收到的信号强度;n为路径损耗指数。


(8)
计算得到的待定位标签的坐标为:
(9)
定位误差为[11]:
(10)
式中:(x,y,z)为测量得到的坐标;(x0,y0,z0)为所测点的实际坐标。
根据以上分析可知,要想运用改进的LANDMARC算法,还需要知道待定位标签到4个天线的距离。然而在系统的应用中,只能从读写器中获取接收到的标签信号强度信息,因此还需要将接收到的信号强度转换成距离,才可实现系统定位功能。
4 RSSI测距试验
从式(7)可知,为获得测距模型,必须先确定参数A和n的值。测距模型的精确性将直接影响到定位的准确性,因此需要在特定的室内,通过实验获取大量的实验数据,后期对实验数据进行处理,得到精确的参数A和n的值,确定合适的测距模型。
选择实验室为测距的具体场所,测距的实验平台由HIK-RFM104型UHF嵌入式读写模块、中电海康圆极化天线、标签和相关的套件组成。构建如图4所示实验模型。

图4 测距实验模型
选取实验室中较为空旷的位置,固定读写器于铝合金架上,距离地面高度为1 m。将读写器通过USB接口和SMA天线接口分别与计算机和天线相连接。设置天线功率为30 dBm,驻留时间为2 000 ms,盘讯周期为8 192,驻波比为100。
将标签固定在以瓦楞板为材料的支架上,调整标签的高度,使其与天线处于同一高度上,同时使支架与天线的中心在同一条直线上。以25 cm为步长,在距离读写器500 cm的长度内,设置20个测量点。
通过计算机与读写器的通信,使读写器持续向标签发送数据。同时,在每个测量点上,每隔5 s记下一个RSSI的数值,每个测量点记录10个RSSI值。其中,RSSI值通过程序读出。
整理实验数据,求得每个测量点处10个RSSI值的平均值。绘制表格,记录测量点与读写器之间的距离和相应点处RSSI的平均值。整理后的实验数据如表2所示。
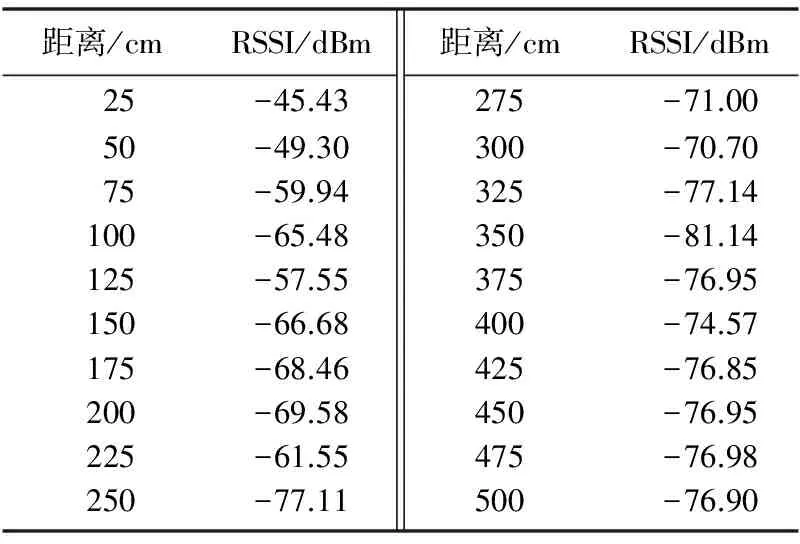
表2 RSSI值与测量距离
根据式(10),利用Matlab提供的内建函数laqcurvefit进行既定样式曲线拟合,得到A和n的值,确定准确的RSSI与距离的关系模型。
关键Matlab拟合语句为:
fun=inline(′a(1)-10*a(2)*log10(X)′,′a′,′X′);
a0=[1,1];
a=lsqcurvefit(fun,a0,X,Y)
Ya=fun(a,Xi);
RSSI与距离关系拟合曲线如图5所示。

图5 RSSI与距离关系拟合曲线
根据拟合程序可得:A=-60.75,n=2.61。
测距模型为:
RSSI=-60.75-10×2.61×lg(d)
(11)
在得到测距模型后,测得天线接收到标签的信号强度信息,便可以将信号强度转换成距离,进而应用改进的LANDMARC算法,对人员进行定位。信号的具体传输过程如图6所示。

图6 信号转换图
当4个天线检测到标签时,将获取的待定位标签信号强度RSSI传输到读写器中。计算机通过软件开发环境Visual studio 2010将信号强度转换成距离。具体转换程序如下:
static voidMain(string[] args)
{double a,b,d,r;
r=-45.43;
a=10.0;
b=(-60.7524 - r) / 26.1;
d=Math .Pow (a,b);
Console.WriteLine ("长度为:"+d);
5 定位功能分析
为了说明改进后的LANDMARC算法的精确度,在如图3所示的模型边缘和区间中,随机选取20个点,作为待定位标签的放置位置。分别运用传统的LANDMARC算法和改进的LANDMARC算法对选取的20个点进行坐标计算。然后,将两次算法得到的坐标与20个点的实际坐标相比较,得出定位误差比较图,如图7所示。

图7 待定位标签估计误差比较
由图7可知,在空间定位应用中,改进的LANDMARC算法定位误差小于传统的LANDMARC算法。对于处于区域边缘的待定位标签,改进的LANDMARC算法精确度远高于传统的LANDMARC算法。
在确定了改进的LANDMARC算法在精确性方面有所改善后,还需要对算法的稳定性进行分析。算法是否稳定将直接影响到定位算法的可行性。本设计采用累积分布函数(cumulative distribution function,CDF)来说明改进算法的稳定性。该函数是指处于某个定位精度的测量次数占总测量次数的比例,例如定位精度大于2 m的测量次数占总测量次数的百分比。对20个数据进行分析后所得的CDF图如图8所示。

图8 CDF曲线比较
传统的LANDMARC算法在应用于空间定位时,会出现较大幅度的波动。改进后的LANDMARC算法的估计误差(estimation error,EE)在1.5 m后趋于稳定,定位精度收敛速度虽相对较慢,但稳定性较好。
6 结束语
针对LANDMARC算法在实际空间定位中存在一定误差的问题,对LANDMARC算法进行改进,使其与RSSI与距离转换模型相结合。将LANDMARC算法建立在距离的基础上,用测试距离代替信号强度,在减少参考标签、降低成本的同时,提高了空间定位精度。
[1] 李魏峰.基于RFID的室内定位技术研究[D].上海:上海交通大学,2010.
[2] 王峰.基于UHF RFID的室内定位系统的研究与设计[D].重庆:重庆大学,2012.
[3] 叶萍,张彦.基于RSSI测距的交点质心定位算法研究与室内应用修正[J].技术纵横,2013(3):104-107.
[4] 徐春妹.基于TOA的无线定位技术及应用[J].矿山机械,2007,35(7):109.
[5] 孟令军,王建亮,潘峰.基于TDOA定位机制的无线传感器网络节点设计[J].传感器与微系统,2009,28(6):101.
[6] 汪洪雁,陈黎霞.NLOS环境下TDOA/AOA混合定位算法研究[J].计算机应用,2007,27(5):1100.
[7] 张玉茹,谭丽萍.改进LANDMARC最近邻居算法在嵌入式系统的实现[J].哈尔滨商业大学学报,2013,29(3):333.
[8] 闫保中,姜琛,尹伟伟.基于RFID技术的室内定位算法研究[J].计算机仿真,2010,27(2):320.
[9] 刘宗元.基于射频识别(RFID)的室内定位系统研究[D].广州:中山大学,2009.
[10]蒋华勤,李静.基于LANDMARC的RFID室内定位算法优化[J].科技通报,2013,29(6):207.
[11]邹学玉,韩付伟.基于LANDMARC的最近邻居改进算法[J].武汉大学报,2012,59(3):256.
Application of the Improved LANDMARC in Spatial Positioning
LANDMARC algorithm is applied in positioning analysis based on plane model, when it is applied in spatial positioning, different degree of errors may occur. Combining LANDMARC with the ranging principle, the LANDNARC algorithm based on distance measuring mechanism is proposed; and the spatial model of LANDMARC is established by adopting HIK-RFM104 UHF embedded read/write module and the circularly polarized antenna provided by CETHIK. Specific distance measurement model is obtained through linear distance measuring experiments. Combining LANDMARC spatial model and distance measuring model, positioning tests are conducted for the sampling points in the space, by analyzing the data, it is determined that the improved LANDMARC spatial positioning algorithm possesses higher accuracy and more stable performance.
Radio frequency identification (RFID) Ultra high frequency (UHF) RSSI ranging LANDMARC algorithm Spatial positioning
河北省科学技术计划基金资助项目(编号:12276906D)。
马翠红(1960-),女,1982年毕业于河北工业大学自动化专业,获学士学位,教授;主要从事自动控制理论的教学与科研工作。
TH89
A
10.16086/j.cnki.issn1000-0380.201509005
修改稿收到日期:2015-01-05。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17 06:05:42
科学(2020年3期)2020-01-06 04:02:51
现代测绘(2018年1期)2018-03-06 05:16:16
电子制作(2017年7期)2017-06-05 09:36:13
测绘通报(2016年9期)2016-12-15 01:56:16
计算机工程(2015年8期)2015-07-03 12:19:45
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
中国交通信息化(2014年4期)2014-06-05 03:51:10
北京航空航天大学学报(2013年6期)2013-12-19 08:58:16