
数字式金属探测定位系统的设计
2015-06-12 12:32:13王立谦
自动化仪表 2015年6期
王立谦 陈 强
(华中科技大学武昌分校机电与自动化学院,湖北 武汉 430064)
数字式金属探测定位系统的设计
王立谦 陈 强
(华中科技大学武昌分校机电与自动化学院,湖北 武汉 430064)
针对非接触式寻找目标区域金属物的检测定位系统,使用新型电感数字传感器LDC1000作为检测元件,利用传感器所带线圈产生的交变磁场检测进入磁场范围内的金属物,以加载传感器的遥控小车,进行扫描路径的控制。系统以工作频率为8 MHz的STM32单片机为主控核心接收并处理检测数据,控制直流减速电机带动无线遥控小车进行区域扫描,无线遥控通过SI4432通信模块实现。试验结果表明,系统可以提供高效的金属探测及定位功能,且实现了探测仪的小型化和远距遥控,具有较高的应用价值。
金属探测 LDC1000 STM32 交变磁场 无线遥控 小型化
0 引言
金属探测器作为一种常见的安全检查设备,广泛地应用于社会生活、工业生产、军事等领域。常见的金属探测器一般采用霍尔传感器作为传感器,但是这种传感器需要配合较复杂的硬件电路,如放大电路、A/D转换电路、校准电路等,且误差较大[1-3]。
基于感测技术的电感数字传感器LDC1000能够不接触目标物体而将金属导体的检测信号数字化;无需校准,可直接与控制部件进行数据通信,从而使得外部硬件电路大大简化。此外,该传感器不仅能够检测目标区域内是否存在金属导体,还能够检测目标导体与传感器之间的距离,因此具有精度高、体积小、结构简单、无触点等特点,能够在灰尘、污垢、油污及潮湿环境中实现导体目标的低成本、高分辨率的感测。相比之下,设计开发基于电感数字传感器检测元件的金属检测系统具有很强的实用意义。此外,电感数字传感器采用线圈产生磁场,不需要磁体和复杂的校准,不使用稀土,因此更为环保。
1 系统总体设计
1.1 工作原理
系统工作原理如图1所示。

图1 涡流传感器工作原理Fig.1 The working principle of eddy current sensor
根据电磁理论, 当金属物体被置于变化的磁场中时,金属导体内就会产生自行闭合的感应电流,这就是金属的涡流效应[4-6]。电感数字传感器LDC1000利用电磁感应原理,在传感器自身线圈上加一个交变电流I1,线圈周围产生交变电磁场H1。这时如果有金属物体进入此电磁场,会在金属物体表面产生涡流H2(感应电流I2)。涡流电流跟线圈电流方向相反,涡流产生的感应电磁场跟线圈的电磁场方向相反。该涡流是金属物体种类、距离、大小的函数。涡流产生的反向磁场跟线圈耦合在一起,如一次级线圈。这样LDC1000的线圈作为初级线圈,涡流效应作为次级线圈,就形成了一个变压器。由于变压器的互感作用,在初级线圈侧就可以检测到次级线圈的参数。
当在线圈侧并联一个电容在电感上时,由于LC的并联谐振作用能量损耗大大减小,能量只消耗在R1和R2′上,因此检测出(R1+R2′)的损耗就可以间接地检测到金属物体的距离、种类等。LDC1000能够将检测出的等效电阻直接转换为数字量并送控制部分进行处理。
1.2 系统总体结构
金属探测仪的硬件电路主要由传感器检测系统、STM32驱动直流减速电机系统和无线接收遥控系统3部分组成,其整体结构图如图2所示。STM32首先对LDC1000进行配置,设置其检测范围,然后接收其检测数据。

图2 系统总体结构Fig.2 The system structure
LDC1000数字传感器在线圈中加交变电流,以产生交变磁场;小车以无线遥控方式带动车载传感器,以扫描方式对被测区域进行扫描。当传感器附近无金属物体时,产生一个基准信号;当有金属物体进入交变磁场后,产生涡流效应,使得传感器端的等效电感与阻抗均发生变化。LDC1000数字传感器将此变化的阻抗信号转换为数字量,并通过SPI方式与STM32进行数据传递,STM32通过与基准信号比较,得出数据是否异常。
2 系统硬件电路设计
系统采用STM32F103ZE为控制核心,其内核工作频率可高达72 MHz,使系统对数据的运算处理有较大裕量;其丰富的I/O端口、大量的片上外设以及丰富的固件库使得系统的硬件电路体积更小,编程更简单,可靠性更高。系统使用了2个SPI接口、3个16位定时器以及大量的通用I/O口[7-9]。
2.1 传感器检测电路设计
系统采用电感数字传感器LDC1000对金属物进行检测。LDC1000传感器体积小,灵敏度高,且其能够直接输出数字量,使得系统硬件电路结构非常简单。主控芯片与传感器通过SPI模式直接进行数据传递,硬件成本低。主控芯片工作电路及传感器芯片连接的硬件电路如图3所示。LDC1000的工作频率由STM32的1个32位定时器产生提供,SPI的通信速率设定为5 kHz。
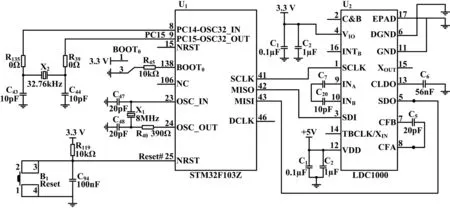
图3 传感器检测电路Fig.3 The detection circuit of the sensor
2.2 无线遥控模块电路设计
无线接收模块接收无线遥控信号,实现对车载传感器的移动路径控制;遥控传感器对目标区域进行逐次扫描,将人与检测区域隔离开来。无线遥控接收模块采用高度集成的SI4432芯片,它具有极低的接收灵敏度(-118 dBm)及较大的输出功率,有效通信距离可达1 km,无需外加功放电路即可保证传输范围和穿透能力。无线接收模块接收到遥控信息后,通过SCLK、SDI及SDO与STM32的第二个SPI口进行数据传递。无线接收硬件电路如图4所示。
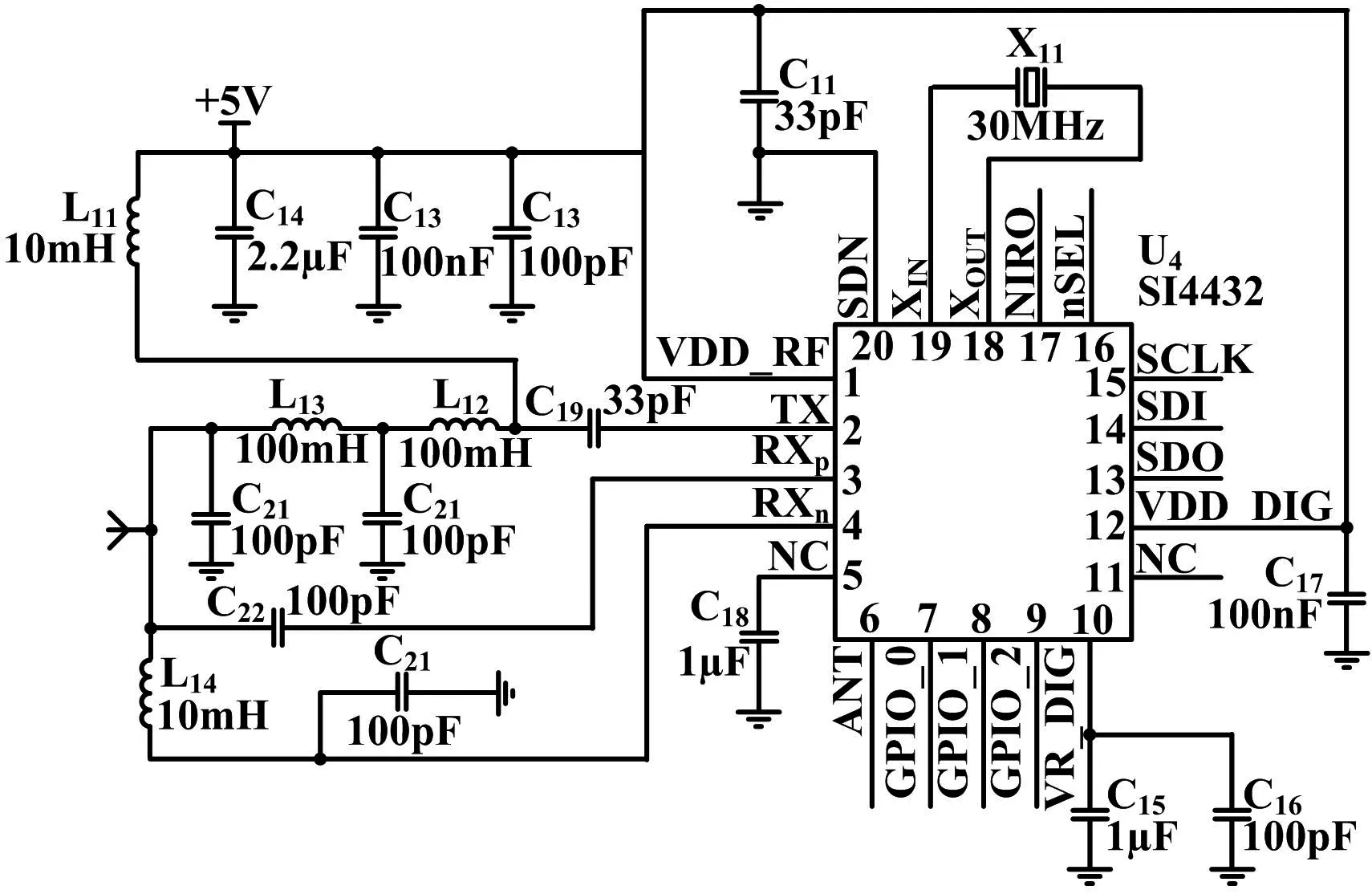
图4 无线接收电路Fig.4 The wireless receiving circuit
STM32先对SI4432进行配置。无线通信频率高时通信距离较近,因此根据通信距离,设定其无线通信频率为较低的433 MHz,工作于FIFO模式,波特率为9 600 bit/s。工作模式确定后,当SI4432接收到有效数据时,nIRQ会出现一个低电平,触发STM32中断,STM32即可通过SPI方式接收无线数据。
2.3 直流减速电机驱动电路设计
主控芯片根据遥控信号驱动电机带动小车运行。为了使探测器可以在脏污复杂环境中使用,系统采用两个大力矩的直流减速电机带动小车。电机驱动采用飞思卡尔公司的驱动芯片MC33886,它可连续提供5 A电流,驱动负载能力强。STM32采用16位定时器产生PWM波对电机进行速度控制。当车载传感器需要作非直线运动时,可通过使两个电机得到的PWM波占空比不同实现。由于系统为遥控控制,且减速直流电机性能平稳,因此未设测速单元。具体的硬件设计电路如图5所示,IN1和IN2与STM32的I/O口直连。
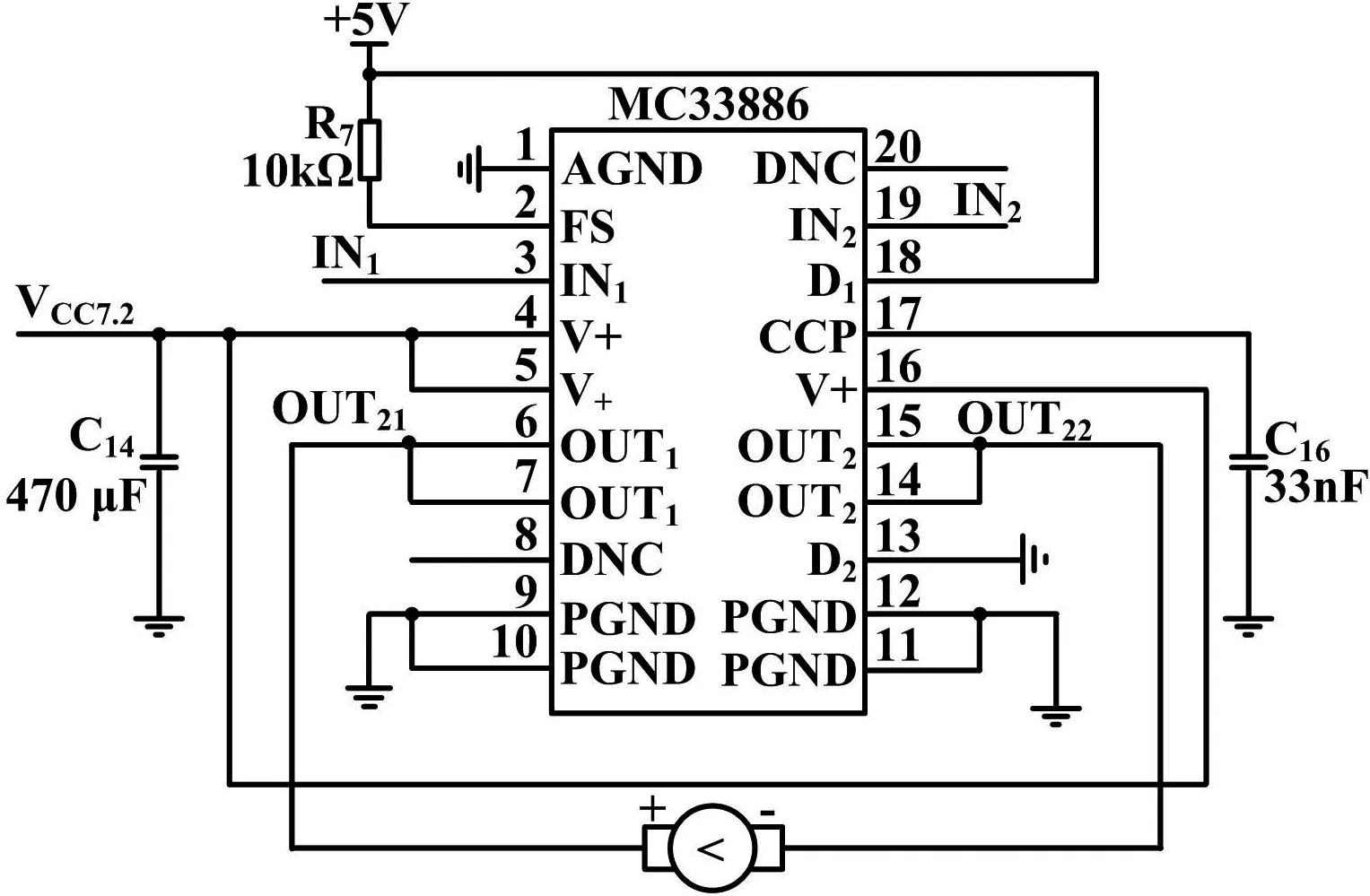
图5 直流减速电机驱动电路Fig.5 The drive circuit of DC gear motor
此外,由于各类芯片工作电压不同,还进行了电源模块的设计,分别为系统提供+3.3 V、+5 V和+7.2 V电压。
3 金属导体检测系统软件设计
系统主流程图如图6所示。

图6 系统主流程图Fig.6 The main flowchart of the system
LDC1000应用非常灵活,不仅可以检测金属物的位置,还可以检测目标与传感器线圈的距离,并且通过调整线圈,可以调整检测范围。根据测试试验条件,LDC1000需检测2 cm~3 m范围内的金属物,为了提高测量精度及反应速度,对其量程进行配置。根据传感器距金属物最近及最远的测量数据,将LDC1000的寄存器配置为RpMAX=2 968,RpMIN=27 681。
此外,在实际应用中,检测到的原始数据可能受到噪声的干扰。经在线调试,传感器的检测数据在一定范围内小幅波动。由于STM32运算速度较快,有较大预量,且为了得到更有效的数据以进行目标识别,系统针对检测数据进行大数据量的平滑处理[10],处理点数为100点。
4 测试数据
对实验室中可获得的3种金属物:铁丝、一角硬币(镍合金)和易拉罐拉环 (铝合金)进行了实测研究, 主要包括对线圈的灵敏度和快速性的研究。固定所有试验条件, 测试不同金属种类下传感器的检出率和检出速度。所测得的数据如表1所示。探测小车置于4 m2的木板上,其对木板下放置的金属物进行检测。
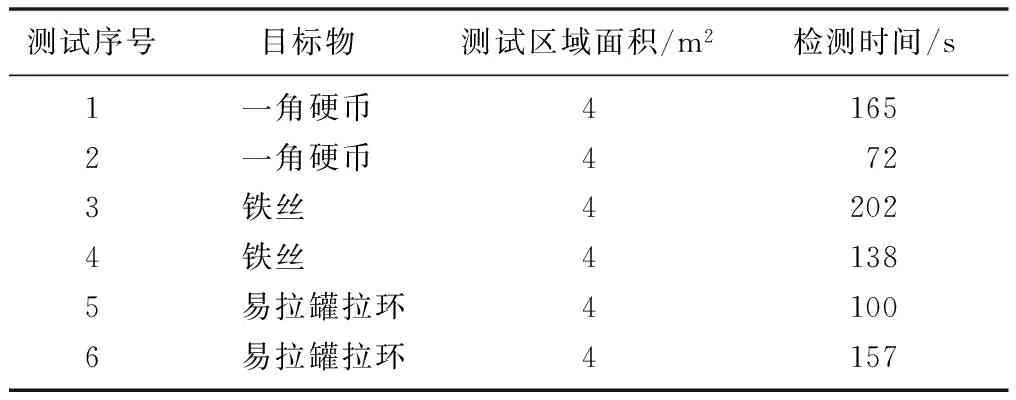
表1 检测数据Tab.1 Testing data
由于系统是以线圈附近无金属物时的检测信号作为基准信号,不同金属导体均会产生不同于基准信号的异常数据,因此系统可检测出不同的金属物,达到了系统所要求的性能指标。
5 结束语
本文设计了一种用于金属探测的遥控车载探测仪。在分析计算电感强度的基础上,采用STM32单片机作为核心控制电路,以基于感测技术的电感数字传感器作为传感器,以无线遥控小车作为控制扫描路径的手段,搭建了系统检测电路。试验在4 m2范围内进行,系统多次采样求平均值,对不同金属物进行检测,检出率达100%。本系统硬件电路简单,体积小,可以对狭小及恶劣环境中进行遥控检测,具有精度高、速度快的特点,应用范围较广。
[1] 洪文峰,魏立峰.智能金属探测器设计[J].工矿自动化,2013,39(4):40-43.
[2] 贺桂芳.一种新型智能金属探测仪的设计[J].仪表技术与传感器,2006(1):13-15.
[3] 卢超.基于AT89S52的安检金属探测仪[J].仪表技术与传感器,2010(12):26-28.
[4] 蒋齐密,张新访,刘土光,等.电涡流检测系统的参数设置依据[J].无损检测,2001(3):100-102.
[5] 曹青松,周继惠.基于电涡流的金属种类识别技术的理论与实验研究[J].仪器仪表学报,2007,28(9):1718-1722.
[6] 明军,贾海波,王新. 一种在线智能金属检测装置[J].仪表技术与传感器,2013(5):20-21.
[7] 刘火良,杨森.STM32库开发实战指南[M].北京:机械工业出版社,2013:63-85.
[8] 孙启富,孙运强,姚爱琴.基于STM32的通用智能仪表设计与应用[J].仪表技术与传感器,2010(10):34-36.
[9] 喻金钱,喻斌.STM32F系列ARM Cortex-M3微控制器原理与实践[M].北京:北京航空航天大学出版社,2008:110-135.
[10]谭浩强.C语言程序设计[M].北京:清华大学出版社,2005:132-145.
Design of the Digital Metal Detection and Locating System
Aiming at the non-contact detection and locating system for the metal object in target area, by adopting the new type of inductive digital sensor LDC1000 as the detecting component, and the alternating magnetic field generated by the coil of sensor to detect the metal object inside the magnetic field. With the remote controlled car of the loading sensor the scanning path is controlled. With STM32 single chip computer as the main control core that is working at 8 MHz, the detection data are
and processed to control DC geared motor, drive the wireless remote controlled car for scanning the target area; the wireless remote control is implemented via SI4432. The result of tests shows that the system can provide high efficient metal detection and locating functions, and realize miniaturization and remote control for the detector, it possesses higher applicable value.
Metal detection LDC1000 STM32 Alternating magnetic field Wireless remote control Miniaturization
湖北省教育科学十二五规划课题项目(编号:2014B316)。
王立谦(1975-),女,2007年毕业于中国地质大学通信工程专业,获硕士学位,讲师;主要从事嵌入式技术的研究。
TH865
A
10.16086/j.cnki.issn1000-0380.201506007
修改稿收到日期:2014-12-29。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
大电机技术(2022年4期)2022-08-30 01:38:30
中国特种设备安全(2021年5期)2021-11-06 05:09:26
装备制造技术(2020年11期)2021-01-26 00:39:12
模具制造(2019年7期)2019-09-25 07:29:58
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
通信电源技术(2018年5期)2018-08-23 01:16:00
汽车维护与修理(2015年6期)2015-02-28 12:17:05
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18
汽车科技(2014年6期)2014-03-11 17:46:08
